S-ar putea să vă placă și
- Power Electronics Applied to Industrial Systems and Transports, Volume 1: Synthetic Methodology to Converters and Components TechnologyDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 1: Synthetic Methodology to Converters and Components TechnologyÎncă nu există evaluări
- Automatic Solar Tracker With Dust Wiper Using PID ControllerDocument6 paginiAutomatic Solar Tracker With Dust Wiper Using PID ControllerEditor IJTSRD100% (1)
- A Study of Solar Power Monitoring System Using Internet of Things (IOT)Document4 paginiA Study of Solar Power Monitoring System Using Internet of Things (IOT)International Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Power Generation From Suspension by Piezo Eiectric Transducer 1Document47 paginiPower Generation From Suspension by Piezo Eiectric Transducer 1Data boltechÎncă nu există evaluări
- Applications of Solar CellDocument5 paginiApplications of Solar CellVenkatappa Rao TumuÎncă nu există evaluări
- Arduino Uno r3 PDFDocument9 paginiArduino Uno r3 PDFDANIEL ALEJANDRO LEMUS RINCONÎncă nu există evaluări
- Mo at Source PDFDocument2 paginiMo at Source PDFcavcicÎncă nu există evaluări
- Pavan PDFDocument86 paginiPavan PDFmpavanÎncă nu există evaluări
- En CD00201961 PDFDocument39 paginiEn CD00201961 PDFIrini Fountouli - LadopoulouÎncă nu există evaluări
- Switched Reluctance Motor PDFDocument79 paginiSwitched Reluctance Motor PDFHAMID SULIAMANÎncă nu există evaluări
- Reduction of Power MOSFET Losses in Hard-Switched ConvertersDocument2 paginiReduction of Power MOSFET Losses in Hard-Switched ConvertersWesley de PaulaÎncă nu există evaluări
- Solar Tracking SystemDocument17 paginiSolar Tracking SystemHemant SumanÎncă nu există evaluări
- MPPT Using Sepic ConverterDocument109 paginiMPPT Using Sepic ConverterSandhya RevuriÎncă nu există evaluări
- Arduino Solar Charge Controller (Version 2Document38 paginiArduino Solar Charge Controller (Version 2Thirumal Valavan100% (1)
- Chapter 4 DC To Ac INVERTERSDocument57 paginiChapter 4 DC To Ac INVERTERSAlester GabrielÎncă nu există evaluări
- Obstacle Avoidance RobotDocument40 paginiObstacle Avoidance RobotPraveen ReddyÎncă nu există evaluări
- Jones Tutorial 2 On Stepping MotorsDocument125 paginiJones Tutorial 2 On Stepping MotorsVictor UrbinaÎncă nu există evaluări
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 paginiMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyÎncă nu există evaluări
- Solar InverterDocument18 paginiSolar InverterPradip Magar100% (1)
- Solar Battery Charger With MPPT Using MicrocontrollerDocument28 paginiSolar Battery Charger With MPPT Using MicrocontrollerTrương Văn TrọngÎncă nu există evaluări
- Power Electronic Converter Topologies UsDocument79 paginiPower Electronic Converter Topologies UsEko Nurcahyo100% (1)
- Controlling An AC Load With A MOSFET - All About CircuitsDocument11 paginiControlling An AC Load With A MOSFET - All About CircuitsBill WhiteÎncă nu există evaluări
- Embedded Systems Projects ListDocument38 paginiEmbedded Systems Projects ListMayank ChauhanÎncă nu există evaluări
- Electronics Project in WorldDocument48 paginiElectronics Project in WorldHardikÎncă nu există evaluări
- Dual Axis Tracker For Parabolic Solar ConcentratorsDocument24 paginiDual Axis Tracker For Parabolic Solar ConcentratorsHasnain MuhammadÎncă nu există evaluări
- Arduino IDE 14 Marzo 18 PDFDocument65 paginiArduino IDE 14 Marzo 18 PDFSamantha DeceÎncă nu există evaluări
- Advances in Power Electronics and Power Converters 1678540366Document10 paginiAdvances in Power Electronics and Power Converters 1678540366Trirong KampoolÎncă nu există evaluări
- Speed Control For BLDC Using Pid AlgorithmDocument14 paginiSpeed Control For BLDC Using Pid Algorithmtoufani95Încă nu există evaluări
- Adafruit Huzzah Esp8266 BreakoutDocument48 paginiAdafruit Huzzah Esp8266 Breakoutwaqasahmed1988100% (1)
- Mosfet Driver Theory and ApplicationsDocument28 paginiMosfet Driver Theory and ApplicationsRoga29Încă nu există evaluări
- Voice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Document16 paginiVoice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Rana Arslan100% (1)
- Electronics & Telecommunication Engineering Koustuv Institute of Self DomainDocument25 paginiElectronics & Telecommunication Engineering Koustuv Institute of Self DomainArbinda DasÎncă nu există evaluări
- Automatic Solar Tracker SystemDocument8 paginiAutomatic Solar Tracker SystemAbhay TiwariÎncă nu există evaluări
- Fundamental Understanding of Piezoelectric Strain SensorsDocument5 paginiFundamental Understanding of Piezoelectric Strain SensorsNemoz ZrÎncă nu există evaluări
- BLDC ControlDocument16 paginiBLDC ControlSaurabh DashÎncă nu există evaluări
- Control of BLDC Motor Using dsPIC30F2010 Final Year ProjectDocument54 paginiControl of BLDC Motor Using dsPIC30F2010 Final Year ProjectShreyankh Krishy50% (2)
- Women Safety Night Patrolling RobotDocument8 paginiWomen Safety Night Patrolling RobotIJRASETPublicationsÎncă nu există evaluări
- Power ElectronicsDocument451 paginiPower ElectronicsSteven SengÎncă nu există evaluări
- Controlling Oxygen Sensors With An Automotive MicrocontrollerDocument81 paginiControlling Oxygen Sensors With An Automotive MicrocontrollerANIAPIERONI100% (1)
- Nano ElectronicsDocument41 paginiNano Electronicschatterjee_somenath2204Încă nu există evaluări
- Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application TrendsDocument67 paginiPosition and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application TrendsTri Wahono100% (1)
- Surveillance With Face Recognition Door LockDocument26 paginiSurveillance With Face Recognition Door LockAkashÎncă nu există evaluări
- Microcontroller Based Solar Charger: A Project Report OnDocument51 paginiMicrocontroller Based Solar Charger: A Project Report Oniwantinthatve67% (3)
- BM1380 Datasheet v1.0 PDFDocument10 paginiBM1380 Datasheet v1.0 PDFDarwinÎncă nu există evaluări
- Thailand Solar Tracker System (Eng1)Document23 paginiThailand Solar Tracker System (Eng1)Hafiezul HassanÎncă nu există evaluări
- Smart Street Light For Energy ConservationDocument5 paginiSmart Street Light For Energy ConservationkhalidÎncă nu există evaluări
- Final Year Project ReportDocument40 paginiFinal Year Project ReportNAKUL KANARÎncă nu există evaluări
- Designing Planar Magnetics DixonDocument26 paginiDesigning Planar Magnetics Dixonarulsrini77Încă nu există evaluări
- M.E Power Electronics and Drives Semester I To Semester IV R 18Document50 paginiM.E Power Electronics and Drives Semester I To Semester IV R 18Senthilnathan ArumugamÎncă nu există evaluări
- Visvesvaraya Technological University: A Mini-Project ReportDocument20 paginiVisvesvaraya Technological University: A Mini-Project ReportPrithish MayyaÎncă nu există evaluări
- Tutorial MyrioDocument57 paginiTutorial MyrioLucky Pandu Melyanto100% (1)
- Arduino Uno Overview PDFDocument11 paginiArduino Uno Overview PDFJose LopezÎncă nu există evaluări
- Project ListDocument20 paginiProject ListAniket ChavanÎncă nu există evaluări
- Back EMF Detection Method For Sensorless Brushless DCDocument91 paginiBack EMF Detection Method For Sensorless Brushless DCnicoletabytaxÎncă nu există evaluări
- Applications of Thermoelectric Energy: A ReviewDocument5 paginiApplications of Thermoelectric Energy: A ReviewIJRASETPublicationsÎncă nu există evaluări
- Electromagnetic Foundations of Electrical EngineeringDe la EverandElectromagnetic Foundations of Electrical EngineeringÎncă nu există evaluări
- Real-Time Simulation Technology for Modern Power ElectronicsDe la EverandReal-Time Simulation Technology for Modern Power ElectronicsÎncă nu există evaluări
- MATLAB Importance Powerplant Design Issues Introduction of MATLAB Applications of MATLAB Merits and Demerits of MATLAB Power SystemsDocument3 paginiMATLAB Importance Powerplant Design Issues Introduction of MATLAB Applications of MATLAB Merits and Demerits of MATLAB Power SystemsPidikiti Surendra BabuÎncă nu există evaluări
- Iot Based Vehicle Pollution Monitoring and Alerting System Using Thingspeak Server and GSMDocument6 paginiIot Based Vehicle Pollution Monitoring and Alerting System Using Thingspeak Server and GSMPidikiti Surendra BabuÎncă nu există evaluări
- Major Project Separate ListDocument8 paginiMajor Project Separate ListPidikiti Surendra BabuÎncă nu există evaluări
- BroucherDocument4 paginiBroucherPidikiti Surendra BabuÎncă nu există evaluări
- A Project Report On Precise Kilometer Calculation by Underground Cable Fault DetectorDocument101 paginiA Project Report On Precise Kilometer Calculation by Underground Cable Fault DetectorPriya SharmaÎncă nu există evaluări
- 1Document4 pagini1Pidikiti Surendra BabuÎncă nu există evaluări
- Eee-Mini List PDFDocument71 paginiEee-Mini List PDFPidikiti Surendra BabuÎncă nu există evaluări
- Design and Analysis of Cylinder Head FinsDocument1 paginăDesign and Analysis of Cylinder Head FinsPidikiti Surendra BabuÎncă nu există evaluări
- Vlsi DesignDocument1 paginăVlsi DesignPidikiti Surendra BabuÎncă nu există evaluări
- 1.design and Analysis of DTH Drill BitDocument1 pagină1.design and Analysis of DTH Drill BitPidikiti Surendra BabuÎncă nu există evaluări
- 2.design and Analysis of PistonDocument1 pagină2.design and Analysis of PistonPidikiti Surendra BabuÎncă nu există evaluări
- 11Document2 pagini11Pidikiti Surendra BabuÎncă nu există evaluări
- 9.design of Vertical Axis Wind TurbineDocument1 pagină9.design of Vertical Axis Wind TurbinePidikiti Surendra BabuÎncă nu există evaluări
- Eee-Mini List PDFDocument71 paginiEee-Mini List PDFPidikiti Surendra BabuÎncă nu există evaluări
- Led and 7 SegmentDocument21 paginiLed and 7 SegmentPidikiti Surendra BabuÎncă nu există evaluări
- DataaDocument1 paginăDataaPidikiti Surendra BabuÎncă nu există evaluări
- Mini Simulation Projects List: MECHANICAL-2020Document4 paginiMini Simulation Projects List: MECHANICAL-2020Pidikiti Surendra BabuÎncă nu există evaluări
- Mother Theresa College Final Embedded TitlesDocument2 paginiMother Theresa College Final Embedded TitlesPidikiti Surendra BabuÎncă nu există evaluări
- Data SetDocument1 paginăData SetPidikiti Surendra BabuÎncă nu există evaluări
- Impact of Energy Storage On Hybrid Ac-Dc Micro-Grid During Pulse LoadDocument9 paginiImpact of Energy Storage On Hybrid Ac-Dc Micro-Grid During Pulse LoadPidikiti Surendra BabuÎncă nu există evaluări
- Ledand 7 SegmentDocument1 paginăLedand 7 SegmentPidikiti Surendra BabuÎncă nu există evaluări
- 11Document3 pagini11Pidikiti Surendra BabuÎncă nu există evaluări
- Dot NetDocument16 paginiDot NetPidikiti Surendra BabuÎncă nu există evaluări
- Electrical List (Cost High)Document2 paginiElectrical List (Cost High)Pidikiti Surendra BabuÎncă nu există evaluări
- 12Document1 pagină12Pidikiti Surendra BabuÎncă nu există evaluări
- 5Document3 pagini5Pidikiti Surendra BabuÎncă nu există evaluări
- 14Document3 pagini14Pidikiti Surendra BabuÎncă nu există evaluări
- SNO Date LW Name of The Mother AGE MR No G P L A DDocument59 paginiSNO Date LW Name of The Mother AGE MR No G P L A DPidikiti Surendra BabuÎncă nu există evaluări
- 11Document2 pagini11Pidikiti Surendra BabuÎncă nu există evaluări
- The Ve3Gk Plastic, 3 To 56 MHZ HF Mobile AntennaDocument3 paginiThe Ve3Gk Plastic, 3 To 56 MHZ HF Mobile AntennaDavid GallegoÎncă nu există evaluări
- 12v Audio AmplifierDocument13 pagini12v Audio AmplifierSusrita Barai100% (1)
- 8810 UserguideDocument64 pagini8810 UserguideUTC2011Încă nu există evaluări
- Gender Recognition System Using Speech SignalDocument9 paginiGender Recognition System Using Speech SignalijcseitÎncă nu există evaluări
- BLR CMT Short ManualDocument8 paginiBLR CMT Short ManualGUSGPÎncă nu există evaluări
- Cisco IP Conference Phone 8832 Data Sheet - CiscoDocument54 paginiCisco IP Conference Phone 8832 Data Sheet - Ciscoedmund_dantes66Încă nu există evaluări
- Computer Assembly: IT Essentials: PC Hardware and Software v4.0Document74 paginiComputer Assembly: IT Essentials: PC Hardware and Software v4.0sabry_100Încă nu există evaluări
- Chapters of Assembly Language 2Document178 paginiChapters of Assembly Language 2ezerobert56_86874258Încă nu există evaluări
- MD110COMMANDDocument39 paginiMD110COMMANDCristina Rayhan100% (2)
- Ten Things To Do With A PCDocument4 paginiTen Things To Do With A PCYohaira MoscosoÎncă nu există evaluări
- 02-02 The Benefits of SAN and NAS Storage PDFDocument18 pagini02-02 The Benefits of SAN and NAS Storage PDFJosecriz DalmacioÎncă nu există evaluări
- Timetable Ee Spring 2015Document2 paginiTimetable Ee Spring 2015Rizwan IqbalÎncă nu există evaluări
- R-838 SpecsDocument1 paginăR-838 SpecscordovadelatorreÎncă nu există evaluări
- Sharp LC32 - 37g4u PDFDocument114 paginiSharp LC32 - 37g4u PDFFranciscoGomezÎncă nu există evaluări
- Expression Mr200Document6 paginiExpression Mr200Alexandra JanicÎncă nu există evaluări
- Module 6 in 4th QuarterDocument2 paginiModule 6 in 4th QuarterAlmirah Jeam Binalay DamiasÎncă nu există evaluări
- SBC Ru 110: Universal Remote ControlDocument44 paginiSBC Ru 110: Universal Remote ControlVictor LiraÎncă nu există evaluări
- Satellite Remote Sensing: Monitoring Ground Surface Movement & Application On Tailings DamsDocument20 paginiSatellite Remote Sensing: Monitoring Ground Surface Movement & Application On Tailings DamsOlaaxxÎncă nu există evaluări
- Detection of Fire and Gas Using Arduino and Bluetooth ModuleDocument6 paginiDetection of Fire and Gas Using Arduino and Bluetooth ModuleSAURAV PANDEYÎncă nu există evaluări
- Anexo 2. LLC741x RFNode SpecificationSheet R06Document4 paginiAnexo 2. LLC741x RFNode SpecificationSheet R06WiracochaPiuraÎncă nu există evaluări
- Exp (3) - Active Filters - Low-Pass & High-PassDocument13 paginiExp (3) - Active Filters - Low-Pass & High-PassTony SopranoÎncă nu există evaluări
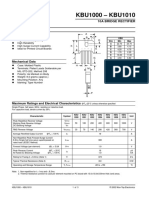
- KBU1000 - KBU1010: FeaturesDocument3 paginiKBU1000 - KBU1010: FeaturesTRUNG Lê ThànhÎncă nu există evaluări
- AVH-P4400BH AVH-P3400BH AVH-P2400BT AVH-P1400DVD: Owner's ManualDocument112 paginiAVH-P4400BH AVH-P3400BH AVH-P2400BT AVH-P1400DVD: Owner's ManualKevin WatwoodÎncă nu există evaluări
- A - Theory - Course Diary - Odd Semester - 2022 - 23 - Google Forms-1Document4 paginiA - Theory - Course Diary - Odd Semester - 2022 - 23 - Google Forms-1Anikendu MaitraÎncă nu există evaluări
- 3GPP TS 29.060: Technical SpecificationDocument153 pagini3GPP TS 29.060: Technical Specificationacer_7Încă nu există evaluări
- Fruit ArmaDocument4 paginiFruit ArmaDana CanfieldÎncă nu există evaluări
- 30 LG LED TV Case HistoriesDocument8 pagini30 LG LED TV Case Historiesluispider74Încă nu există evaluări
- MA5694 & MA5698 V800R313C00 Product DescriptionDocument44 paginiMA5694 & MA5698 V800R313C00 Product Descriptiongold kingÎncă nu există evaluări
- Technical Product Guide: Tricon SystemsDocument78 paginiTechnical Product Guide: Tricon SystemsAngela FasuyiÎncă nu există evaluări
- Minerva Control PanelDocument4 paginiMinerva Control Panellucas barriosÎncă nu există evaluări