S-ar putea să vă placă și
- Water Absorption Coefficient As A Performance Characteristic of Building Mixes Containing Fine Particles of Selected Recycled MaterialsDocument10 paginiWater Absorption Coefficient As A Performance Characteristic of Building Mixes Containing Fine Particles of Selected Recycled MaterialsbatteekhÎncă nu există evaluări
- Calculation of Thermal Bridges in Various European CountriesDocument7 paginiCalculation of Thermal Bridges in Various European CountriesbatteekhÎncă nu există evaluări
- CWCT - Shadow Box Technical NoteDocument1 paginăCWCT - Shadow Box Technical NotebatteekhÎncă nu există evaluări
- Water Resistive Barriers - Measuring Water ResistanceDocument28 paginiWater Resistive Barriers - Measuring Water ResistancebatteekhÎncă nu există evaluări
- 0718 - Fire Safety of Insulated Metal Wall PanelsDocument12 pagini0718 - Fire Safety of Insulated Metal Wall PanelsWilly TanÎncă nu există evaluări
- Moisture-Vapor-Transmission (Has Good Table Data p13)Document15 paginiMoisture-Vapor-Transmission (Has Good Table Data p13)batteekhÎncă nu există evaluări
- Testing of Hardened Mortar - Brief ReviewDocument5 paginiTesting of Hardened Mortar - Brief ReviewbatteekhÎncă nu există evaluări
- ENERGY PERFORMANCE OF WINDOWS - AMERICAN AND EUROPEAN WINDOW STANDARDS - Paper PDFDocument11 paginiENERGY PERFORMANCE OF WINDOWS - AMERICAN AND EUROPEAN WINDOW STANDARDS - Paper PDFbatteekhÎncă nu există evaluări
- LRFD Sound Barrier Design SpecsDocument26 paginiLRFD Sound Barrier Design SpecsbatteekhÎncă nu există evaluări
- Tapered Insulation For Roof Slope DrainageDocument34 paginiTapered Insulation For Roof Slope DrainagebatteekhÎncă nu există evaluări
- Structural Design of Laminated Glass Under Consideration of Shear CouplingDocument9 paginiStructural Design of Laminated Glass Under Consideration of Shear CouplingbatteekhÎncă nu există evaluări
- Using Design Software To Control Anchor Design - 2013 PDFDocument4 paginiUsing Design Software To Control Anchor Design - 2013 PDFbatteekhÎncă nu există evaluări
- Preventing Molds in Buildings - Moisture and CondensationDocument136 paginiPreventing Molds in Buildings - Moisture and CondensationbatteekhÎncă nu există evaluări
- Openable Glass WallsDocument6 paginiOpenable Glass WallsbatteekhÎncă nu există evaluări
- T - B - 60 - 216 - Properties of Water-Resitive Barriers - 5-2017Document1 paginăT - B - 60 - 216 - Properties of Water-Resitive Barriers - 5-2017batteekhÎncă nu există evaluări
- Segmental Concrete PavingDocument12 paginiSegmental Concrete PavingbatteekhÎncă nu există evaluări
- Berry-Systems-car-park-products - Barriers - Catalogue PDFDocument28 paginiBerry-Systems-car-park-products - Barriers - Catalogue PDFbatteekh100% (1)
- Berry Systems Car Park Products File014025Document28 paginiBerry Systems Car Park Products File014025batteekhÎncă nu există evaluări
- Glass Loading Data Sheet 7.2Document10 paginiGlass Loading Data Sheet 7.2iulistefanÎncă nu există evaluări
- Energy Performance of Windows - American and European Window Standards - PaperDocument11 paginiEnergy Performance of Windows - American and European Window Standards - PaperbatteekhÎncă nu există evaluări
- Pole FoundationDocument10 paginiPole FoundationbatteekhÎncă nu există evaluări
- C StrucDesign Iqbal Nov151Document4 paginiC StrucDesign Iqbal Nov151deviationzÎncă nu există evaluări
- Galvanizing Note1Document7 paginiGalvanizing Note1pandey008Încă nu există evaluări
- Optimization of Heat Transfer Through GlassDocument10 paginiOptimization of Heat Transfer Through GlassbatteekhÎncă nu există evaluări
- Sound Transmission Through Single, Double and Triple Glazing Glass - Experimental Report PDFDocument19 paginiSound Transmission Through Single, Double and Triple Glazing Glass - Experimental Report PDFbatteekhÎncă nu există evaluări
- Design of External Precast WallsDocument7 paginiDesign of External Precast WallsbatteekhÎncă nu există evaluări
- Pervious Concrete Pavement A Win Win System Ct032Document9 paginiPervious Concrete Pavement A Win Win System Ct032batteekhÎncă nu există evaluări
- Precast External WallsDocument15 paginiPrecast External Wallssreenivas_inÎncă nu există evaluări
- Concrete Pavers Roof Decks - Tech Spec 14 PDFDocument12 paginiConcrete Pavers Roof Decks - Tech Spec 14 PDFbatteekhÎncă nu există evaluări
- Load-Bearing Glass StructuresDocument10 paginiLoad-Bearing Glass StructuresbatteekhÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Invenio Flyer enDocument2 paginiInvenio Flyer enErcx Hijo de AlgoÎncă nu există evaluări
- Awo, Part I by Awo Fa'lokun FatunmbiDocument7 paginiAwo, Part I by Awo Fa'lokun FatunmbiodeÎncă nu există evaluări
- T2 Group4 English+for+BusinessDocument8 paginiT2 Group4 English+for+Businessshamerli Cerna OlanoÎncă nu există evaluări
- Unit 2 Module 2 Combined-1Document14 paginiUnit 2 Module 2 Combined-1api-2930012170% (2)
- CA Level 2Document50 paginiCA Level 2Cikya ComelÎncă nu există evaluări
- MultiZone Limitations and HintsDocument2 paginiMultiZone Limitations and HintsRubén Darío Becerra GalindoÎncă nu există evaluări
- B1 Editable End-of-Year TestDocument6 paginiB1 Editable End-of-Year TestSyahira Mayadi50% (2)
- Term Paper A and CDocument9 paginiTerm Paper A and CKishaloy NathÎncă nu există evaluări
- Sun God NikaDocument2 paginiSun God NikaElibom DnegelÎncă nu există evaluări
- First Aid Transportation of The InjuredDocument30 paginiFirst Aid Transportation of The InjuredMuhammad Naveed Akhtar100% (1)
- English 8 q3 w1 6 FinalDocument48 paginiEnglish 8 q3 w1 6 FinalJedidiah NavarreteÎncă nu există evaluări
- Ethics FinalsDocument22 paginiEthics FinalsEll VÎncă nu există evaluări
- LCP-027 VectraLCPDesignGuideTG AM 0613Document80 paginiLCP-027 VectraLCPDesignGuideTG AM 0613Evert100% (1)
- Feature Glance - How To Differentiate HoVPN and H-VPNDocument1 paginăFeature Glance - How To Differentiate HoVPN and H-VPNKroco gameÎncă nu există evaluări
- 42ld340h Commercial Mode Setup Guide PDFDocument59 pagini42ld340h Commercial Mode Setup Guide PDFGanesh BabuÎncă nu există evaluări
- Smashing HTML5 (Smashing Magazine Book Series)Document371 paginiSmashing HTML5 (Smashing Magazine Book Series)tommannanchery211Încă nu există evaluări
- Evidence Based Practice in Nursing Healthcare A Guide To Best Practice 3rd Edition Ebook PDFDocument62 paginiEvidence Based Practice in Nursing Healthcare A Guide To Best Practice 3rd Edition Ebook PDFwilliam.tavares69198% (50)
- Video ObservationDocument8 paginiVideo Observationapi-532202065Încă nu există evaluări
- Advantages of The CapmDocument3 paginiAdvantages of The Capmdeeparaghu6Încă nu există evaluări
- How Should We Allocate Scarce Resources Over Our Business Portfolio?Document20 paginiHow Should We Allocate Scarce Resources Over Our Business Portfolio?Vivek AryaÎncă nu există evaluări
- Water Flow Meter TypesDocument2 paginiWater Flow Meter TypesMohamad AsrulÎncă nu există evaluări
- 2002 CT Saturation and Polarity TestDocument11 pagini2002 CT Saturation and Polarity Testhashmishahbaz672100% (1)
- Project Report On HeritageDocument39 paginiProject Report On HeritageBALA YOGESH YANDAMURIÎncă nu există evaluări
- Xbox One S Retimer - TI SN65DP159 March 2020 RevisionDocument67 paginiXbox One S Retimer - TI SN65DP159 March 2020 RevisionJun Reymon ReyÎncă nu există evaluări
- Mastering American EnglishDocument120 paginiMastering American Englishmarharnwe80% (10)
- SST Vs BBTDocument7 paginiSST Vs BBTFlaxkikare100% (1)
- Green ProtectDocument182 paginiGreen ProtectLuka KosticÎncă nu există evaluări
- TSR 9440 - Ruined KingdomsDocument128 paginiTSR 9440 - Ruined KingdomsJulien Noblet100% (15)
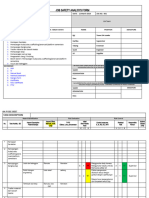
- JSA FormDocument4 paginiJSA Formfinjho839Încă nu există evaluări
- ASTM D 4437-99 Standard Practice For Determining The Integrity of Fiel Seams Used in Joining Flexible Polymeric Sheet GeomembranesDocument3 paginiASTM D 4437-99 Standard Practice For Determining The Integrity of Fiel Seams Used in Joining Flexible Polymeric Sheet GeomembranesPablo Antonio Valcárcel Vargas100% (2)