S-ar putea să vă placă și
- Mitsubishi Motors: Service ManualDocument22 paginiMitsubishi Motors: Service ManualALEJANDROÎncă nu există evaluări
- Golf No. 139 / 1: 2.5 l/110 KW - Motronic, Engine Codes BGP, BGQDocument18 paginiGolf No. 139 / 1: 2.5 l/110 KW - Motronic, Engine Codes BGP, BGQnicamarcosÎncă nu există evaluări
- Furuno Usa: A3 Gmdss Console Dealers Manual RC18xx SeriesDocument12 paginiFuruno Usa: A3 Gmdss Console Dealers Manual RC18xx SeriesJose AlvaradoÎncă nu există evaluări
- Section 6 QuizDocument33 paginiSection 6 QuizImas Rohayati100% (2)
- 96mar Coyne PDFDocument103 pagini96mar Coyne PDFdanto yuliardiÎncă nu există evaluări
- Ibiza-6k1-AQX AYP EcuDocument14 paginiIbiza-6k1-AQX AYP EcuJulien Bolly100% (1)
- Activity 2Document11 paginiActivity 2Lebron Bryant100% (1)
- Migrate MySQL Database To Azure Database For Mysql OnlineDocument11 paginiMigrate MySQL Database To Azure Database For Mysql Onlinethecoinmaniac hodlÎncă nu există evaluări
- BS 6349-2Document64 paginiBS 6349-2medianna100% (6)
- FXD RecloserControl v2 Color2Document16 paginiFXD RecloserControl v2 Color2erty ertyuÎncă nu există evaluări
- Emotron VSS Series User Manual en V1 2 (201612)Document133 paginiEmotron VSS Series User Manual en V1 2 (201612)SUDIPTA HOTA100% (1)
- Isu Fica Sap PDFDocument466 paginiIsu Fica Sap PDFAndrea Pellati100% (1)
- USB MACH3 Interface Board BL-UsbMACH-V2.1 InstructionDocument13 paginiUSB MACH3 Interface Board BL-UsbMACH-V2.1 InstructionZal80% (5)
- AMC4030-3 Axis ControllerDocument12 paginiAMC4030-3 Axis ControllerShahid SiddiqueÎncă nu există evaluări
- Mach3 Breakout Board W/ Relay & PWM: USB 5v (IN)Document12 paginiMach3 Breakout Board W/ Relay & PWM: USB 5v (IN)abrahamÎncă nu există evaluări
- 4 X 50 W Quad Bridge Car Radio Amplifier: FeatureDocument9 pagini4 X 50 W Quad Bridge Car Radio Amplifier: FeatureMerkar ElektronikÎncă nu există evaluări
- GSSF L1Document20 paginiGSSF L1Jeanpierre H. AsdikianÎncă nu există evaluări
- MX420 Program UpdateDocument4 paginiMX420 Program Updatemarkkevinmaligat03Încă nu există evaluări
- 4 X 45W Quad Bridge Car Radio Amplifier Plus HSD: 1 FeaturesDocument11 pagini4 X 45W Quad Bridge Car Radio Amplifier Plus HSD: 1 FeaturesAngel Quiñones0% (1)
- Wiring of OXDocument2 paginiWiring of OXJcMhÎncă nu există evaluări
- 2010 CC 3.6 Engine Schematic R36Document19 pagini2010 CC 3.6 Engine Schematic R36Dungani AllanÎncă nu există evaluări
- Frequency To Analogue Converter PXF-20: Signal Converters & IsolatorsDocument2 paginiFrequency To Analogue Converter PXF-20: Signal Converters & IsolatorsCiprian BuleandraÎncă nu există evaluări
- C 012 DD 2 EdDocument24 paginiC 012 DD 2 EdJose LunaÎncă nu există evaluări
- Circuit DiagramDocument1 paginăCircuit DiagramJavier JhamalÎncă nu există evaluări
- PM174 Powermeter: Quick Start GuideDocument11 paginiPM174 Powermeter: Quick Start Guideusamakhan205Încă nu există evaluări
- Dual/Quad Low Power, High Speed JFET Operational Amplifiers OP282/OP482Document16 paginiDual/Quad Low Power, High Speed JFET Operational Amplifiers OP282/OP482nicolasÎncă nu există evaluări
- Wiring Diagram: Installation IQAN-MDL2Document1 paginăWiring Diagram: Installation IQAN-MDL2feukam100% (1)
- MSD309)Document10 paginiMSD309)Adel AdelÎncă nu există evaluări
- PV PanelDocument17 paginiPV PanelMuhammad RiazÎncă nu există evaluări
- Dual/Quad Rail-to-Rail Operational Amplifiers OP295/OP495: Features Pin ConfigurationsDocument16 paginiDual/Quad Rail-to-Rail Operational Amplifiers OP295/OP495: Features Pin Configurationsabc1000Încă nu există evaluări
- 40VCBL17FQEE-IOM-06 2021 XCT7 BMSControls LonworksGatewayDocument72 pagini40VCBL17FQEE-IOM-06 2021 XCT7 BMSControls LonworksGatewayEL KEHELÎncă nu există evaluări
- USB Comm - Cable: General/Overview Wiring Schematic Mmi Ioboard PQ Amplifier Smps FilterDocument6 paginiUSB Comm - Cable: General/Overview Wiring Schematic Mmi Ioboard PQ Amplifier Smps FilterSamir SomaiyaÎncă nu există evaluări
- VfdelwDocument11 paginiVfdelwHalil YakışanÎncă nu există evaluări
- UMC22 Appendix-A 050805Document50 paginiUMC22 Appendix-A 050805yosfetÎncă nu există evaluări
- USB Comm - Cable: General/Overview Wiring Schematic Mmi Ioboard PQ Amplifier Smps FilterDocument6 paginiUSB Comm - Cable: General/Overview Wiring Schematic Mmi Ioboard PQ Amplifier Smps FilterSamir SomaiyaÎncă nu există evaluări
- MPC6585 Hardware Manual-V1.4Document5 paginiMPC6585 Hardware Manual-V1.4SHAILESH DABHAIÎncă nu există evaluări
- Load Limiter: Pinout FCI Connector (24 Ways)Document4 paginiLoad Limiter: Pinout FCI Connector (24 Ways)Ivailo ZapryanovÎncă nu există evaluări
- I/O Wiring Diagrams For The HVAC System Application: AppendixDocument18 paginiI/O Wiring Diagrams For The HVAC System Application: AppendixZerpa Rodriguez YancarlosÎncă nu există evaluări
- Click PLCDocument10 paginiClick PLCMichael PalmerÎncă nu există evaluări
- Training Material of RT49S Chassis 201406120429151Document28 paginiTraining Material of RT49S Chassis 201406120429151بوند بوند100% (1)
- TV Tabung Toshiba Model 29V13P, IC CHROMA VDP3130, IC VERTIKAL LA7845Document14 paginiTV Tabung Toshiba Model 29V13P, IC CHROMA VDP3130, IC VERTIKAL LA7845IwanÎncă nu există evaluări
- LCD Remote Annunciator - Firu006-LcdDocument2 paginiLCD Remote Annunciator - Firu006-Lcdvu thienÎncă nu există evaluări
- Wiring Diagram For Frequency Converter V2.1 PDFDocument3 paginiWiring Diagram For Frequency Converter V2.1 PDFJans Toledo ConstanzoÎncă nu există evaluări
- Depletion AlertDocument1 paginăDepletion AlertHastag NayemÎncă nu există evaluări
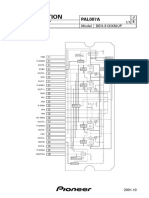
- PAL007A Pioneer PDFDocument1 paginăPAL007A Pioneer PDFWillian Jose Rosas MartinezÎncă nu există evaluări
- PAL007A PioneerDocument1 paginăPAL007A PioneerIsmael Bratti BussoloÎncă nu există evaluări
- Pal007a DatasheetDocument1 paginăPal007a DatasheetCarlos Iran Benítez MedinaÎncă nu există evaluări
- Pioneer Pal007a Datasheet PDFDocument1 paginăPioneer Pal007a Datasheet PDFroto44Încă nu există evaluări
- PAL007A Pioneer PDFDocument1 paginăPAL007A Pioneer PDFابو راشدÎncă nu există evaluări
- PAL007A Pioneer PDFDocument1 paginăPAL007A Pioneer PDFWillian Jose Rosas MartinezÎncă nu există evaluări
- PAL007A Pioneer PDFDocument1 paginăPAL007A Pioneer PDFWillian Jose Rosas MartinezÎncă nu există evaluări
- PAL007A Pioneer PDFDocument1 paginăPAL007A Pioneer PDFابو راشدÎncă nu există evaluări
- TB2946HQ: 49 W × 4-ch BTL Audio Power ICDocument18 paginiTB2946HQ: 49 W × 4-ch BTL Audio Power ICSebastian CorreaÎncă nu există evaluări
- Block Diagram 1390295Document1 paginăBlock Diagram 1390295Bobby HancockÎncă nu există evaluări
- Block Diagram 1390295Document1 paginăBlock Diagram 1390295Bobby HancockÎncă nu există evaluări
- TPS5125Document21 paginiTPS5125Shaun Dwyer Van HeerdenÎncă nu există evaluări
- TA3020 Reference Board DatasheetDocument21 paginiTA3020 Reference Board Datasheetigor_bruniÎncă nu există evaluări
- VFD-EL-W Series: Delta Sensorless Vector Control Compact DriveDocument12 paginiVFD-EL-W Series: Delta Sensorless Vector Control Compact Drivedaniel serafimÎncă nu există evaluări
- Ap3015 ADocument11 paginiAp3015 ANguyen HuanÎncă nu există evaluări
- Controlador de Factor de PotenciaDocument18 paginiControlador de Factor de PotenciaMauricio GuerreroÎncă nu există evaluări
- Ethernet Analog PLC: C0-12DRE-1-D $203.00Document12 paginiEthernet Analog PLC: C0-12DRE-1-D $203.00Javier Andres ArangoÎncă nu există evaluări
- Seminario - Mat - Guia de LabDocument1 paginăSeminario - Mat - Guia de LabAnonymous TsgakjÎncă nu există evaluări
- STB5100 Electric Wiring DiagramDocument10 paginiSTB5100 Electric Wiring Diagramsea13100% (2)
- WEG cfw500 crs232 rs232 Communication Module 10001446189 Installation Guide EnglishDocument21 paginiWEG cfw500 crs232 rs232 Communication Module 10001446189 Installation Guide EnglishRodrigoÎncă nu există evaluări
- 2CDC114083D0201 FuentesbufferabbDocument10 pagini2CDC114083D0201 FuentesbufferabbJose UcoÎncă nu există evaluări
- Manuale Sanyo Denky en PDFDocument58 paginiManuale Sanyo Denky en PDFTrung Truc NguyenÎncă nu există evaluări
- ClonixDocument8 paginiClonixNelson MartinsÎncă nu există evaluări
- TeamCenterHothouse TranscriptDocument7 paginiTeamCenterHothouse TranscripterdaltekinÎncă nu există evaluări
- Nokia Airscale Wi-Fi Module Ac210M, Release 17ADocument26 paginiNokia Airscale Wi-Fi Module Ac210M, Release 17Aprashant gauravÎncă nu există evaluări
- Autodesk Navisworks 2012 - Guia Do UsuárioDocument820 paginiAutodesk Navisworks 2012 - Guia Do UsuárioericfgÎncă nu există evaluări
- Lec 1 Introduction To Power ElectronicsDocument38 paginiLec 1 Introduction To Power ElectronicsAfiqah Zainuddin100% (1)
- Retro Internet Interface Personal Organizer For College by SlidesgoDocument55 paginiRetro Internet Interface Personal Organizer For College by SlidesgoAhda BayaniÎncă nu există evaluări
- Motto:Education Is The Best Legacy: Instructions: Choose A, B, C or D To Answer The Following Objective QuestionsDocument27 paginiMotto:Education Is The Best Legacy: Instructions: Choose A, B, C or D To Answer The Following Objective Questionsainomoh kayodeÎncă nu există evaluări
- Uptane First Whitepaper PDFDocument10 paginiUptane First Whitepaper PDFNabil AbdounÎncă nu există evaluări
- Rock Identification Using Deep Learning CNN Project Report: AbstractDocument12 paginiRock Identification Using Deep Learning CNN Project Report: AbstractAnantha PriyaÎncă nu există evaluări
- Machine Drawing Problem SheetDocument1 paginăMachine Drawing Problem SheetDeepak Gupta VlogsÎncă nu există evaluări
- KalkulyatorDocument3 paginiKalkulyatorRamiz BabayevÎncă nu există evaluări
- Graphics Tablet: Wacom Electromagnetic InductionDocument16 paginiGraphics Tablet: Wacom Electromagnetic InductionJenifer GeorgeÎncă nu există evaluări
- General Systems Theory: Subsystems or ComponentsDocument19 paginiGeneral Systems Theory: Subsystems or ComponentsBibigul BissenbayevaÎncă nu există evaluări
- ASR 2006 IntegralDocument743 paginiASR 2006 IntegralDana Buzan-AaneiÎncă nu există evaluări
- Keyword Extraction Methods From Documents in NLPDocument15 paginiKeyword Extraction Methods From Documents in NLPTridivÎncă nu există evaluări
- Click Fraud Detection: Adversarial Pattern Recognition Over 5 Years at MicrosoftDocument21 paginiClick Fraud Detection: Adversarial Pattern Recognition Over 5 Years at MicrosoftBhakti RaneÎncă nu există evaluări
- Software Engineering II - CS605 Spring 2009 Assignment 01 SolutionDocument2 paginiSoftware Engineering II - CS605 Spring 2009 Assignment 01 SolutionnnoumanÎncă nu există evaluări
- Stats Book SfuDocument354 paginiStats Book SfuDaniel Sánchez100% (1)
- GIBS Information BrochureDocument6 paginiGIBS Information BrochureshazebkhannÎncă nu există evaluări
- 3bhs212794 E01 Revn User Manual Acs6000Document266 pagini3bhs212794 E01 Revn User Manual Acs6000Fernando RamirezÎncă nu există evaluări
- Lecture1Document51 paginiLecture1Kimberley Oh100% (1)
- CH1 - Introduction To Soft Computing TechniquesDocument25 paginiCH1 - Introduction To Soft Computing Techniquesagonafer ayeleÎncă nu există evaluări