S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Trio CT2036 Jaw Crusher Manual PDFDocument44 paginiTrio CT2036 Jaw Crusher Manual PDFkenoy83% (6)
- Feasibility Study OutlineDocument4 paginiFeasibility Study OutlineKim GosengÎncă nu există evaluări
- Image Dimension Measurement SystemDocument36 paginiImage Dimension Measurement SystemMadhav RajpurohitÎncă nu există evaluări
- BO GROs2019 20 (M)Document52 paginiBO GROs2019 20 (M)vijaykumar327Încă nu există evaluări
- Performance of A Fully Mechanical Parking Brake System For Passenger CarsDocument10 paginiPerformance of A Fully Mechanical Parking Brake System For Passenger CarsMadhav RajpurohitÎncă nu există evaluări
- IOPParkingbrake PDFDocument10 paginiIOPParkingbrake PDFMadhav RajpurohitÎncă nu există evaluări
- The Classic All-Rounder - Iglidur GDocument15 paginiThe Classic All-Rounder - Iglidur GMadhav RajpurohitÎncă nu există evaluări
- Domamid 6hvi4h2 BK - en TDSDocument1 paginăDomamid 6hvi4h2 BK - en TDSMadhav RajpurohitÎncă nu există evaluări
- How To Select: Measurement EquipmentDocument12 paginiHow To Select: Measurement EquipmentMadhav RajpurohitÎncă nu există evaluări
- Intro To Brakes PresentationDocument77 paginiIntro To Brakes PresentationMadhav RajpurohitÎncă nu există evaluări
- Tata Harrier BrochureDocument9 paginiTata Harrier BrochurecolourhutÎncă nu există evaluări
- Genuine Parts GMBH Inquiries To - Info@genuine-Parts - deDocument893 paginiGenuine Parts GMBH Inquiries To - Info@genuine-Parts - deMadhav RajpurohitÎncă nu există evaluări
- High Tensile Rope Wire - 2010 PDFDocument2 paginiHigh Tensile Rope Wire - 2010 PDFado31Încă nu există evaluări
- Identification of Plastics .Document42 paginiIdentification of Plastics .Madhav RajpurohitÎncă nu există evaluări
- Young. Premium. Fun: The All New TIAGODocument4 paginiYoung. Premium. Fun: The All New TIAGOSuraj KondekarÎncă nu există evaluări
- The Classic All-Rounder - Iglidur GDocument15 paginiThe Classic All-Rounder - Iglidur GMadhav RajpurohitÎncă nu există evaluări
- Structure and FeaturesDocument8 paginiStructure and FeaturesMadhav RajpurohitÎncă nu există evaluări
- Intro To Brakes PresentationDocument77 paginiIntro To Brakes PresentationMadhav RajpurohitÎncă nu există evaluări
- A Sad Story of Artificial Animal in Natural Environment ..: IC Engine EmissionsDocument32 paginiA Sad Story of Artificial Animal in Natural Environment ..: IC Engine EmissionsVaratharaju NamakkalÎncă nu există evaluări
- Rozaini 2013 IOP Conf. Ser. Mater. Sci. Eng. 50 012006 PDFDocument9 paginiRozaini 2013 IOP Conf. Ser. Mater. Sci. Eng. 50 012006 PDFMadhav RajpurohitÎncă nu există evaluări
- HB RopeDocument104 paginiHB Ropemuhammad-ahmed-salman-2537Încă nu există evaluări
- POM - KEPITAL F20-03 - Standard GradeDocument2 paginiPOM - KEPITAL F20-03 - Standard GradeMadhav RajpurohitÎncă nu există evaluări
- Rozaini 2013 IOP Conf. Ser. Mater. Sci. Eng. 50 012006 PDFDocument9 paginiRozaini 2013 IOP Conf. Ser. Mater. Sci. Eng. 50 012006 PDFMadhav RajpurohitÎncă nu există evaluări
- High Tensile Rope Wire - 2010 PDFDocument2 paginiHigh Tensile Rope Wire - 2010 PDFado31Încă nu există evaluări
- Design & Analysis of Parking Brake System of CarDocument13 paginiDesign & Analysis of Parking Brake System of CarMadhav RajpurohitÎncă nu există evaluări
- Threaded Fasteners For Plastics enDocument38 paginiThreaded Fasteners For Plastics enMadhav Rajpurohit100% (1)
- Max Rec Tightening TorqueDocument1 paginăMax Rec Tightening TorqueMadhav RajpurohitÎncă nu există evaluări
- Medium Tensile Steel A Is I 1045Document2 paginiMedium Tensile Steel A Is I 1045Madhav RajpurohitÎncă nu există evaluări
- Guidelines For New Entrants To Motor SportsDocument3 paginiGuidelines For New Entrants To Motor SportsMadhav RajpurohitÎncă nu există evaluări
- Iso 2768-1Document6 paginiIso 2768-1Madhav RajpurohitÎncă nu există evaluări
- Injection MouldingDocument4 paginiInjection MouldingMadhav RajpurohitÎncă nu există evaluări
- Sir Josiah Stamp, The Science of Social AdjustmentDocument191 paginiSir Josiah Stamp, The Science of Social Adjustmentmaivin2Încă nu există evaluări
- The Use of Electrical Resistivity Tomography (ERT) To Delineate W PDFDocument76 paginiThe Use of Electrical Resistivity Tomography (ERT) To Delineate W PDFConstantin UngureanuÎncă nu există evaluări
- TrainingGuide Geomatica 1 2017Document132 paginiTrainingGuide Geomatica 1 2017sam.scribdÎncă nu există evaluări
- Orientation, Training and Development, and Career Planning: Chapter ObjectivesDocument17 paginiOrientation, Training and Development, and Career Planning: Chapter ObjectiveslinhÎncă nu există evaluări
- Finalize Resume - ZetyDocument2 paginiFinalize Resume - ZetyAlok KulkarniÎncă nu există evaluări
- Optimization Module For Abaqus/CAE Based On Genetic AlgorithmDocument1 paginăOptimization Module For Abaqus/CAE Based On Genetic AlgorithmSIMULIACorpÎncă nu există evaluări
- ProgrammingDocument622 paginiProgrammingwespinoaÎncă nu există evaluări
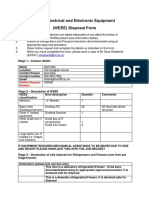
- Waste Electrical and Electronic Equipment (WEEE) Disposal FormDocument2 paginiWaste Electrical and Electronic Equipment (WEEE) Disposal FormJake HurleyÎncă nu există evaluări
- WHITECROFT Energy Directive BrochureDocument32 paginiWHITECROFT Energy Directive BrochureAriel TambisÎncă nu există evaluări
- Kriging InterpolationDocument49 paginiKriging InterpolationJimmy MaharadjaÎncă nu există evaluări
- MBTI StepDocument21 paginiMBTI StepRedgie G. GabaneÎncă nu există evaluări
- CDP Ex77Document36 paginiCDP Ex77bilenelectronics6338Încă nu există evaluări
- Servomotor PptsDocument26 paginiServomotor Pptsjasdeep_kour236066Încă nu există evaluări
- Gold Exp C1 U4 Lang Test BDocument2 paginiGold Exp C1 U4 Lang Test Bmaituti1Încă nu există evaluări
- What Are You Going To Do Today?: Learning ObjectivesDocument10 paginiWhat Are You Going To Do Today?: Learning ObjectivesMaryantiÎncă nu există evaluări
- MOUNTAINDocument8 paginiMOUNTAINlara_sin_crof6873Încă nu există evaluări
- Environment OotDocument19 paginiEnvironment OotMonojoy BanerjeeÎncă nu există evaluări
- Phillips Et Al 2002 Positive MoodDocument11 paginiPhillips Et Al 2002 Positive MoodmechagirlÎncă nu există evaluări
- Code of Ethics in Public Relations 01Document14 paginiCode of Ethics in Public Relations 01dfddtrdgffd100% (1)
- IBPS IT Officer Model Questions Computer MIcroprocessor and Assembly Language MCQ Question BankDocument146 paginiIBPS IT Officer Model Questions Computer MIcroprocessor and Assembly Language MCQ Question BankNaveen KrishnanÎncă nu există evaluări
- 160W002GB Brochure ColormixDocument40 pagini160W002GB Brochure ColormixPaky PakicÎncă nu există evaluări
- JD of HSE LO MD Abdullah Al ZamanDocument2 paginiJD of HSE LO MD Abdullah Al ZamanRAQIB 2025Încă nu există evaluări
- Math - MAA Problem Series List PDFDocument2 paginiMath - MAA Problem Series List PDFadasdÎncă nu există evaluări
- Free W3 Blog TemplateDocument4 paginiFree W3 Blog TemplateMaseko CharuzuÎncă nu există evaluări
- Samuel Amirtharaj - Evangelistic Sermon4Document5 paginiSamuel Amirtharaj - Evangelistic Sermon4Samuel DavidÎncă nu există evaluări
- Celebrity Culture Reader Paper AnnieDocument17 paginiCelebrity Culture Reader Paper AnnieAn NguyenÎncă nu există evaluări
- AI Learning ResourcesDocument6 paginiAI Learning Resourcesrip asawÎncă nu există evaluări