S-ar putea să vă placă și
- Communication, Timing, Interaction DiagramsDocument6 paginiCommunication, Timing, Interaction DiagramsNhungÎncă nu există evaluări
- Unit - II Notes-1Document60 paginiUnit - II Notes-1rafaykhaja18Încă nu există evaluări
- OOAD Unit-3Document8 paginiOOAD Unit-3Trinadh MattaÎncă nu există evaluări
- Unified Modelling LanguageDocument32 paginiUnified Modelling LanguageMasanam JanardhanÎncă nu există evaluări
- Language. Simply Put, UML Is A Modern Approach To Modeling: Business Processes WorkflowsDocument24 paginiLanguage. Simply Put, UML Is A Modern Approach To Modeling: Business Processes WorkflowsNaveen KumarÎncă nu există evaluări
- Part 1: Introduction To UML (A Study)Document39 paginiPart 1: Introduction To UML (A Study)harshinnee ravichandranÎncă nu există evaluări
- Sequence DiagramDocument6 paginiSequence DiagramSujit KumarÎncă nu există evaluări
- Exp 3Document18 paginiExp 3Akash Yadav 391Încă nu există evaluări
- What Are The Five Concepts of Object Oriented LanguageDocument3 paginiWhat Are The Five Concepts of Object Oriented LanguageSakthivel GovindarajÎncă nu există evaluări
- SRS Minor AssignmentDocument9 paginiSRS Minor Assignmentshahghani khanÎncă nu există evaluări
- Timetable Distribution System: Department of Computer Science & Information TechnologyDocument43 paginiTimetable Distribution System: Department of Computer Science & Information Technologyrana usmanÎncă nu există evaluări
- Diagrams IntroductionDocument9 paginiDiagrams IntroductionHan JeeÎncă nu există evaluări
- United Modeling Language (UML) : Use Case DiagramsDocument7 paginiUnited Modeling Language (UML) : Use Case DiagramsRoshan ShresthaÎncă nu există evaluări
- UML09 Mot So So Do Khac (Communication, Timing, Interaction)Document6 paginiUML09 Mot So So Do Khac (Communication, Timing, Interaction)Duong NguyenÎncă nu există evaluări
- Use Case DiagramDocument7 paginiUse Case DiagramMadhav KumarÎncă nu există evaluări
- Use of Interaction Diagram For Object Oriented SystemsDocument8 paginiUse of Interaction Diagram For Object Oriented SystemsAnuragAroraÎncă nu există evaluări
- 08 System DesignDocument8 pagini08 System Designkandregula lavanyaÎncă nu există evaluări
- Object-Oriented Analysis and Design With Applications: Unit Iii Chapter 5: NotationDocument24 paginiObject-Oriented Analysis and Design With Applications: Unit Iii Chapter 5: NotationAli JamaÎncă nu există evaluări
- Interaction DiagramsDocument43 paginiInteraction DiagramsIsha ThakreÎncă nu există evaluări
- Uml Lab ManualDocument68 paginiUml Lab ManualerkomalÎncă nu există evaluări
- Study On Rational Rose: Use-Case DiagramDocument4 paginiStudy On Rational Rose: Use-Case DiagramSedhu RamanÎncă nu există evaluări
- Unit-3 Notes SE Part-IIIDocument5 paginiUnit-3 Notes SE Part-IIIsunnyvemulavadatrynow6506Încă nu există evaluări
- What Is A UML Class DiagramDocument15 paginiWhat Is A UML Class DiagramManish AgrawalÎncă nu există evaluări
- Practical 8Document8 paginiPractical 8geet.more15Încă nu există evaluări
- Case Tools Record1Document107 paginiCase Tools Record1balakarthick000Încă nu există evaluări
- UML Difference FAQs-1Document2 paginiUML Difference FAQs-1Umar AliÎncă nu există evaluări
- Activity DiagramDocument16 paginiActivity DiagramRonnie EdecÎncă nu există evaluări
- Ooad 4Document21 paginiOoad 4EXAMCELL - H4Încă nu există evaluări
- Unit-Iv Basic Behavioral Modeling-IDocument14 paginiUnit-Iv Basic Behavioral Modeling-IRAJU GIRUKAÎncă nu există evaluări
- Create LyDocument14 paginiCreate LyzeyyahjiÎncă nu există evaluări
- UNIT-4: Chapter-18 Interaction DiagramsDocument26 paginiUNIT-4: Chapter-18 Interaction DiagramsbhargaviÎncă nu există evaluări
- Ooad Lab Final Manual1Document232 paginiOoad Lab Final Manual1dina27nov100% (4)
- OOSEDocument35 paginiOOSEGaurav Arora100% (1)
- Unified Modeling Language: SpecifyingDocument12 paginiUnified Modeling Language: SpecifyingMounikaÎncă nu există evaluări
- OOAD - Ex 1, 2 & 3Document32 paginiOOAD - Ex 1, 2 & 3Selva KanmaniÎncă nu există evaluări
- Structural Diagrams: Class DiagramDocument12 paginiStructural Diagrams: Class DiagramB happyÎncă nu există evaluări
- UML Collaboration DiagramDocument5 paginiUML Collaboration DiagramKarthiÎncă nu există evaluări
- Software Designing and Architecture: Lab ManualDocument4 paginiSoftware Designing and Architecture: Lab ManualfarhadkhanÎncă nu există evaluări
- Use Case Model: UML Behavioural DiagramsDocument9 paginiUse Case Model: UML Behavioural DiagramsAlvo KamauÎncă nu există evaluări
- Study Experiment OOAD LabDocument14 paginiStudy Experiment OOAD Labthebhas1954Încă nu există evaluări
- 8.4. Examining Other UML DiagramsDocument13 pagini8.4. Examining Other UML DiagramsDeep AdhikaryÎncă nu există evaluări
- Practical 1: Aim: To Study and Create Use-Case Diagram Theory: Use-Case DiagramDocument35 paginiPractical 1: Aim: To Study and Create Use-Case Diagram Theory: Use-Case DiagramVaishali Amol KorgaonkarÎncă nu există evaluări
- SDA Lab 5Document24 paginiSDA Lab 5Ali razaÎncă nu există evaluări
- Lecture Notes 1.3.6Document13 paginiLecture Notes 1.3.6Ashutosh mishraÎncă nu există evaluări
- Uml DiagramDocument20 paginiUml DiagramRasesh ShahÎncă nu există evaluări
- Diagrams, Views, and ModelsDocument22 paginiDiagrams, Views, and ModelsGurpreet SinghÎncă nu există evaluări
- Cs2357-Ooad Lab ManualDocument199 paginiCs2357-Ooad Lab ManualMohammed Thawfeeq0% (1)
- Uml For DevelopersDocument6 paginiUml For DevelopersJOAOÎncă nu există evaluări
- OOSEDocument33 paginiOOSEAMAN BHARDWAJÎncă nu există evaluări
- 1-What Is The Difference Between Sequence Diagram and Communication Diagram in UML?Document8 pagini1-What Is The Difference Between Sequence Diagram and Communication Diagram in UML?Husam ShujaadiinÎncă nu există evaluări
- Uml Unit-2Document36 paginiUml Unit-2vamsi kiranÎncă nu există evaluări
- UML Object Diagrams and Activity DiagramsDocument17 paginiUML Object Diagrams and Activity DiagramsmwendwashyleenÎncă nu există evaluări
- 1.6-Types of UML DiagramsDocument8 pagini1.6-Types of UML DiagramsUmar FarooqÎncă nu există evaluări
- Practical-6 Sequence Diagram: Online Voting SystemDocument4 paginiPractical-6 Sequence Diagram: Online Voting SystemNipun DesaiÎncă nu există evaluări
- UML Lab ManualDocument56 paginiUML Lab ManualAnonymous M9NDXtI5dÎncă nu există evaluări
- UML Diagrams ConceptsDocument20 paginiUML Diagrams ConceptstomÎncă nu există evaluări
- Aqua Connect - Farm Management - Coding AssignmentDocument2 paginiAqua Connect - Farm Management - Coding AssignmentJayachandra JcÎncă nu există evaluări
- Jayachandra Resume JavaDocument2 paginiJayachandra Resume JavaJayachandra JcÎncă nu există evaluări
- Linear Functions From The Numerical Point of View: EnabledDocument5 paginiLinear Functions From The Numerical Point of View: EnabledJayachandra JcÎncă nu există evaluări
- Python SET 2Document2 paginiPython SET 2Jayachandra JcÎncă nu există evaluări
- Ym0654 Tax - PNL 2019 04 01 2020 03 31Document52 paginiYm0654 Tax - PNL 2019 04 01 2020 03 31Jayachandra JcÎncă nu există evaluări
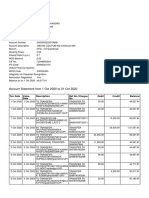
- Account Statement From 1 Oct 2020 To 31 Oct 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument3 paginiAccount Statement From 1 Oct 2020 To 31 Oct 2020: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceJayachandra JcÎncă nu există evaluări
- Primary Skills: Java, Python, Django Framework, Django Rest Framework, Angular2, Mysql, TeradataDocument2 paginiPrimary Skills: Java, Python, Django Framework, Django Rest Framework, Angular2, Mysql, TeradataJayachandra JcÎncă nu există evaluări
- 1601964523144jhuekF2v7OtJs113 PDFDocument2 pagini1601964523144jhuekF2v7OtJs113 PDFJayachandra JcÎncă nu există evaluări
- RaptorDocument27 paginiRaptorJayachandra JcÎncă nu există evaluări
- StrategiesDocument1 paginăStrategiesJayachandra JcÎncă nu există evaluări
- QuestionsDocument4 paginiQuestionsJayachandra JcÎncă nu există evaluări
- Tax Saving Particulars 2015-16-1Document2 paginiTax Saving Particulars 2015-16-1Jayachandra JcÎncă nu există evaluări
- NoDejs Notes For ProfessionalsDocument1 paginăNoDejs Notes For ProfessionalsJayachandra JcÎncă nu există evaluări
- InfixDocument2 paginiInfixJayachandra JcÎncă nu există evaluări
- What Is TeradataDocument7 paginiWhat Is TeradataJayachandra JcÎncă nu există evaluări
- Android StudioDocument34 paginiAndroid StudioJayachandra Jc100% (1)
- C Day - 2 Topics Covered 1. Pointers 2. Structures 3. Unions 1.0 Introduction To PointersDocument17 paginiC Day - 2 Topics Covered 1. Pointers 2. Structures 3. Unions 1.0 Introduction To PointersJayachandra JcÎncă nu există evaluări
- Project Design: Ourse UilderDocument5 paginiProject Design: Ourse UilderJayachandra JcÎncă nu există evaluări
- Solutions Tutorial 6Document9 paginiSolutions Tutorial 6Nur Aqilah Abdullah HashimÎncă nu există evaluări
- 120-21 TM RF HandbookDocument164 pagini120-21 TM RF HandbookbaymanÎncă nu există evaluări
- ACT 2 Explanatory Answers - MathDocument27 paginiACT 2 Explanatory Answers - Mathrotat2348Încă nu există evaluări
- Breuer - Sun & Shadow (Inglés) PDFDocument18 paginiBreuer - Sun & Shadow (Inglés) PDFccorrea74Încă nu există evaluări
- Conversation Class - Video GamesDocument4 paginiConversation Class - Video GamesMaíra MouraÎncă nu există evaluări
- Wind Tunnel Technique Notes For Aeronautical Engineers TP 2Document6 paginiWind Tunnel Technique Notes For Aeronautical Engineers TP 2Ramji VeerappanÎncă nu există evaluări
- The Effect of The Gastrocnemius On The Plantar Fascia: Javier Pascual HuertaDocument18 paginiThe Effect of The Gastrocnemius On The Plantar Fascia: Javier Pascual HuertamarcelonorisÎncă nu există evaluări
- Yuasa Technical Data Sheet: The World's Leading Battery ManufacturerDocument1 paginăYuasa Technical Data Sheet: The World's Leading Battery ManufacturerAshraf Sayed ShabaanÎncă nu există evaluări
- Datasheet Double Solenoid Valve DMV 12Document7 paginiDatasheet Double Solenoid Valve DMV 12flatron445Încă nu există evaluări
- Bistable Relays RXMVB 2, RXMVB 4: FeaturesDocument4 paginiBistable Relays RXMVB 2, RXMVB 4: FeaturesGabriel Maxo PapagalloÎncă nu există evaluări
- CCR Control System Interface HandbookDocument17 paginiCCR Control System Interface Handbooklcastrey23Încă nu există evaluări
- Present Simple Present ContinuousDocument3 paginiPresent Simple Present ContinuousFernando SabinoÎncă nu există evaluări
- Links of XII Physics Investigatory Project Allowtment 2Document3 paginiLinks of XII Physics Investigatory Project Allowtment 2yashtomarsoop07Încă nu există evaluări
- MMC 16101 - Positive Displacement Pump - 01Document19 paginiMMC 16101 - Positive Displacement Pump - 01HET DEDHIAÎncă nu există evaluări
- Surface TensisonDocument28 paginiSurface TensisonJAWAD AHMAD BURTÎncă nu există evaluări
- Cloud Computing 101 TutorialDocument203 paginiCloud Computing 101 TutorialYunis Iklil100% (1)
- Pilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolDocument10 paginiPilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolCher GeriÎncă nu există evaluări
- Streets As Places - Un Habitat ReportDocument168 paginiStreets As Places - Un Habitat Reportrf88100% (7)
- A Guide To Become A Succesful Marine EngineerDocument99 paginiA Guide To Become A Succesful Marine EngineerTammam Hassan100% (1)
- Astro-Spiri Camp - Chinmaya Vibhooti - Shankar Kumaran PDFDocument10 paginiAstro-Spiri Camp - Chinmaya Vibhooti - Shankar Kumaran PDFShankar KumaranÎncă nu există evaluări
- Ai R16 - Unit-6Document36 paginiAi R16 - Unit-6RakeshÎncă nu există evaluări
- Huawei FusionServer RH2288 V3 Data Sheet PDFDocument2 paginiHuawei FusionServer RH2288 V3 Data Sheet PDFMartenMattisenÎncă nu există evaluări
- Press Releases Are Not A PR Strategy An Executive Annas ArchiveDocument200 paginiPress Releases Are Not A PR Strategy An Executive Annas Archivehelenajosemacuacua31Încă nu există evaluări
- Super 6 Comprehension StrategiesDocument1 paginăSuper 6 Comprehension StrategiesrosypatelÎncă nu există evaluări
- The 28th Santa Fe Symposium On Jewelry Manufacturing TechnologyDocument6 paginiThe 28th Santa Fe Symposium On Jewelry Manufacturing Technologyชนพัทธ์ คงพ่วงÎncă nu există evaluări
- List Katalog Fire Hydrant (Box)Document3 paginiList Katalog Fire Hydrant (Box)Sales1 mpicaÎncă nu există evaluări
- Manual of Avionics PDFDocument300 paginiManual of Avionics PDFJhony BhatÎncă nu există evaluări
- Bài Tập Bổ Trợ Nâng Cao Tiếng Anh 7-8-9 Chương Trình Mới (1) -Trang-292-433Document142 paginiBài Tập Bổ Trợ Nâng Cao Tiếng Anh 7-8-9 Chương Trình Mới (1) -Trang-292-433Nguyễn Lâm ThươngÎncă nu există evaluări
- Lesson 15 Validity of Measurement and Reliability PDFDocument3 paginiLesson 15 Validity of Measurement and Reliability PDFMarkChristianRobleAlmazanÎncă nu există evaluări
- BF V CatalogDocument56 paginiBF V CatalogmaciasrobÎncă nu există evaluări