S-ar putea să vă placă și
- 2017-ME-110 TOM LAB REPORTS FinalsDocument13 pagini2017-ME-110 TOM LAB REPORTS FinalsTayyab ShaikhÎncă nu există evaluări
- 2017-ME-110 TOM LAB REPORTS MidsDocument12 pagini2017-ME-110 TOM LAB REPORTS MidsTayyab ShaikhÎncă nu există evaluări
- EE 213 Electrical Machines Lab Manual - 2018Document58 paginiEE 213 Electrical Machines Lab Manual - 2018umair rashidÎncă nu există evaluări
- The Lab Manual Rev 5 PDFDocument219 paginiThe Lab Manual Rev 5 PDFJesrey Salazar MacaseroÎncă nu există evaluări
- Software Testing Guide Book v0.1Document110 paginiSoftware Testing Guide Book v0.1Amit RathiÎncă nu există evaluări
- Labratory Reports PDFDocument34 paginiLabratory Reports PDFZelalemBenayewÎncă nu există evaluări
- LAb ManualDocument38 paginiLAb ManualAwais AhmadÎncă nu există evaluări
- Aerospike Rocket Engine Design and DevelDocument92 paginiAerospike Rocket Engine Design and DevelAleksa TrifkovićÎncă nu există evaluări
- Physics136-1 Lab ManualDocument135 paginiPhysics136-1 Lab ManualJulius RimasÎncă nu există evaluări
- EE-361L Communication Systems Lab ManualDocument105 paginiEE-361L Communication Systems Lab ManualShahzaib NadeemÎncă nu există evaluări
- EELT Manual 2Document22 paginiEELT Manual 2Tanzeela RiazÎncă nu există evaluări
- Agility in SoccerDocument38 paginiAgility in Soccerikaa nasriÎncă nu există evaluări
- Workability and Rheology of Fresh Concrete Compendium of TestsDocument143 paginiWorkability and Rheology of Fresh Concrete Compendium of TestsWole LabiranÎncă nu există evaluări
- Circuit Analysis Lab ManualDocument108 paginiCircuit Analysis Lab ManualHamzah NaeemÎncă nu există evaluări
- Manufacturing Process Lab: Submitted ToDocument35 paginiManufacturing Process Lab: Submitted ToTauqeer MoaviaÎncă nu există evaluări
- SPECTRO XSORT EngDocument44 paginiSPECTRO XSORT EngLellypeaches EkandjoÎncă nu există evaluări
- Lab Final 9-7-19Document144 paginiLab Final 9-7-19Vivek Masaram100% (1)
- Nondestructive Examination (NDE) Technology and Codes Student Manual Introduction To Ultrasonic ExaminationDocument78 paginiNondestructive Examination (NDE) Technology and Codes Student Manual Introduction To Ultrasonic ExaminationRaj KumarÎncă nu există evaluări
- Electric Machines Lab Manual (2020)Document76 paginiElectric Machines Lab Manual (2020)IHZAM ZIAÎncă nu există evaluări
- Spectro Xsort Xhh03 EngDocument53 paginiSpectro Xsort Xhh03 Engaiurea92Încă nu există evaluări
- Department of Physics Laboratory Manual For Nuclear Physics (Phys2052)Document132 paginiDepartment of Physics Laboratory Manual For Nuclear Physics (Phys2052)Tadesse AbateÎncă nu există evaluări
- EE 416LCS Lab Manual - UpdatedDocument52 paginiEE 416LCS Lab Manual - Updatedgosek16375Încă nu există evaluări
- Selenium FrameworksDocument61 paginiSelenium FrameworksNandhalala IsaiÎncă nu există evaluări
- Spectral AnalysisDocument234 paginiSpectral AnalysisTitip Anillahi100% (1)
- Living With Nuclear Power in Britain: A Mixed-Methods StudyDocument64 paginiLiving With Nuclear Power in Britain: A Mixed-Methods StudyDaniel VenablesÎncă nu există evaluări
- Justin Johnson Lab Partner: Shaquille Fuller Experiment 2 Cascade Amplifier Design ECE 332LDocument5 paginiJustin Johnson Lab Partner: Shaquille Fuller Experiment 2 Cascade Amplifier Design ECE 332LJustin JohnsonÎncă nu există evaluări
- Ultrasonidos Manual PDFDocument78 paginiUltrasonidos Manual PDFJose Luis Gonzalez Perez100% (1)
- MATLAB Programming for Biomedical Engineers and ScientistsDe la EverandMATLAB Programming for Biomedical Engineers and ScientistsEvaluare: 4.5 din 5 stele4.5/5 (4)
- Test Report: The EMC Testing Has Been Performed On The Submitted SamplesDocument57 paginiTest Report: The EMC Testing Has Been Performed On The Submitted SamplesBrenda RicapaÎncă nu există evaluări
- Instruction Manual: Raytech Usa, IncDocument57 paginiInstruction Manual: Raytech Usa, IncRuben Dario Gutierrez MontenegroÎncă nu există evaluări
- Ivium ManualDocument363 paginiIvium ManualRecebimento de ResíduosÎncă nu există evaluări
- User Manual - ADX-HEME-310Document65 paginiUser Manual - ADX-HEME-310Sethu RamÎncă nu există evaluări
- Saso A-166Document63 paginiSaso A-166ashrafbookÎncă nu există evaluări
- SLN 1st Semccpl16-26Document79 paginiSLN 1st Semccpl16-26Rajani Nagraj S NÎncă nu există evaluări
- Electric Machines Lab Manual (2022) (1) - 1-20Document20 paginiElectric Machines Lab Manual (2022) (1) - 1-20dahmed941Încă nu există evaluări
- Maze Solving VehicleDocument92 paginiMaze Solving VehicleSheikh Ismail0% (1)
- Predicting Horse Racing Result. Using TensorFlowDocument55 paginiPredicting Horse Racing Result. Using TensorFlowJoseph BloggsÎncă nu există evaluări
- Myo Gesture Control Armband For Medical ApplicationsDocument29 paginiMyo Gesture Control Armband For Medical ApplicationsHugo David Enriquez EspinosaÎncă nu există evaluări
- Registration Seminar Report-Sriya BanerjeeDocument44 paginiRegistration Seminar Report-Sriya BanerjeeSriya BanerjeeÎncă nu există evaluări
- A1.Pilot Pioneer User Manual V10.2Document283 paginiA1.Pilot Pioneer User Manual V10.2franz2383Încă nu există evaluări
- Final Version of Draft FuturaEnergyDocument57 paginiFinal Version of Draft FuturaEnergymanjot.rattan98Încă nu există evaluări
- (Eng) Advanced Package Training Scaffolding 2011.1Document86 pagini(Eng) Advanced Package Training Scaffolding 2011.1MartinÎncă nu există evaluări
- Operating System Lab Manual PDFDocument53 paginiOperating System Lab Manual PDFNoor AlamÎncă nu există evaluări
- KANG ReportDocument102 paginiKANG ReportKhushal BhanderiÎncă nu există evaluări
- Sick Station B 22112017Document57 paginiSick Station B 22112017jorgeÎncă nu există evaluări
- Design and Analysis of An Inertial Properties Measurement Device For Manual WheelchairsDocument129 paginiDesign and Analysis of An Inertial Properties Measurement Device For Manual WheelchairsAbhishek AroraÎncă nu există evaluări
- ISaGRAF Target 5 Technical ReferenceDocument111 paginiISaGRAF Target 5 Technical ReferenceHarsha GÎncă nu există evaluări
- Coding for Penetration Testers: Building Better ToolsDe la EverandCoding for Penetration Testers: Building Better ToolsÎncă nu există evaluări
- API MPMS Chapter 8.2 Automatic Petroleum SamplingDocument3 paginiAPI MPMS Chapter 8.2 Automatic Petroleum SamplingrizkiÎncă nu există evaluări
- Eastern Mediterranean University Famagusta North - Cyprus Software Engineering DepartmentDocument52 paginiEastern Mediterranean University Famagusta North - Cyprus Software Engineering DepartmentsįleňT HĕąrťÎncă nu există evaluări
- Alkalinity Manual UpdateDocument56 paginiAlkalinity Manual UpdatetheivanayagamÎncă nu există evaluări
- Mazak Case Study PDFDocument63 paginiMazak Case Study PDFBrobrtÎncă nu există evaluări
- 16CP052 CP446 AmsDocument57 pagini16CP052 CP446 Amsayanaman001Încă nu există evaluări
- Practical Process Control for Engineers and TechniciansDe la EverandPractical Process Control for Engineers and TechniciansEvaluare: 5 din 5 stele5/5 (3)
- 2019-09-12 - Diploma in Mechanical Engineering Revised 2014Document159 pagini2019-09-12 - Diploma in Mechanical Engineering Revised 2014Sourav KumarÎncă nu există evaluări
- Fluid Mechanics Lab ManualDocument81 paginiFluid Mechanics Lab ManualJunaid BangashÎncă nu există evaluări
- Machine Design Standards History and ImpactDocument12 paginiMachine Design Standards History and ImpactMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- TitleDocument11 paginiTitleMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- Review of Intl Design StandardsDocument4 paginiReview of Intl Design StandardsQazi MaazÎncă nu există evaluări
- Furnace Control SystemDocument9 paginiFurnace Control SystemMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- By: M. Asjad Aamir (2016-ME-10) Umar Imtiaz (2016-ME-11) Naeemullah (2016-ME-12)Document20 paginiBy: M. Asjad Aamir (2016-ME-10) Umar Imtiaz (2016-ME-11) Naeemullah (2016-ME-12)MUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
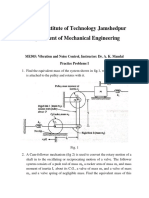
- ME34ME505 - Vibration and Noise ControlPractice Problems IDocument20 paginiME34ME505 - Vibration and Noise ControlPractice Problems IMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- Furnace Control SystemDocument9 paginiFurnace Control SystemMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- Cad Real Final PDFDocument11 paginiCad Real Final PDFMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- Part3-Static 1-BenchMark-SolverDocument1 paginăPart3-Static 1-BenchMark-SolverMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- Auto CAD Drawing: Submitted byDocument11 paginiAuto CAD Drawing: Submitted byMUHAMMAD ASJAD AAMIR AAMIR AMINÎncă nu există evaluări
- LUFKIN - Manual General PDFDocument64 paginiLUFKIN - Manual General PDFy149487Încă nu există evaluări
- Force, Energy and Simple MachinesDocument3 paginiForce, Energy and Simple MachinesAlya Safira100% (1)
- Operation Manual 683 V 11 PDFDocument170 paginiOperation Manual 683 V 11 PDFEricson ViaÎncă nu există evaluări
- Portable Pneumatic Equipment Statutory RequirementsDocument9 paginiPortable Pneumatic Equipment Statutory RequirementsUzoma FrancisÎncă nu există evaluări
- HermannUltrasonicsDialogSpeed ControlDocument20 paginiHermannUltrasonicsDialogSpeed ControlUrielMGÎncă nu există evaluări
- HSM01 A133900066MS Product OverviewIDocument33 paginiHSM01 A133900066MS Product OverviewIjokoÎncă nu există evaluări
- Sunward SWE08B Operator's ManualDocument96 paginiSunward SWE08B Operator's ManualIisakki50% (2)
- BMN Automation 2023 enDocument40 paginiBMN Automation 2023 enВладимирÎncă nu există evaluări
- XXXX Evacuation Area ESDocument45 paginiXXXX Evacuation Area ESRifatAlAhmedÎncă nu există evaluări
- 5TPH Mobile Seed Cleaning MachineDocument7 pagini5TPH Mobile Seed Cleaning MachinevillegasfrankieÎncă nu există evaluări
- IEEE Device Function and Definitions ExplainedDocument54 paginiIEEE Device Function and Definitions ExplainedRay BaculoÎncă nu există evaluări
- Sany Rotary Drilling Rig SR285Document14 paginiSany Rotary Drilling Rig SR285Thanh Cong100% (2)
- 01 HistoryDocument12 pagini01 HistoryJefferson MagallanesÎncă nu există evaluări
- IT Era LMS 1Document4 paginiIT Era LMS 1Mherie Joy Cantos GutierrezÎncă nu există evaluări
- Brushing UnitDocument27 paginiBrushing UnitKhandaker Sakib FarhadÎncă nu există evaluări
- Control of Electric Drives Speed and MotionDocument28 paginiControl of Electric Drives Speed and Motionbhagchandt817Încă nu există evaluări
- Toyoda Air Jet Looms and Water Jet Looms InventoryDocument2 paginiToyoda Air Jet Looms and Water Jet Looms InventoryMukti GunawanÎncă nu există evaluări
- Bearing Condition Analyser BVT 110Document1 paginăBearing Condition Analyser BVT 110industrialindia1Încă nu există evaluări
- Manual Instalacion ATV31HDocument17 paginiManual Instalacion ATV31HJWVAÎncă nu există evaluări
- A Method For Thermal Analysis of Spiral Bevel GearsDocument8 paginiA Method For Thermal Analysis of Spiral Bevel Gearsvishal raiyaniÎncă nu există evaluări
- Simple Machines4Document3 paginiSimple Machines4Daryl OribiadaÎncă nu există evaluări
- Mechatronics Question BankDocument11 paginiMechatronics Question Banknaveeth11100% (2)
- Introduction to Hydraulics and PneumaticsDocument17 paginiIntroduction to Hydraulics and PneumaticsTanweerÎncă nu există evaluări
- Gear Solutions 0209Document56 paginiGear Solutions 0209rrudra2100% (1)
- 2 - Driver ManualDocument76 pagini2 - Driver ManualJokoÎncă nu există evaluări
- Jss 2 Basic Technology JSS 2 Third Term Examination - Marvel LearnDocument1 paginăJss 2 Basic Technology JSS 2 Third Term Examination - Marvel LearnTriple Jay COCÎncă nu există evaluări
- 1-Tritone 1800 Pre-ShredderDocument119 pagini1-Tritone 1800 Pre-ShredderRobert BrannonÎncă nu există evaluări
- TA202A Manufacturing Processes II: Overview of The Plan For The CourseDocument13 paginiTA202A Manufacturing Processes II: Overview of The Plan For The CourseAryann kumarÎncă nu există evaluări
- Quantum Bots Engineering NotebookDocument82 paginiQuantum Bots Engineering NotebookNivesh Programming and GamingÎncă nu există evaluări
- Company Profile: Construction EquipmentDocument32 paginiCompany Profile: Construction EquipmentMA TotalforkliftÎncă nu există evaluări