S-ar putea să vă placă și
- Chapter 2 How Organizations Use ICT 1Document27 paginiChapter 2 How Organizations Use ICT 1Arpan JhaÎncă nu există evaluări
- Design and Implementation of Automatic RDocument7 paginiDesign and Implementation of Automatic RcabdimaalikscmÎncă nu există evaluări
- 26 Article - Text 27 1 10 2019102520191030 58593 1hrobox With Cover Page v2Document8 pagini26 Article - Text 27 1 10 2019102520191030 58593 1hrobox With Cover Page v2Fitrah Huseini AziziÎncă nu există evaluări
- Tizzy SeminarDocument12 paginiTizzy SeminarToheebdareÎncă nu există evaluări
- Tizzy SeminarDocument12 paginiTizzy SeminarToheebdareÎncă nu există evaluări
- 1.2 Background of The ProjectDocument4 pagini1.2 Background of The ProjectToheebdare100% (1)
- Design and Implementation of RF Remote Temperature Speed Controlled Fan PublishedDocument8 paginiDesign and Implementation of RF Remote Temperature Speed Controlled Fan PublishedjocianvefÎncă nu există evaluări
- PID ControllersDocument9 paginiPID Controllerszs94qjqcx7Încă nu există evaluări
- Class Notes - As Unit 3Document4 paginiClass Notes - As Unit 3aqsaleemÎncă nu există evaluări
- Temperature Controlled DC Fan by Using 8051 MicrocontrollerDocument5 paginiTemperature Controlled DC Fan by Using 8051 MicrocontrollerVarun KumarÎncă nu există evaluări
- RIDWAN'S COMPLETE PROJECT (CHPT 1-5) - CorrectedDocument22 paginiRIDWAN'S COMPLETE PROJECT (CHPT 1-5) - CorrectedRidwanÎncă nu există evaluări
- Project Report: Water Temperature ControllerDocument13 paginiProject Report: Water Temperature ControllerMuhammad OmerÎncă nu există evaluări
- Building Controls I - An Introduction To Building Controls-TranscriptDocument11 paginiBuilding Controls I - An Introduction To Building Controls-Transcriptjacksonli100% (1)
- PDD ProjectDocument30 paginiPDD ProjectIsrarul HaqueÎncă nu există evaluări
- Introduction To Programmable Logic ControllersRev2Document43 paginiIntroduction To Programmable Logic ControllersRev2apelokayaÎncă nu există evaluări
- Control EngineeringDocument7 paginiControl Engineeringuet158Încă nu există evaluări
- 000 Digital Control LecturesDocument67 pagini000 Digital Control LecturesPX PRÎncă nu există evaluări
- PC Based Industrial Automation With AVR Atmega 16 - Project ReportDocument33 paginiPC Based Industrial Automation With AVR Atmega 16 - Project ReportRobo IndiaÎncă nu există evaluări
- Q1: Explain Sensor and Actuator in Detail. Ans: - SensorsDocument31 paginiQ1: Explain Sensor and Actuator in Detail. Ans: - SensorsParimal DeshmukhÎncă nu există evaluări
- Control and Robotics: IndexDocument12 paginiControl and Robotics: IndexescriboalprofeÎncă nu există evaluări
- My Presentation of My ProposalDocument34 paginiMy Presentation of My ProposalDiana FernandezÎncă nu există evaluări
- 6 Engine Computer Systems2Document36 pagini6 Engine Computer Systems2Khairulz AnuarÎncă nu există evaluări
- Pavan Kumar Mini ProjectDocument53 paginiPavan Kumar Mini ProjectPavankumar KalliÎncă nu există evaluări
- Super Final ThesisDocument72 paginiSuper Final ThesisRiyhad F. TamayoÎncă nu există evaluări
- Pavan Kumar Mini ProjectDocument53 paginiPavan Kumar Mini ProjectPavankumar KalliÎncă nu există evaluări
- Tracking FanDocument19 paginiTracking FanVikrant Singh ChandelÎncă nu există evaluări
- Automatic Fan Control Techniques Trends in Cooling High-Speed ChipsDocument6 paginiAutomatic Fan Control Techniques Trends in Cooling High-Speed ChipsAdeyinka AdeolaÎncă nu există evaluări
- Scada Project 1326860164Document86 paginiScada Project 1326860164Kamran KhanÎncă nu există evaluări
- Group 5.full Report Control EngineeringDocument21 paginiGroup 5.full Report Control Engineeringputri farrahÎncă nu există evaluări
- Design and Implementation of An Industrial Heat Detector and Cooling System Using Raspberry PiDocument11 paginiDesign and Implementation of An Industrial Heat Detector and Cooling System Using Raspberry PiezeÎncă nu există evaluări
- FamiDocument17 paginiFamiCherinet GashawÎncă nu există evaluări
- Automatic Bottle FillingDocument41 paginiAutomatic Bottle FillingSanjana Singh100% (1)
- Construction of A Temperature ControlledDocument5 paginiConstruction of A Temperature ControlledcabdimaalikscmÎncă nu există evaluări
- Automatic Bottle Filling and Capping Control SystemDocument41 paginiAutomatic Bottle Filling and Capping Control Systemmahderina_218241157100% (12)
- Design and Development of Arduino Based Automatic Fan Control System Using PIR and LM 35 SensorDocument12 paginiDesign and Development of Arduino Based Automatic Fan Control System Using PIR and LM 35 SensorEzekiel Dela Pena0% (1)
- ChapterDocument11 paginiChapterMuthu PandiÎncă nu există evaluări
- Automatic Ventilation SystemDocument69 paginiAutomatic Ventilation SystemGurram SaiTejaÎncă nu există evaluări
- Automatic Bottle Filling and Capping Control SystemDocument41 paginiAutomatic Bottle Filling and Capping Control SystemoscarÎncă nu există evaluări
- SynopsisDocument6 paginiSynopsisPooja GÎncă nu există evaluări
- Close & Open Loop SystemDocument6 paginiClose & Open Loop SystemAdonis NicolasÎncă nu există evaluări
- Research Article Arduino and Labview Based Control For Efficient Drive of Cooling Fan SystemDocument10 paginiResearch Article Arduino and Labview Based Control For Efficient Drive of Cooling Fan SystemnaveenÎncă nu există evaluări
- Aparent ProjectDocument14 paginiAparent ProjectbernabasÎncă nu există evaluări
- Project PPT Varun KR PandeyDocument18 paginiProject PPT Varun KR Pandeyvarun pandey 1065Încă nu există evaluări
- Digital Control (Unit-1)Document52 paginiDigital Control (Unit-1)osantqvrzxÎncă nu există evaluări
- Kwame Nkrumah University of Science and TechnologyDocument65 paginiKwame Nkrumah University of Science and TechnologyericparggahÎncă nu există evaluări
- Me 2401 Mechatronics Unit 1 NotesDocument60 paginiMe 2401 Mechatronics Unit 1 NotesSivagami PunithavathiÎncă nu există evaluări
- Chapter-1Document4 paginiChapter-1Bts ArmyÎncă nu există evaluări
- Industrial PLCDocument7 paginiIndustrial PLCHuỳnh Thiệu HàoÎncă nu există evaluări
- Temprature Fan Speed ControlDocument49 paginiTemprature Fan Speed ControlJohnson0% (1)
- Fan Regulator Using 8051 MicrocontrollerDocument2 paginiFan Regulator Using 8051 MicrocontrollerSatyam LalaÎncă nu există evaluări
- PE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Document76 paginiPE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Charlton S.InaoÎncă nu există evaluări
- DTMF Home Contorol SystemDocument12 paginiDTMF Home Contorol SystemTapan Kumar MohantaÎncă nu există evaluări
- Industrial Temp ControlDocument17 paginiIndustrial Temp ControlPooja GÎncă nu există evaluări
- Me2009 - Control System Technology Lab Assignment 2: Hochiminh City University of Technology Mechatronics DepartmentDocument3 paginiMe2009 - Control System Technology Lab Assignment 2: Hochiminh City University of Technology Mechatronics DepartmentNHÂN NGUYỄN HỮUÎncă nu există evaluări
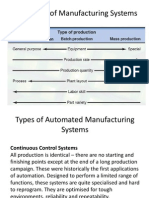
- Automated Manufacturing SystemsDocument25 paginiAutomated Manufacturing SystemsSoto KunÎncă nu există evaluări
- Optimization of Performance of Vapor Compression Refrigeration System (VCRS) by Controlling The Motor Fan of The EvaporatorDocument7 paginiOptimization of Performance of Vapor Compression Refrigeration System (VCRS) by Controlling The Motor Fan of The Evaporatorzulkifli aminÎncă nu există evaluări
- Hanafi2018 PDFDocument7 paginiHanafi2018 PDFatheerÎncă nu există evaluări
- Final Year ProjectDocument4 paginiFinal Year ProjectZain RiazÎncă nu există evaluări
- Welrod Silenced PistolDocument2 paginiWelrod Silenced Pistolblowmeasshole1911Încă nu există evaluări
- Massimo Cacciari, 1994. The Necessary AngelDocument133 paginiMassimo Cacciari, 1994. The Necessary AngelAbner J ColmenaresÎncă nu există evaluări
- Anti-Cellulite: Endermologie TreatmentDocument8 paginiAnti-Cellulite: Endermologie TreatmentMinu CatalinÎncă nu există evaluări
- (Q2) Electrochemistry 29th JulyDocument21 pagini(Q2) Electrochemistry 29th JulySupritam KunduÎncă nu există evaluări
- Indian Standard: Methods of Chemical Testing of LeatherDocument75 paginiIndian Standard: Methods of Chemical Testing of LeatherAshish DixitÎncă nu există evaluări
- Ar ExportsDocument1 paginăAr ExportsRais AlamÎncă nu există evaluări
- EclipseDocument6 paginiEclipsetoncipÎncă nu există evaluări
- tmpE0D4 TMPDocument7 paginitmpE0D4 TMPFrontiersÎncă nu există evaluări
- Instant Download Professional Nursing Practice Concepts Perspectives 7th Blais Hayes Test Bank PDF ScribdDocument32 paginiInstant Download Professional Nursing Practice Concepts Perspectives 7th Blais Hayes Test Bank PDF ScribdDanielle Searfoss100% (10)
- Eureka Forbes ReportDocument75 paginiEureka Forbes ReportUjjval Jain0% (1)
- Tabla QuimicaDocument12 paginiTabla QuimicaPablo PasqualiniÎncă nu există evaluări
- 31. (NÂNG CAO) Đề soạn theo cấu trúc minh họa 2021 - Tiếng Anh - Đề 31 - DươngDocument15 pagini31. (NÂNG CAO) Đề soạn theo cấu trúc minh họa 2021 - Tiếng Anh - Đề 31 - DươngNguyễn Quế Anh100% (1)
- My Family (Speaking Cards)Document1 paginăMy Family (Speaking Cards)Maria Marynuch100% (1)
- Carbon Emissions Don't Cause Global Warming: BackgroundDocument5 paginiCarbon Emissions Don't Cause Global Warming: BackgroundLibertyAustraliaÎncă nu există evaluări
- Intro To BiochemDocument2 paginiIntro To BiochemPeachy PieÎncă nu există evaluări
- Agricultural Machinery in PakistanDocument19 paginiAgricultural Machinery in PakistanBadar NiaziÎncă nu există evaluări
- Density-Based Methods: DBSCAN: Density-Based Clustering Based On Connected Regions With High DensityDocument3 paginiDensity-Based Methods: DBSCAN: Density-Based Clustering Based On Connected Regions With High DensityKingzlynÎncă nu există evaluări
- Local AnesthesiaDocument55 paginiLocal AnesthesiaAhmed MagdyÎncă nu există evaluări
- LESSON 2 Facilities Location StrategiesDocument2 paginiLESSON 2 Facilities Location StrategiesElle LeeÎncă nu există evaluări
- Practice Exam 3 KEY (Solutions)Document13 paginiPractice Exam 3 KEY (Solutions)joseÎncă nu există evaluări
- The Greek LettersDocument18 paginiThe Greek LettersSupreet GuptaÎncă nu există evaluări
- Contactor - SchniderDocument28 paginiContactor - SchniderPramod DixitÎncă nu există evaluări
- Atlantis Is Discovered - Atlantis in Middle Danubian Depression (Pannonian Basin) A New Location of Atlantis IslandDocument31 paginiAtlantis Is Discovered - Atlantis in Middle Danubian Depression (Pannonian Basin) A New Location of Atlantis Islandpaulct2004721260% (10)
- Podar International School (Icse) Practice Sheet STD: IX Chapter 28: Distance FormulaDocument2 paginiPodar International School (Icse) Practice Sheet STD: IX Chapter 28: Distance FormulaVanshika MehrotraÎncă nu există evaluări
- Air Cooler With Checking DoorDocument2 paginiAir Cooler With Checking DoorSuraj KumarÎncă nu există evaluări
- 8Document3 pagini8Anirban Dasgupta100% (1)
- Power SupplyDocument79 paginiPower SupplySharad KumbharanaÎncă nu există evaluări
- Dynamics Study MaterialDocument57 paginiDynamics Study Materialanik sarkerÎncă nu există evaluări
- MFI 2 - Unit 3 - SB - L+SDocument10 paginiMFI 2 - Unit 3 - SB - L+SHoan HoàngÎncă nu există evaluări
- 2nd Quarter - Summative Test in TleDocument2 pagini2nd Quarter - Summative Test in TleRachelle Ann Dizon100% (1)