S-ar putea să vă placă și
- ROBOTICS QUESTION BANK Unit I II III& IV BY MAHENDRABABU MEKALA, PBRVITS KAVALIDocument5 paginiROBOTICS QUESTION BANK Unit I II III& IV BY MAHENDRABABU MEKALA, PBRVITS KAVALIMahendra Babu Mekala61% (23)
- Square and Rectangular Louvre Face Ceiling Diffuser: Model SADocument24 paginiSquare and Rectangular Louvre Face Ceiling Diffuser: Model SARifa MuzakkiaÎncă nu există evaluări
- 5 - IoT Design LevelsDocument24 pagini5 - IoT Design LevelsNIKHIL ARORAÎncă nu există evaluări
- Ae Zg511 Course HandoutDocument4 paginiAe Zg511 Course HandoutJoel George AlexÎncă nu există evaluări
- Practical Monte Carlo Simulation with Excel - Part 2 of 2: Applications and DistributionsDe la EverandPractical Monte Carlo Simulation with Excel - Part 2 of 2: Applications and DistributionsEvaluare: 2 din 5 stele2/5 (1)
- Lecture Week2 2021 Cobot Basic ConceptsDocument33 paginiLecture Week2 2021 Cobot Basic ConceptsPaulo SantosÎncă nu există evaluări
- Grass Cutting ROBOTDocument8 paginiGrass Cutting ROBOTKrishnaDuttPandeyKdpÎncă nu există evaluări
- Mechanisms and Robotics Lab (ME G-511 P) : BITS PilaniDocument3 paginiMechanisms and Robotics Lab (ME G-511 P) : BITS PilaniVipul AgrawalÎncă nu există evaluări
- ME G511 Lect A August 2018Document47 paginiME G511 Lect A August 2018Vipul Agrawal100% (1)
- Jet Diffuser PDFDocument4 paginiJet Diffuser PDFJf OngÎncă nu există evaluări
- ME G511 Lect B August 2018Document18 paginiME G511 Lect B August 2018Vipul AgrawalÎncă nu există evaluări
- Catalogue GlenDocument23 paginiCatalogue Glenar_kushÎncă nu există evaluări
- Prerana 2017 IDECDocument53 paginiPrerana 2017 IDECabmopalhvacÎncă nu există evaluări
- ExPt 4 Ultra Sonic SensorDocument5 paginiExPt 4 Ultra Sonic SensorVipul AgrawalÎncă nu există evaluări
- Mechanisms and Robotics de Es Zg561: Lecture - 2Document49 paginiMechanisms and Robotics de Es Zg561: Lecture - 2AnkithÎncă nu există evaluări
- ME G511 Lect 4 Anatomy Sept 2018Document44 paginiME G511 Lect 4 Anatomy Sept 2018Vipul AgrawalÎncă nu există evaluări
- ME G511 Lect D August 2018Document20 paginiME G511 Lect D August 2018Vipul AgrawalÎncă nu există evaluări
- Lecture Session 1 1627117300493Document56 paginiLecture Session 1 1627117300493balaji ddbÎncă nu există evaluări
- De Es ZG561 PDFDocument59 paginiDe Es ZG561 PDFamareshhrÎncă nu există evaluări
- ME G511 Lect 22 Static Analysis Nov 2018Document18 paginiME G511 Lect 22 Static Analysis Nov 2018Vipul AgrawalÎncă nu există evaluări
- ME G511 Lect 19 Oct 2018Document44 paginiME G511 Lect 19 Oct 2018Vipul AgrawalÎncă nu există evaluări
- ME G511 Lect 25 Equation of Motion Nov 2018Document23 paginiME G511 Lect 25 Equation of Motion Nov 2018Vipul AgrawalÎncă nu există evaluări
- ME G511 Lect 5 Wrist Sept 2018Document26 paginiME G511 Lect 5 Wrist Sept 2018Vipul AgrawalÎncă nu există evaluări
- In Line Centrifugal Fan IOMDocument31 paginiIn Line Centrifugal Fan IOMMunyaradzi MarizaniÎncă nu există evaluări
- Introduction To Matlab Robotics ToolboxDocument10 paginiIntroduction To Matlab Robotics ToolboxAlbertoAntoniettiÎncă nu există evaluări
- IoT Based Industrial Information GatheringDocument7 paginiIoT Based Industrial Information GatheringEditor IJTSRDÎncă nu există evaluări
- ME G511 Lect 18 Oct 2018Document30 paginiME G511 Lect 18 Oct 2018Vipul Agrawal100% (1)
- Optimization of Machining Time Using Feature Based Process PlanningDocument7 paginiOptimization of Machining Time Using Feature Based Process PlanningSuresh Rajagopal100% (1)
- Lean Manu System - WhyDocument35 paginiLean Manu System - Whypavan hydÎncă nu există evaluări
- ME2401 Mechatronics NotesDocument99 paginiME2401 Mechatronics NotesVijayasuthaJero0% (1)
- Mechatronics Handout BITSDocument3 paginiMechatronics Handout BITSmusarraf172Încă nu există evaluări
- DehumidifierDocument5 paginiDehumidifierbzkizo_sbbÎncă nu există evaluări
- Difference Between HRV/ ERV and HRWDocument13 paginiDifference Between HRV/ ERV and HRWhbardhanÎncă nu există evaluări
- Technical Data SheetDocument6 paginiTechnical Data SheetAamir ShaikhÎncă nu există evaluări
- Application of Quality Function Deployment in Developing An Air-Conditioning UnitDocument7 paginiApplication of Quality Function Deployment in Developing An Air-Conditioning UnitInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Jet Nozzles DUKDocument14 paginiJet Nozzles DUKKerx EndranoÎncă nu există evaluări
- Assignment-02 Report Mechatronics 2016BA30045Document12 paginiAssignment-02 Report Mechatronics 2016BA30045ankit dimri100% (1)
- Chapter 7 A GrooverDocument10 paginiChapter 7 A GrooverSyma ShaheenÎncă nu există evaluări
- AHU ManualDocument41 paginiAHU Manualajayvarma02626100% (1)
- GT5 - GB Technical DataDocument82 paginiGT5 - GB Technical DatadoubleggÎncă nu există evaluări
- Energy SavingDocument4 paginiEnergy SavingMohammad QureshiÎncă nu există evaluări
- LouversDocument22 paginiLouversTareq AbdellatifÎncă nu există evaluări
- MiniPAC Manual REV 4.3 July 25 2012Document78 paginiMiniPAC Manual REV 4.3 July 25 2012zfo302Încă nu există evaluări
- Process Planning, CAPPDocument67 paginiProcess Planning, CAPPNahugirsh ZozÎncă nu există evaluări
- Parabolic Solar CollectorDocument9 paginiParabolic Solar CollectorWise manÎncă nu există evaluări
- Ceiling Diffusers 1Document240 paginiCeiling Diffusers 1Mohammed AlsheekhÎncă nu există evaluări
- SEC Mechatronics Lab Manual R2013 Shan PDFDocument93 paginiSEC Mechatronics Lab Manual R2013 Shan PDFMonish KumarÎncă nu există evaluări
- Introduction To Energy Efficient MotorsDocument5 paginiIntroduction To Energy Efficient MotorsSushank KastureÎncă nu există evaluări
- Satyabhama MechDocument97 paginiSatyabhama MechRahul Kumar KÎncă nu există evaluări
- Flying Robot Seminar ReportDocument28 paginiFlying Robot Seminar ReportMahaManthraÎncă nu există evaluări
- RobotStudio ABB - Product SpecificationDocument40 paginiRobotStudio ABB - Product SpecificationAsier Mitxelena LandaÎncă nu există evaluări
- Assignment 1: Modeling and Simulation of Car Steering SystemsDocument4 paginiAssignment 1: Modeling and Simulation of Car Steering SystemsshyamÎncă nu există evaluări
- Set No. 1Document7 paginiSet No. 1Puru GaurÎncă nu există evaluări
- Manipulator Modeling & Control 1 Content of This Lab: 1.1 Installing and Loading The Lab in QT CreatorDocument11 paginiManipulator Modeling & Control 1 Content of This Lab: 1.1 Installing and Loading The Lab in QT CreatorNicolás FrancinelliÎncă nu există evaluări
- Planar Linkage Synthesis: A modern CAD based approachDe la EverandPlanar Linkage Synthesis: A modern CAD based approachÎncă nu există evaluări
- Practical Field Robotics: A Systems ApproachDe la EverandPractical Field Robotics: A Systems ApproachÎncă nu există evaluări
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxDe la EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxEvaluare: 4 din 5 stele4/5 (2)
- Enforced ButtDocument2 paginiEnforced ButtSwati DhurpateÎncă nu există evaluări
- Attenuation and DispersionDocument92 paginiAttenuation and Dispersionscribd01Încă nu există evaluări
- CTSH - Technical Bulletin 97-1Document4 paginiCTSH - Technical Bulletin 97-1hesigu14Încă nu există evaluări
- CP LAB1 Problem SolvingDocument11 paginiCP LAB1 Problem SolvingFaizanAminÎncă nu există evaluări
- Encyclopedia of Greek and Roman Mythology (Facts On File Library of Religion and Mythology)Document241 paginiEncyclopedia of Greek and Roman Mythology (Facts On File Library of Religion and Mythology)Саша ПаповићÎncă nu există evaluări
- Ellipse orDocument23 paginiEllipse orTEJA SINGHÎncă nu există evaluări
- Final Exam - Basic MathDocument1 paginăFinal Exam - Basic MathSheila Marie AmigoÎncă nu există evaluări
- Maths FTP NeevDocument10 paginiMaths FTP NeevKaran SinghÎncă nu există evaluări
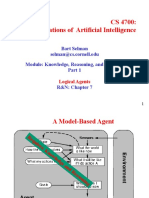
- CS 4700: Foundations of Artificial IntelligenceDocument91 paginiCS 4700: Foundations of Artificial Intelligenceabdolmojeeb nourÎncă nu există evaluări
- Memorandum of in Crafting The School Improvement Plan: Rodelio T. Laxamana Edna M. DabuDocument3 paginiMemorandum of in Crafting The School Improvement Plan: Rodelio T. Laxamana Edna M. DabuMarife MagsinoÎncă nu există evaluări
- Discrete Maths 103 124Document22 paginiDiscrete Maths 103 124Bamdeb DeyÎncă nu există evaluări
- 2 Bit Full AdderDocument21 pagini2 Bit Full AdderSilvestre VásquezÎncă nu există evaluări
- Chem Lab 7sDocument7 paginiChem Lab 7sChantelle LimÎncă nu există evaluări
- Chapter Six: Boundary Tension and Wettability WettabilityDocument24 paginiChapter Six: Boundary Tension and Wettability WettabilityAlimahmood BahraniÎncă nu există evaluări
- Thermal PhysicsDocument42 paginiThermal Physicskrishkhatri1501Încă nu există evaluări
- Limits, Fits and Tolerances: Prof. S. S. PandeDocument31 paginiLimits, Fits and Tolerances: Prof. S. S. PandeM PankajÎncă nu există evaluări
- Torreti - Bachelard e FenomenotecnicaDocument19 paginiTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaÎncă nu există evaluări
- 3.distributed Mutual ExclusionDocument2 pagini3.distributed Mutual ExclusionShashank GosaviÎncă nu există evaluări
- Rudita Cahya Nadila - CH 4Document8 paginiRudita Cahya Nadila - CH 4Giovanni HebertÎncă nu există evaluări
- 10 - 1 Simplifying Rational Expressions Trout 09Document14 pagini10 - 1 Simplifying Rational Expressions Trout 09Vehid KurtićÎncă nu există evaluări
- Solar Radiation Model: L.T. Wong, W.K. ChowDocument34 paginiSolar Radiation Model: L.T. Wong, W.K. ChowSubhash ChandÎncă nu există evaluări
- CAPE Pure Math P1 2008-2020Document117 paginiCAPE Pure Math P1 2008-2020Leah CassieÎncă nu există evaluări
- Cayley Contest: Canadian Mathematics CompetitionDocument6 paginiCayley Contest: Canadian Mathematics CompetitioneilycÎncă nu există evaluări
- Assignment-I - 1st SemDocument2 paginiAssignment-I - 1st SemA1 TRIANGLEÎncă nu există evaluări
- Teaching Scheme For B.Tech "Industrial & Production Engineering"Document61 paginiTeaching Scheme For B.Tech "Industrial & Production Engineering"Sasank SaiÎncă nu există evaluări
- Synthetic Division ReviewDocument3 paginiSynthetic Division ReviewLailah Rose AngkiÎncă nu există evaluări
- Gitam PDFDocument4 paginiGitam PDFSridhar AtlaÎncă nu există evaluări
- 1-Data UnderstandingDocument21 pagini1-Data UnderstandingMahander OadÎncă nu există evaluări
- Inference About One Population Variance: OutlineDocument10 paginiInference About One Population Variance: OutlineChu Thuy DungÎncă nu există evaluări
- MATH 352 Sample Project 1Document10 paginiMATH 352 Sample Project 1Withoon ChinchalongpornÎncă nu există evaluări