S-ar putea să vă placă și
- SEGURAMIENTO Y CONTROL CALIDAD - METAL MECANICA - Rev0Document1 paginăSEGURAMIENTO Y CONTROL CALIDAD - METAL MECANICA - Rev0salvador ayalaÎncă nu există evaluări
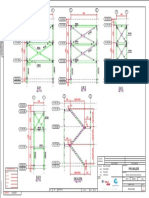
- Eje 1 Eje 2 Eje C: W8X24 WT4X9 W8X24Document1 paginăEje 1 Eje 2 Eje C: W8X24 WT4X9 W8X24salvador ayalaÎncă nu există evaluări
- MT227 Unidad 2b Formas Canónicas - Controlabilidad y Observabilidad 2018-1Document40 paginiMT227 Unidad 2b Formas Canónicas - Controlabilidad y Observabilidad 2018-1salvador ayalaÎncă nu există evaluări
- Cap #03-TRIBOLOGIADocument40 paginiCap #03-TRIBOLOGIAsalvador ayalaÎncă nu există evaluări
- Cap N 01 - Ingenieria MantenimientoDocument19 paginiCap N 01 - Ingenieria Mantenimientosalvador ayalaÎncă nu există evaluări
- Teoría de La Capa Límite PDFDocument9 paginiTeoría de La Capa Límite PDFsalvador ayalaÎncă nu există evaluări
- Osilaciones y OndasDocument80 paginiOsilaciones y Ondashugo alacaÎncă nu există evaluări
- Ataurima M. - Método de Newton Raphson en MATLABDocument6 paginiAtaurima M. - Método de Newton Raphson en MATLABMiguel Ataurima ArellanoÎncă nu există evaluări
- 1 Mat 25Document122 pagini1 Mat 25Armando Espinoza CondoriÎncă nu există evaluări
- ESTADISTICADocument12 paginiESTADISTICAKevin Ramos RivasÎncă nu există evaluări
- Fact OrigamiDocument35 paginiFact OrigamiDrew Woods100% (1)
- Conjuntos NuméricosDocument11 paginiConjuntos NuméricosVanee Rojas TapiaÎncă nu există evaluări
- 02 Eso2Document9 pagini02 Eso2phineasÎncă nu există evaluări
- 1 Libro Guía Matemáticas I - 22Document107 pagini1 Libro Guía Matemáticas I - 22itsicelayaÎncă nu există evaluări
- A) Guía Unam MatematicasDocument56 paginiA) Guía Unam MatematicasGato HowardÎncă nu există evaluări
- EdpDocument120 paginiEdpdoraÎncă nu există evaluări
- Unidades de Matemática 2021Document31 paginiUnidades de Matemática 2021Dennis DavidÎncă nu există evaluări
- Matematica 3Document7 paginiMatematica 3Andres HerreraÎncă nu există evaluări
- Coordenadas BaricéntricasDocument3 paginiCoordenadas BaricéntricasJavier Garcia RajoyÎncă nu există evaluări
- Practica de Vectores 2-311143218437Document10 paginiPractica de Vectores 2-311143218437Piero Noa ChahuayoÎncă nu există evaluări
- Extremal ProblemasDocument5 paginiExtremal ProblemasIsy Omar Florez Yucra100% (1)
- Tarea de MateDocument22 paginiTarea de MateJose Carlos Huaman CasimiroÎncă nu există evaluări
- ECUACIONES CUBICAS Teorema CardanoDocument5 paginiECUACIONES CUBICAS Teorema CardanoWillian Rodriguez ChamacheÎncă nu există evaluări
- Aritmetica Analitica UnadDocument8 paginiAritmetica Analitica UnadDIDIER CAMACHO FLOREZ0% (1)
- Guia de Operatoria Con FraccionesDocument12 paginiGuia de Operatoria Con FraccionesMarjorie Alejandra FloresÎncă nu există evaluări
- Programa Analítico Cál Aplic 2022 EcoDocument5 paginiPrograma Analítico Cál Aplic 2022 EcoAriana AltÎncă nu există evaluări
- Gradiente de Una FuncionDocument16 paginiGradiente de Una FuncionANDY GONZALO CHOTA GRANDEZÎncă nu există evaluări
- Aritmética ElementalDocument2 paginiAritmética ElementalIsc RocadyÎncă nu există evaluări
- Portafolio CurriculoDocument20 paginiPortafolio CurriculoDiego Armando Díaz AlvaradoÎncă nu există evaluări
- Julio 2020 SolucionesDocument6 paginiJulio 2020 SolucionesAitana De Benito RodasÎncă nu există evaluări
- Tercera Semana Matematicas 6° MarzoDocument6 paginiTercera Semana Matematicas 6° MarzoJessica Dayanny Castro SalazarÎncă nu există evaluări
- Ejercicios 9.10 Taylor PDFDocument2 paginiEjercicios 9.10 Taylor PDFManuel Estuardo MoralesÎncă nu există evaluări
- Serie 4Document20 paginiSerie 4Yair Omar Ruiz LuisÎncă nu există evaluări
- Matemática Básica Tarea 2Document13 paginiMatemática Básica Tarea 2yajaira santanaÎncă nu există evaluări
- SA01. - Practica de Vectores (2021-I)Document8 paginiSA01. - Practica de Vectores (2021-I)Jinmy AngelÎncă nu există evaluări
- Tabla de IntegralesDocument5 paginiTabla de Integralesjosefer100% (16)