S-ar putea să vă placă și
- Monografia de Cálculos de Elementos de Máquina IDocument21 paginiMonografia de Cálculos de Elementos de Máquina IDiego AlonsoÎncă nu există evaluări
- IMPEDANCIASDocument27 paginiIMPEDANCIASbahena aguilar marthaÎncă nu există evaluări
- Principios de ElectrónicaDocument35 paginiPrincipios de ElectrónicajhonÎncă nu există evaluări
- Equipo 4 Sistemas de VisionDocument36 paginiEquipo 4 Sistemas de VisionJuanÎncă nu există evaluări
- Impresión y Ploteo - Layouts - Model Space - ViewportsDocument12 paginiImpresión y Ploteo - Layouts - Model Space - ViewportsJuan Carlos AlvaradoÎncă nu există evaluări
- Laboratorio 2 RoboticaDocument6 paginiLaboratorio 2 RoboticaFrankoÎncă nu există evaluări
- Practica #6Document26 paginiPractica #6Efren Aguiñaga RayasÎncă nu există evaluări
- Informe2 IIIPDocument28 paginiInforme2 IIIPAna LucyÎncă nu există evaluări
- EMCO WinNC For Sinumerik Operate Turn SP 1849 B EspañolDocument600 paginiEMCO WinNC For Sinumerik Operate Turn SP 1849 B EspañolWillian Leiva HuarcayaÎncă nu există evaluări
- Máquina CNCDocument7 paginiMáquina CNCFernando Javier FrancoÎncă nu există evaluări
- Herramientas de Corte CNCDocument12 paginiHerramientas de Corte CNCStratowarionÎncă nu există evaluări
- Primer Informe PDFDocument20 paginiPrimer Informe PDFkarenÎncă nu există evaluări
- Actuadores Electricos, Neumaticos y HidraulicosDocument48 paginiActuadores Electricos, Neumaticos y HidraulicosCristianQuispeVenturaÎncă nu există evaluări
- Manual para Ser Profesional Técnico en Mecànica de Producción (2) - 1Document46 paginiManual para Ser Profesional Técnico en Mecànica de Producción (2) - 1Liam JJÎncă nu există evaluări
- Impresion en AutocadDocument18 paginiImpresion en AutocadHenry Leon SuarezÎncă nu există evaluări
- Microsoft PowerPoint - Corte Por Laser.Document40 paginiMicrosoft PowerPoint - Corte Por Laser.claudioorozco100% (1)
- Guía COSIMIRDocument11 paginiGuía COSIMIRAndres CarrilloÎncă nu există evaluări
- Programas Cad Mas ActualesDocument6 paginiProgramas Cad Mas ActualesLeydi Beatris SanchezÎncă nu există evaluări
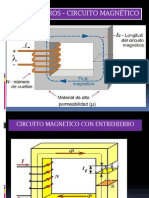
- Clase Nº2 Parametros - Circuito MagnéticoDocument30 paginiClase Nº2 Parametros - Circuito MagnéticoKodesh Sairitupac PillacaÎncă nu există evaluări
- Prototipo de Control Numerico: IntroducciónDocument32 paginiPrototipo de Control Numerico: IntroducciónManuel Villena AlvarezÎncă nu există evaluări
- Practicas Logix Pro rs500 120320185933 Phpapp02 PDFDocument31 paginiPracticas Logix Pro rs500 120320185933 Phpapp02 PDFAnonymous VwIFT17pÎncă nu există evaluări
- 02 Dibujo ParametricoDocument30 pagini02 Dibujo ParametricoEnrique Villegas MedinaÎncă nu există evaluări
- Rama EstudiantilDocument5 paginiRama Estudiantilnelson castro paccaraÎncă nu există evaluări
- Lab Nº1 - Morfología Del Robot - 2013-IDocument11 paginiLab Nº1 - Morfología Del Robot - 2013-IMauricio LewisÎncă nu există evaluări
- Cinematica Del Robot Laboratorio 2Document4 paginiCinematica Del Robot Laboratorio 2Walter CastellanosÎncă nu există evaluări
- Capacitancia y Condensadores IIDocument18 paginiCapacitancia y Condensadores IIAlejandro LaraÎncă nu există evaluări
- Diagrama de Bloques de Proceso de Corte Por PlasmaDocument14 paginiDiagrama de Bloques de Proceso de Corte Por PlasmaLuis Alberto Perez GarciaÎncă nu există evaluări
- Guia #2 Laboratorio Redes Neuronales y Logica DifusaDocument6 paginiGuia #2 Laboratorio Redes Neuronales y Logica DifusaEduardo Cesar Chumpitaz FariasÎncă nu există evaluări
- Comportamiento Del Motor Asíncrono Bajo Carga y Determinación de La EficienciaDocument7 paginiComportamiento Del Motor Asíncrono Bajo Carga y Determinación de La EficienciaJ.A. Calvillo0% (1)
- Informe CNCDocument8 paginiInforme CNCMixio Olivares MuñozÎncă nu există evaluări
- Partes de La FresadoraDocument7 paginiPartes de La FresadoraRonnie LoboÎncă nu există evaluări
- FresadoDocument8 paginiFresadoYoser Rios RoldanÎncă nu există evaluări
- 5 Semana 15Document47 pagini5 Semana 15Jarot HackingÎncă nu există evaluări
- Torneado ParaleloDocument19 paginiTorneado ParaleloMabel MonteroÎncă nu există evaluări
- Inf2 Rob2Document13 paginiInf2 Rob2Marco Moya MontesÎncă nu există evaluări
- Informe Robot Scara Cinemática Directa-InversaDocument7 paginiInforme Robot Scara Cinemática Directa-InversaLeonardo SuarezÎncă nu există evaluări
- Tabla Comparativa InstrumentacionDocument3 paginiTabla Comparativa InstrumentacionCarlos Acosta Jaramillo100% (1)
- Conversion Estrella A TrianguloDocument5 paginiConversion Estrella A TrianguloandrewslimavÎncă nu există evaluări
- Preguntas Guia de RoboticaDocument5 paginiPreguntas Guia de RoboticaDaniel Osis0% (1)
- Guía de Operación y Programación Torno CNCDocument12 paginiGuía de Operación y Programación Torno CNCProfeAlexisÎncă nu există evaluări
- Lab. 05 - Mandos Secuenciales PDFDocument13 paginiLab. 05 - Mandos Secuenciales PDFIsrael Castillo OlayaÎncă nu există evaluări
- Etapas Del Diseno I ManufacturaDocument16 paginiEtapas Del Diseno I ManufacturaJose Luis Chavez VillaÎncă nu există evaluări
- p4 Curva Caracteristica de Los TransistoresDocument11 paginip4 Curva Caracteristica de Los Transistorescolapse teiwinÎncă nu există evaluări
- 9.-Guía de Lab. #9 Banco de Ensayo de SensoresDocument8 pagini9.-Guía de Lab. #9 Banco de Ensayo de SensoresPINEDA CASTAÑEDA VANESSA DEL CARMENÎncă nu există evaluări
- DISEnOMECaNICOFABRICACIN PDFDocument13 paginiDISEnOMECaNICOFABRICACIN PDFadrianÎncă nu există evaluări
- Matrices de CorteDocument5 paginiMatrices de CorteEdison Enrique Hidalgo SilvaÎncă nu există evaluări
- Vúmetro de 8 LEDs Con LM324Document2 paginiVúmetro de 8 LEDs Con LM324fchavestaÎncă nu există evaluări
- 3 Bloques y AtributosDocument22 pagini3 Bloques y AtributosDorita AcÎncă nu există evaluări
- Robótica - 4-Sistemas de Coordenadas PDFDocument16 paginiRobótica - 4-Sistemas de Coordenadas PDFAlejandro CordobaÎncă nu există evaluări
- Manual Teorico-Práctico ACISACDocument131 paginiManual Teorico-Práctico ACISACAcisac AutocontrolÎncă nu există evaluări
- 100000I23N CursoIntegradorI DisenoElectronicoDocument4 pagini100000I23N CursoIntegradorI DisenoElectronicoJuan Carlos LudwigÎncă nu există evaluări
- Elementos Unidimensionales 1Document47 paginiElementos Unidimensionales 1Andrés Edisson ÁguilaÎncă nu există evaluări
- Introduccion A Los ServomotoresDocument14 paginiIntroduccion A Los ServomotoresL30N1Încă nu există evaluări
- Ajuste - La Limadora 11Document51 paginiAjuste - La Limadora 11DarlingAlvaradoÎncă nu există evaluări
- Micro Tuto Fusion 360-Parte 1Document32 paginiMicro Tuto Fusion 360-Parte 1Gonzalo Salfate MaldonadoÎncă nu există evaluări
- Corte Por HiloDocument6 paginiCorte Por HiloMaferBeristainÎncă nu există evaluări
- Evaluacion Torno 2Document4 paginiEvaluacion Torno 2Thomas FieldsÎncă nu există evaluări
- TornoDocument38 paginiTornoEmmanuel LaraÎncă nu există evaluări
- 3 Control y Programacion de RobotsDocument13 pagini3 Control y Programacion de RobotsjesusÎncă nu există evaluări
- Robotica IndustrialDocument8 paginiRobotica IndustrialholamecoÎncă nu există evaluări
- Tema 3 - WordDocument3 paginiTema 3 - WordJosé Carlos Guerrero ChávezÎncă nu există evaluări
- Solucionario Pre San Marcos 2010-II Semana 14Document107 paginiSolucionario Pre San Marcos 2010-II Semana 141MONOGRAFIASÎncă nu există evaluări
- El Precio Del LlamadoDocument3 paginiEl Precio Del Llamadodario benitesÎncă nu există evaluări
- Manejo de Convulsiones Pediatricas en UrgenciasDocument5 paginiManejo de Convulsiones Pediatricas en Urgenciasbonboncita24Încă nu există evaluări
- Planilla de Citas: Ortega Bacca Zuleyma Yurema 10/may./2021, LunesDocument2 paginiPlanilla de Citas: Ortega Bacca Zuleyma Yurema 10/may./2021, Luneserika lesmesÎncă nu există evaluări
- Epu - Documento Base - Semana 7Document20 paginiEpu - Documento Base - Semana 7Camila GuamánÎncă nu există evaluări
- Diagrama BimanualDocument2 paginiDiagrama BimanualWaldo Colón BejaránÎncă nu există evaluări
- HIDROGENODocument24 paginiHIDROGENOtonyÎncă nu există evaluări
- Inventos Colombianos-Ingeneria MecatronicaDocument1 paginăInventos Colombianos-Ingeneria MecatronicaJaiderk David Corredor MateusÎncă nu există evaluări
- Cinemática Vectorial (II)Document2 paginiCinemática Vectorial (II)Carmen Ruiz DuránÎncă nu există evaluări
- Recursos de Una EmpresaDocument7 paginiRecursos de Una EmpresaDANIELÎncă nu există evaluări
- Pequenosheroes Joseymaria Copyright v52017Document11 paginiPequenosheroes Joseymaria Copyright v52017Grecia Jeronimo100% (2)
- Diapositiva 06Document18 paginiDiapositiva 06jojosave22Încă nu există evaluări
- Marco Teórico AltimetricoDocument2 paginiMarco Teórico AltimetricoXiomaraÎncă nu există evaluări
- Tomo I Defensa IntegralDocument86 paginiTomo I Defensa IntegralEdmundo Cortez100% (5)
- Modulo de Actividades 2024 2°añoDocument65 paginiModulo de Actividades 2024 2°añoRomina GamarraÎncă nu există evaluări
- Breve Historia de WindowsDocument7 paginiBreve Historia de WindowsMiguelCamachoT-TypeÎncă nu există evaluări
- Formato Del EnsayoDocument3 paginiFormato Del EnsayoISABELLA ISAZA RAMIREZÎncă nu există evaluări
- Chilam Balam: El Libro Sagrado MayaDocument33 paginiChilam Balam: El Libro Sagrado MayaJosé CipactliÎncă nu există evaluări
- Evaluación Tercer Periodo6 BiologiaDocument3 paginiEvaluación Tercer Periodo6 BiologiaJhon LopezÎncă nu există evaluări
- Aneurisma CerebralDocument10 paginiAneurisma CerebralGary ReaÎncă nu există evaluări
- Complicaciones Fracturas SupracondileasDocument22 paginiComplicaciones Fracturas SupracondileasDavid CamposÎncă nu există evaluări
- PUTUMAYO ENSAYO FNDocument4 paginiPUTUMAYO ENSAYO FNAlfonsina Quiroga VargasÎncă nu există evaluări
- Tarea 3.2. Paronimos - Graduandos-1Document2 paginiTarea 3.2. Paronimos - Graduandos-1José Fernando Camey GuicoyÎncă nu există evaluări
- Derecho Administrativo SancionadorDocument15 paginiDerecho Administrativo SancionadorJOSE MIGUEL MORENO PRIETOÎncă nu există evaluări
- Ondas en Un HiloDocument20 paginiOndas en Un Hiloalex66xÎncă nu există evaluări
- NUTRICION-piel DIapositivasDocument48 paginiNUTRICION-piel DIapositivasErickson Rafael Condor Ames100% (1)
- VP-030-00 Protocolo Validación Guias VascularesDocument21 paginiVP-030-00 Protocolo Validación Guias VascularesedurdoÎncă nu există evaluări
- Intervencion Socioeducativa en Las EmpresasDocument11 paginiIntervencion Socioeducativa en Las EmpresasAna ZafraÎncă nu există evaluări
- Ejercicios Circuitos RCDocument7 paginiEjercicios Circuitos RCElizabeth CastellanosÎncă nu există evaluări