S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- f6ea499c37d63b3801dee6dd82a4aaf2_320a9a62d020a9964c64b2c44de68cf1Document2 paginif6ea499c37d63b3801dee6dd82a4aaf2_320a9a62d020a9964c64b2c44de68cf1Hardik Gupta0% (1)
- mt-700 User ManualDocument8 paginimt-700 User ManualJorge TavaresÎncă nu există evaluări
- Irregular Past Tense ThirdDocument1 paginăIrregular Past Tense ThirdJorge Tavares0% (1)
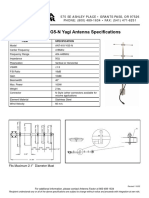
- ANT-418-YG5-N Yagi Antenna SpecificationsDocument1 paginăANT-418-YG5-N Yagi Antenna SpecificationsJorge TavaresÎncă nu există evaluări
- 433MHz Strength MeterDocument6 pagini433MHz Strength MeterJorge TavaresÎncă nu există evaluări
- DSO Quad V2.7 SchematicDocument1 paginăDSO Quad V2.7 SchematicJorge TavaresÎncă nu există evaluări
- Cot Angel Eng 3Document3 paginiCot Angel Eng 3Arjay GarboÎncă nu există evaluări
- Analysis of The Trollaukin Bind.Document6 paginiAnalysis of The Trollaukin Bind.EdwardÎncă nu există evaluări
- AbsenteeismsmawfinalDocument13 paginiAbsenteeismsmawfinalJohn Ray VelascoÎncă nu există evaluări
- MLA Short GuideDocument2 paginiMLA Short GuidekennethreedsÎncă nu există evaluări
- Theories in NursingDocument22 paginiTheories in NursingChrisgr8Încă nu există evaluări
- I2E ReportDocument15 paginiI2E Reportrag2604756437Încă nu există evaluări
- 8 4 Function NotationDocument16 pagini8 4 Function Notationapi-233527181Încă nu există evaluări
- Correlation & RegressionDocument26 paginiCorrelation & Regressionabhilashaupadhyaya100% (1)
- V10 - Key (Checked & Apd by Graham)Document4 paginiV10 - Key (Checked & Apd by Graham)HưởngÎncă nu există evaluări
- Aiyaz Sayed Khaiyum ThesisDocument5 paginiAiyaz Sayed Khaiyum Thesisafbtbakvk100% (2)
- QTDM Unit-2 Correlation & Regression AnalysisDocument12 paginiQTDM Unit-2 Correlation & Regression AnalysisAishwarya ManishÎncă nu există evaluări
- Advanced Quality ControlDocument38 paginiAdvanced Quality ControlSantosh VemulaÎncă nu există evaluări
- Constructivist Approach To Teaching and LearningDocument2 paginiConstructivist Approach To Teaching and LearningLen-Len CobsilenÎncă nu există evaluări
- GradDocument74 paginiGradMoHamedÎncă nu există evaluări
- Exercise-6 1 1 2-6 1 1 5Document7 paginiExercise-6 1 1 2-6 1 1 5Ramgie Danielle NamolÎncă nu există evaluări
- Simplified Remote Restart White PaperDocument33 paginiSimplified Remote Restart White Paperch herlinÎncă nu există evaluări
- PFI ES-27-1994 - Visual Examination - The Purpose, Meaning and Limitation of The TermDocument4 paginiPFI ES-27-1994 - Visual Examination - The Purpose, Meaning and Limitation of The TermThao NguyenÎncă nu există evaluări
- Valve Stem SealsDocument2 paginiValve Stem SealsBinny Samuel Christy100% (1)
- Chapter 1 Summary NormalizationDocument20 paginiChapter 1 Summary NormalizationblackprÎncă nu există evaluări
- Sediment Transport Flo2DDocument22 paginiSediment Transport Flo2DJoshua Xilo MoronÎncă nu există evaluări
- Capgemini 2017 Informe AnualDocument360 paginiCapgemini 2017 Informe Anualjoseosteopatia3693Încă nu există evaluări
- Microsoft Power Point 2007-IntroductionDocument27 paginiMicrosoft Power Point 2007-IntroductionizahusniÎncă nu există evaluări
- PreDefined VB - Net FunctionsDocument10 paginiPreDefined VB - Net FunctionsMohd NafishÎncă nu există evaluări
- Needs Analysis Planning A Syllabus For A PDFDocument17 paginiNeeds Analysis Planning A Syllabus For A PDFEliana SotoÎncă nu există evaluări
- CD Ch08 VariableHeatCapacitiesDocument9 paginiCD Ch08 VariableHeatCapacitiesEric BowlsÎncă nu există evaluări
- Agar Cube LabDocument2 paginiAgar Cube LabairulyantiÎncă nu există evaluări
- Leadership in The Construction Industry 2008Document24 paginiLeadership in The Construction Industry 2008Gishan SanjeewaÎncă nu există evaluări