S-ar putea să vă placă și
- 05.3-Interruptores Automáticos PDFDocument77 pagini05.3-Interruptores Automáticos PDFMarcox AntonioÎncă nu există evaluări
- Pruebas Eléctricas A Motores PDFDocument5 paginiPruebas Eléctricas A Motores PDFEsteban Hernadez100% (1)
- 05 - Electricidad IndustrialDocument82 pagini05 - Electricidad IndustrialMASSIELL DALISSAÎncă nu există evaluări
- s03 Arranque Motores TrifásicosDocument38 paginis03 Arranque Motores TrifásicosRely Davilmar Limascca Garcia100% (1)
- Mantenimiento de Motores EléctricosDocument35 paginiMantenimiento de Motores EléctricosMauro LombardoÎncă nu există evaluări
- Ejemplo de Una Subestacion ElectricaDocument114 paginiEjemplo de Una Subestacion ElectricaScada UcvÎncă nu există evaluări
- Instructivo - Mantenimiento de Motores ElectricosDocument4 paginiInstructivo - Mantenimiento de Motores ElectricosJacques Lopez OrtegaÎncă nu există evaluări
- GuIa Mantenimiento ElectricoDocument55 paginiGuIa Mantenimiento ElectricoSebastian Carvajal100% (3)
- Conexión de Motores ElectricosDocument4 paginiConexión de Motores ElectricosLuis Eduardo Mercado100% (2)
- Circuitos Neumaticos Secuenciales CompuestosDocument19 paginiCircuitos Neumaticos Secuenciales CompuestosAlex Valladares Ordinola100% (1)
- Contactores y Dispositivos de MandoDocument65 paginiContactores y Dispositivos de MandoAndres SebastianÎncă nu există evaluări
- Guía - 3. Motores Trifa Pao PDFDocument7 paginiGuía - 3. Motores Trifa Pao PDFPaola AvilaÎncă nu există evaluări
- Diagramas ElectricosDocument26 paginiDiagramas ElectricosPilar Love100% (1)
- Plan de Mantenimiento TornoDocument10 paginiPlan de Mantenimiento TornoRomero OliÎncă nu există evaluări
- Curso de Mecánica IndustrialDocument1 paginăCurso de Mecánica IndustrialQarrizalw's xd100% (1)
- Mantenimiento IndustrialDocument16 paginiMantenimiento IndustrialCristian Zavaleta100% (1)
- Supresores de Picos y Transientes de VoltajeDocument18 paginiSupresores de Picos y Transientes de VoltajedulcesinestesiaÎncă nu există evaluări
- Practica No. 2 Uso de Equipo Lab-Volt y MultimetroDocument8 paginiPractica No. 2 Uso de Equipo Lab-Volt y MultimetroMalena RodriguezÎncă nu există evaluări
- Power Point Variadores de VelocidadDocument0 paginiPower Point Variadores de VelocidadjosegermanalvarezÎncă nu există evaluări
- Mantenimiento ElectromecanicoDocument146 paginiMantenimiento Electromecanicoironserg95% (20)
- 1 Tipos de MantenimientoDocument51 pagini1 Tipos de MantenimientoAndres Florez DuarteÎncă nu există evaluări
- Arrancadores Suaves PDFDocument1 paginăArrancadores Suaves PDFJOSE MIGUEL PINTOÎncă nu există evaluări
- Motores Eléctricos Guia 6 - PruebasDocument10 paginiMotores Eléctricos Guia 6 - PruebasJosé Luis Vásquez SilvaÎncă nu există evaluări
- Mantenimiento PreventivoDocument26 paginiMantenimiento PreventivoVictoria Gutierrez86% (7)
- Mantenimiento A Motores ElectricosDocument41 paginiMantenimiento A Motores ElectricosIvan Jacob80% (5)
- Mantenimiento de Motores EléctricosDocument31 paginiMantenimiento de Motores EléctricosSergio Terceros Santa Cruz100% (3)
- Manual de Practicas de Control de MotoresDocument20 paginiManual de Practicas de Control de MotoresTorres Pineda Osvaldo100% (1)
- Mantenimiento de Un Motor-ElectricoDocument19 paginiMantenimiento de Un Motor-ElectricoJHIMI ZEÑA INOÑAN100% (1)
- Control y Protección de Motores Eléctricos-4Document44 paginiControl y Protección de Motores Eléctricos-4Alonso Monja EspinozaÎncă nu există evaluări
- 1 Mmp. Silabo - Mantenimiento Preventivo FlavisurDocument6 pagini1 Mmp. Silabo - Mantenimiento Preventivo FlavisurCristiam QuispeÎncă nu există evaluări
- Caracteristicas y Aplicaciones de Los Motores EléctricosDocument5 paginiCaracteristicas y Aplicaciones de Los Motores EléctricosrafaelÎncă nu există evaluări
- A4 - Guia de Electricida IndustrialDocument17 paginiA4 - Guia de Electricida IndustrialCristian Stiven Amado RuizÎncă nu există evaluări
- Mantenimiento Eléctrico de TransformadoresDocument50 paginiMantenimiento Eléctrico de TransformadoresjuanangelmallorquinÎncă nu există evaluări
- Tableros ElectricosDocument55 paginiTableros ElectricosMauricio HenaoÎncă nu există evaluări
- Mtto LeroyDocument28 paginiMtto Leroyدياز غييرمو100% (1)
- Curso de Control de Motores ElectricosDocument177 paginiCurso de Control de Motores ElectricosErick Morales UrbinaÎncă nu există evaluări
- Pruebas Mantenimiento Motores EléctricosDocument21 paginiPruebas Mantenimiento Motores Eléctricosjm67% (3)
- ElectroneumáticaDocument4 paginiElectroneumáticaalanÎncă nu există evaluări
- Documentacion de Mantenimiento PDFDocument24 paginiDocumentacion de Mantenimiento PDFFabian Gustavo TostÎncă nu există evaluări
- Plan de MantenimientoDocument11 paginiPlan de MantenimientoBastian Venegas PerezÎncă nu există evaluări
- Pruebas A Plantas de EmergenciaDocument13 paginiPruebas A Plantas de EmergenciaMiguel Perez Flores0% (1)
- Mantenimiento Preventivo Motores EléctricosDocument4 paginiMantenimiento Preventivo Motores EléctricosLuis Carballo RojasÎncă nu există evaluări
- Informe N Mantenimiento Electromecanico.Document28 paginiInforme N Mantenimiento Electromecanico.Fransherling Castillo Cabrera100% (2)
- Planificación - Rebobinado MonofásicoDocument11 paginiPlanificación - Rebobinado Monofásicoomar100% (1)
- Normas en Conexion Estrella TrianguloDocument20 paginiNormas en Conexion Estrella TrianguloluisÎncă nu există evaluări
- Funcionamientos Maquinas EléctricasDocument27 paginiFuncionamientos Maquinas Eléctricascesar villamizarÎncă nu există evaluări
- 9 Tipos de MantenimientoDocument9 pagini9 Tipos de MantenimientojogremaurÎncă nu există evaluări
- Diapositiva Motor TrifásicoDocument36 paginiDiapositiva Motor TrifásicoJohn Jairo Castro100% (1)
- Registro de Inspección - Tableros Electricos 220-440 V - Estabilizador 220VDocument2 paginiRegistro de Inspección - Tableros Electricos 220-440 V - Estabilizador 220VMarco ANTONIO Salinas LopezÎncă nu există evaluări
- Arranque Estrella-Triangulo PaeaDocument8 paginiArranque Estrella-Triangulo PaeaSergio Mora ChoqqueÎncă nu există evaluări
- Introduccion Al AutomatismoDocument11 paginiIntroduccion Al AutomatismoPablo Ezequiel CarrizoÎncă nu există evaluări
- Motores de Corriente ContinuaDocument5 paginiMotores de Corriente ContinuaAurycell RodriguezÎncă nu există evaluări
- Informacion Sobre CircuitosDocument31 paginiInformacion Sobre CircuitosDavidVzÎncă nu există evaluări
- C2-Tercer Informe-Antonio Guerrero DorantesDocument10 paginiC2-Tercer Informe-Antonio Guerrero DorantesAntonio Guerrero DorantesÎncă nu există evaluări
- Motores y Su Arranque, Normas DinDocument21 paginiMotores y Su Arranque, Normas DinO-Omar RamirezÎncă nu există evaluări
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De la EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Încă nu există evaluări
- Informe 06Document16 paginiInforme 06bassÎncă nu există evaluări
- Presentacion Mecatronica UP 1Document12 paginiPresentacion Mecatronica UP 1Marco Antonio AguilarÎncă nu există evaluări
- Impulsión Eléctrica ExpoDocument30 paginiImpulsión Eléctrica ExpoDiana S. TovarÎncă nu există evaluări
- Actividad 1Document13 paginiActividad 1Damaris Rios RodriguezÎncă nu există evaluări
- GuajiraDocument7 paginiGuajiraEsteban Mercado PachecoÎncă nu există evaluări
- 2zjby1k PDFDocument3 pagini2zjby1k PDFEsteban Mercado PachecoÎncă nu există evaluări
- Impacto Del Modelo Pedagógico, Estructura Pedagógica yDocument8 paginiImpacto Del Modelo Pedagógico, Estructura Pedagógica yEsteban Mercado PachecoÎncă nu există evaluări
- Guia de Aprendizaje. Puesta A TierraDocument3 paginiGuia de Aprendizaje. Puesta A TierraEsteban Mercado PachecoÎncă nu există evaluări
- Actividad 3Document7 paginiActividad 3Esteban Mercado PachecoÎncă nu există evaluări
- Región Insular de ColombiaDocument6 paginiRegión Insular de ColombiaEsteban Mercado PachecoÎncă nu există evaluări
- Plan de Clases JulyDocument5 paginiPlan de Clases JulyEsteban Mercado PachecoÎncă nu există evaluări
- Arranque Estrella TrianguloDocument2 paginiArranque Estrella TrianguloEsteban Mercado PachecoÎncă nu există evaluări
- Certificado ResidencialDocument1 paginăCertificado ResidencialEsteban Mercado PachecoÎncă nu există evaluări
- Modificaciones RETIEDocument68 paginiModificaciones RETIEwintermacÎncă nu există evaluări
- Plan de ClasesDocument5 paginiPlan de ClasesEsteban Mercado PachecoÎncă nu există evaluări
- Cta de Cobro Docentes 2018Document29 paginiCta de Cobro Docentes 2018Esteban Mercado PachecoÎncă nu există evaluări
- Certificado ResidencialDocument1 paginăCertificado ResidencialEsteban Mercado PachecoÎncă nu există evaluări
- Lugares RetieDocument1 paginăLugares RetieEsteban Mercado PachecoÎncă nu există evaluări
- Errores en PantallaDocument1 paginăErrores en PantallaEsteban Mercado PachecoÎncă nu există evaluări
- Lugares RetieDocument1 paginăLugares RetieEsteban Mercado PachecoÎncă nu există evaluări
- Como Preparar AguaDocument1 paginăComo Preparar AguaEsteban Mercado PachecoÎncă nu există evaluări
- Aire AcondicionadoDocument174 paginiAire AcondicionadoDerechos Humanos ConsultoresÎncă nu există evaluări
- Seminario Factores de Riego Eléctrico en La IndustriaDocument44 paginiSeminario Factores de Riego Eléctrico en La IndustriaEsteban Mercado PachecoÎncă nu există evaluări
- Como Preparar AguaDocument1 paginăComo Preparar AguaEsteban Mercado PachecoÎncă nu există evaluări
- U1-Conceptos GeneralesDocument8 paginiU1-Conceptos GeneralesIves RodríguezÎncă nu există evaluări
- Señales Auditivas Del BIOSDocument5 paginiSeñales Auditivas Del BIOSEsteban Mercado PachecoÎncă nu există evaluări
- Metodo de Instalacion PRO ATC Con AvionesDocument1 paginăMetodo de Instalacion PRO ATC Con AvionesEsteban Mercado PachecoÎncă nu există evaluări
- Herramientas de Diseño AutocadDocument1 paginăHerramientas de Diseño AutocadEsteban Mercado PachecoÎncă nu există evaluări
- 03 - GPRSDocument19 pagini03 - GPRSjulivilelaÎncă nu există evaluări
- Solicitud Indemnizacion DesempleoDocument1 paginăSolicitud Indemnizacion DesempleoEsteban Mercado PachecoÎncă nu există evaluări
- Manual de Gasfiteria BasicaDocument15 paginiManual de Gasfiteria BasicaHector Lujan100% (1)
- Instalacion de Tableros de DistribucionDocument43 paginiInstalacion de Tableros de Distribuciongaastudillom100% (1)
- Solicitud Indemnizacion DesempleoDocument3 paginiSolicitud Indemnizacion DesempleoAnonymous maCKPP66FIÎncă nu există evaluări
- Administracion de Asilos MarthitaDocument7 paginiAdministracion de Asilos MarthitatequileroÎncă nu există evaluări
- 07 POEs - DISPENSACIÓN DermamedDocument12 pagini07 POEs - DISPENSACIÓN DermamedMndz RdÎncă nu există evaluări
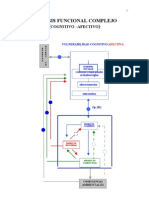
- Walter Riso - Análisis Funcional ComplejoDocument8 paginiWalter Riso - Análisis Funcional ComplejoSamantha Rojas GuzmanÎncă nu există evaluări
- Afil 04Document1 paginăAfil 04Antonia FuentesÎncă nu există evaluări
- Valoracion Muscular y GoniometricaDocument3 paginiValoracion Muscular y GoniometricaGaby Alex67% (6)
- BOTANICADocument8 paginiBOTANICANaydelin TorresÎncă nu există evaluări
- 1 TesisDocument126 pagini1 TesisAlgenis BriceñoÎncă nu există evaluări
- Reproducción de MMS y MMLDocument3 paginiReproducción de MMS y MMLEnrique Llano BernalÎncă nu există evaluări
- Libro Secreto de Juan-Cristo-1 PDFDocument24 paginiLibro Secreto de Juan-Cristo-1 PDFpurrus100% (1)
- Seguridad e Higiene Laboral en La Republica de PanamáDocument19 paginiSeguridad e Higiene Laboral en La Republica de Panamámoises mejiaÎncă nu există evaluări
- Diseño y DiagnosticoDocument28 paginiDiseño y DiagnosticoLara KimÎncă nu există evaluări
- Un Poema Cristiano - Francisco GaramonaDocument3 paginiUn Poema Cristiano - Francisco GaramonamartinlegonÎncă nu există evaluări
- INTERVENCIÓN Y PSICOTERAPIA EN CRISIS - Claudio Martínez - Abrio2020Document18 paginiINTERVENCIÓN Y PSICOTERAPIA EN CRISIS - Claudio Martínez - Abrio2020maria emaÎncă nu există evaluări
- Profilaxis de La VozDocument5 paginiProfilaxis de La VozSammy TumbacoÎncă nu există evaluări
- Generación de Der. Humanos Las Diapos de ExamenDocument6 paginiGeneración de Der. Humanos Las Diapos de Examenjennifer cassandra garciaÎncă nu există evaluări
- Lesiones MeniscalesDocument10 paginiLesiones MeniscalesvilliadrianÎncă nu există evaluări
- Seccion 9 AashtoDocument10 paginiSeccion 9 Aashtoleonel cañari gonzalesÎncă nu există evaluări
- Panel Caving y Sus VariacionesDocument1 paginăPanel Caving y Sus VariacionesKevin QuirozÎncă nu există evaluări
- JustificacionDocument2 paginiJustificacionLeonardo0% (1)
- Proyectos de Reciclaje o Reutilización Más NovedososDocument15 paginiProyectos de Reciclaje o Reutilización Más NovedososMishelle RosarioÎncă nu există evaluări
- PRACTICA 01 Densidades PesoDocument12 paginiPRACTICA 01 Densidades PesoernestoÎncă nu există evaluări
- Lecturas para Bachillerato Con Preguntas Con SolucionesDocument17 paginiLecturas para Bachillerato Con Preguntas Con SolucionesMariana LopezÎncă nu există evaluări
- Pat. Kinderman 2010Document229 paginiPat. Kinderman 2010Joel Palomares100% (2)
- Informe 01Document9 paginiInforme 01africaÎncă nu există evaluări
- Guia Practica Pastos CultivadosDocument20 paginiGuia Practica Pastos CultivadoslcoaguilapÎncă nu există evaluări
- Programa Resp Civil Ii - Practica Iii.Document2 paginiPrograma Resp Civil Ii - Practica Iii.rosalia rojasÎncă nu există evaluări
- Bioética VIH-SIDADocument13 paginiBioética VIH-SIDAlingushilloÎncă nu există evaluări
- CATALOGO HIDROMAC 1 de 2Document408 paginiCATALOGO HIDROMAC 1 de 2Marco Garcia M100% (6)
- Aceites Sagrados EgipciosDocument20 paginiAceites Sagrados EgipciosJuana Maria Medina MoyaÎncă nu există evaluări
- Nervio TrigeminoDocument10 paginiNervio TrigeminoMariana Desiree HinojozaÎncă nu există evaluări