S-ar putea să vă placă și
- Airbus A320/A321 Ground Operations ManualDocument24 paginiAirbus A320/A321 Ground Operations ManualJorge Bello100% (4)
- Vibration Analysis of The ANSPS-67 (V) 3 Surface Search Radar PDFDocument141 paginiVibration Analysis of The ANSPS-67 (V) 3 Surface Search Radar PDFFernando Raúl LADINOÎncă nu există evaluări
- Interview For AirlineDocument42 paginiInterview For Airlinekerem96% (27)
- Basic Aviation Risk StandardDocument63 paginiBasic Aviation Risk StandardSHERIEF100% (1)
- MH-60S Multi-Mission Combat Support HelicopterDocument4 paginiMH-60S Multi-Mission Combat Support Helicopterjoma11Încă nu există evaluări
- Spitfire: Precise Card Model 1/48Document4 paginiSpitfire: Precise Card Model 1/48Wil NelsonÎncă nu există evaluări
- Submarine Escape Survivability and Rescue MohundroDocument14 paginiSubmarine Escape Survivability and Rescue Mohundroali alvandiÎncă nu există evaluări
- Sirius: Sensor For Electronic IntelligenceDocument2 paginiSirius: Sensor For Electronic IntelligenceAbdul Maalik100% (1)
- Future of DronesDocument9 paginiFuture of DronesFernando BarbosaÎncă nu există evaluări
- Sonar Introduction 2012 Compressed PDFDocument11 paginiSonar Introduction 2012 Compressed PDFBrenno Moura MouraÎncă nu există evaluări
- Foxtrot Notes - PerformanceDocument16 paginiFoxtrot Notes - PerformanceMartin Goh100% (1)
- Littoral Combat Ship (LCS) and Associated Mission ModulesDocument24 paginiLittoral Combat Ship (LCS) and Associated Mission ModulesGrant SternÎncă nu există evaluări
- Wind - Load - ASCE 7-05Document3 paginiWind - Load - ASCE 7-05Siva ShankarÎncă nu există evaluări
- Personal Essay On Future Career in AviationDocument3 paginiPersonal Essay On Future Career in Aviationapi-29694944071% (7)
- ISUS100Document36 paginiISUS100Mehmet Istemi Karaömer100% (1)
- BLACK-SHARK Torpedo's Stealth and PowerDocument2 paginiBLACK-SHARK Torpedo's Stealth and PowerlaltaputunnnsÎncă nu există evaluări
- Naval Postgraduate School: Monterey, CaliforniaDocument86 paginiNaval Postgraduate School: Monterey, CaliforniaWaleedWaelÎncă nu există evaluări
- CAE MAD-XR DatasheetDocument2 paginiCAE MAD-XR Datasheetrengab100% (1)
- Military Low-Level Flying From F-4 Phantom to F-35 Lightning II: A Pictorial Display of Low Flying in Cumbria and BeyondDe la EverandMilitary Low-Level Flying From F-4 Phantom to F-35 Lightning II: A Pictorial Display of Low Flying in Cumbria and BeyondÎncă nu există evaluări
- ALFA 3000 - Proven Combat System for EEZ Monitoring and Naval OperationsDocument2 paginiALFA 3000 - Proven Combat System for EEZ Monitoring and Naval OperationsGabriel Galmarini100% (1)
- Presentation Mxp2 (C) (Navy) (Air)Document10 paginiPresentation Mxp2 (C) (Navy) (Air)ayoub neffatiÎncă nu există evaluări
- V2 N4 1981 Flanagan Advanced PDFDocument3 paginiV2 N4 1981 Flanagan Advanced PDFraa2010100% (1)
- KRONOS Naval Radar (Mm07664) 2022 2Document2 paginiKRONOS Naval Radar (Mm07664) 2022 2Trung Tran ManhÎncă nu există evaluări
- Materielkommando) and The Odense Lindø Shipyard (Odense Staalskibsværft, A Part of The AP MøllerDocument3 paginiMaterielkommando) and The Odense Lindø Shipyard (Odense Staalskibsværft, A Part of The AP MøllerAlex Borboudakis100% (1)
- Mu90 The LWT For The 21st Century PDFDocument4 paginiMu90 The LWT For The 21st Century PDFbendisudhakar3536100% (1)
- CPP Weapon BombaDocument6 paginiCPP Weapon Bombamario100% (1)
- Verification of 1D Surf Model for Steep BeachesDocument41 paginiVerification of 1D Surf Model for Steep BeachesNini Brevis100% (1)
- Rethinking The Relationship Between Ew and Emso: Journal of Electromagnetic DominanceDocument44 paginiRethinking The Relationship Between Ew and Emso: Journal of Electromagnetic DominanceDIckHEAD100% (1)
- Naval 1Document12 paginiNaval 1Nick NumlkÎncă nu există evaluări
- Mission 05 BriefingDocument20 paginiMission 05 Briefingciccio100% (1)
- 2K12 KUB ModernizationDocument11 pagini2K12 KUB Modernizationsvinche43546100% (1)
- Technology in The Littorals - Below The Surface and In-Shore (Linus)Document24 paginiTechnology in The Littorals - Below The Surface and In-Shore (Linus)mahoro100% (1)
- Tacticos: Combat Management SystemDocument14 paginiTacticos: Combat Management Systemabrahamy lincoln100% (1)
- Evolving The Relationship Trolling ErDocument19 paginiEvolving The Relationship Trolling ErsamlagroneÎncă nu există evaluări
- SUBCODE ASNE07 RevFDocument11 paginiSUBCODE ASNE07 RevFMatt GerdonÎncă nu există evaluări
- AFM - Vol 2 - Generic Enemy (Basic Forces) - Part 3 - OrBATsDocument148 paginiAFM - Vol 2 - Generic Enemy (Basic Forces) - Part 3 - OrBATsPG100% (1)
- F-35 Information FusionDocument22 paginiF-35 Information Fusionmahoro100% (1)
- RAT31DLMDocument2 paginiRAT31DLMJose Luis Magaña Pizarro100% (1)
- Branko Petricevic - Activity of The Hydrographic Institute of The Republic of Croatia and Integrated Hydrographic SystemsDocument23 paginiBranko Petricevic - Activity of The Hydrographic Institute of The Republic of Croatia and Integrated Hydrographic Systemslapost_fer100% (1)
- Ka-32 Helicopters Performance & SpecificationsDocument27 paginiKa-32 Helicopters Performance & Specifications김덕규100% (1)
- Mission 01 Briefing SlidesDocument11 paginiMission 01 Briefing SlidesKalevka Lynch100% (1)
- KRONOS Grand Naval LQ mm07943 PDFDocument2 paginiKRONOS Grand Naval LQ mm07943 PDFsamsulkhoirulanamÎncă nu există evaluări
- PEO Ships Brief To NDIA PDFDocument43 paginiPEO Ships Brief To NDIA PDFjwpaprk1100% (1)
- Bounce Sonar Submarine: Bottom ArrayDocument14 paginiBounce Sonar Submarine: Bottom ArrayBib GmzÎncă nu există evaluări
- THE CGA: A New Tool For The CJMTK Community: AGI User ConferenceDocument22 paginiTHE CGA: A New Tool For The CJMTK Community: AGI User ConferenceKevin CrichlowÎncă nu există evaluări
- 1988 - 2833Document1 pagină1988 - 2833scorpion_l_810% (1)
- A Chaff Cloud ModelisationDocument4 paginiA Chaff Cloud ModelisationAshwani Singh100% (1)
- Swath Bathymetry & Side Scan Sonar: Features & BenefitsDocument2 paginiSwath Bathymetry & Side Scan Sonar: Features & BenefitsRich ManÎncă nu există evaluări
- Need Asthales PDFDocument9 paginiNeed Asthales PDFSunil NinawÎncă nu există evaluări
- Characterisation of Suction Effects On A Submarine Body Operating Near The Free SurfaceDocument4 paginiCharacterisation of Suction Effects On A Submarine Body Operating Near The Free Surfacejwpaprk1Încă nu există evaluări
- The Indian Navy Is A Well Balanced and Cohesive Three Dimensional ForceDocument4 paginiThe Indian Navy Is A Well Balanced and Cohesive Three Dimensional ForceRitesh SehrawatÎncă nu există evaluări
- AW139 Supplement Provides Radar and TCAS DetailsDocument14 paginiAW139 Supplement Provides Radar and TCAS DetailsdugiÎncă nu există evaluări
- Link 22 Guidebook Slides-10oct2018Document3 paginiLink 22 Guidebook Slides-10oct2018hyeonu100% (1)
- Air Traffic Control Career Path GuideDocument41 paginiAir Traffic Control Career Path GuideGAO LEKAUÎncă nu există evaluări
- Emcon PlanDocument1 paginăEmcon PlaneserjeeÎncă nu există evaluări
- PositionedDocument9 paginiPositionedMohamad HaizarÎncă nu există evaluări
- Eagle EyeDocument25 paginiEagle EyeSilambarasan AnumuthuÎncă nu există evaluări
- B1V1000 Introduction To Amphibious OperationsDocument53 paginiB1V1000 Introduction To Amphibious OperationsChris WhiteheadÎncă nu există evaluări
- BMT Caimen 90 Fast DatasheetDocument2 paginiBMT Caimen 90 Fast DatasheetVictor PileggiÎncă nu există evaluări
- Modularity in MCMDocument27 paginiModularity in MCMThinkDefenceÎncă nu există evaluări
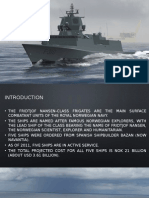
- The Fridtjof Nansen-Class Frigates - Royal Norwegian NavyDocument15 paginiThe Fridtjof Nansen-Class Frigates - Royal Norwegian NavyhindujudaicÎncă nu există evaluări
- Communications Instructions Radiotelephone Procedures: ACP125 (G)Document111 paginiCommunications Instructions Radiotelephone Procedures: ACP125 (G)Victor AndresÎncă nu există evaluări
- Euroflir 350Document2 paginiEuroflir 350Marco Polo0% (1)
- Submarine Torpedo Fire Control ManualDocument66 paginiSubmarine Torpedo Fire Control Manualmav87th-1Încă nu există evaluări
- U.S. Marines In Battle: Al-Qaim, September 2005-March 2006 [Illustrated Edition]De la EverandU.S. Marines In Battle: Al-Qaim, September 2005-March 2006 [Illustrated Edition]Încă nu există evaluări
- Ethiopian Space Science and Technology Institute (Essti) : By: Mahder TamruDocument18 paginiEthiopian Space Science and Technology Institute (Essti) : By: Mahder TamruMahder TamruÎncă nu există evaluări
- Embraer Legacy 650Document17 paginiEmbraer Legacy 650Door URÎncă nu există evaluări
- Quality, Safety & Security Bulletin (Qa) : Relevant FunctionsDocument3 paginiQuality, Safety & Security Bulletin (Qa) : Relevant FunctionsjsesÎncă nu există evaluări
- WIKIPEDIA List of Aviation, Avionics, Aerospace and Aeronautical Abbreviations - WikipediaDocument3 paginiWIKIPEDIA List of Aviation, Avionics, Aerospace and Aeronautical Abbreviations - WikipediaMustafa ElbazÎncă nu există evaluări
- Vimana Critical StudyDocument8 paginiVimana Critical Studyrommy214uÎncă nu există evaluări
- Aircraft Heat ExchangersDocument3 paginiAircraft Heat ExchangersDalibor Stevic100% (1)
- CAR 21 QuestionsDocument11 paginiCAR 21 Questionsmohan reddyÎncă nu există evaluări
- Models Impacted by GPS Rollover Cycles - With Serial Number (S/N) DETAILDocument1 paginăModels Impacted by GPS Rollover Cycles - With Serial Number (S/N) DETAILRanjeet singhÎncă nu există evaluări
- K-Factor Transformers and Nonlinear LoadsDocument3 paginiK-Factor Transformers and Nonlinear Loadsabhi_26tÎncă nu există evaluări
- CP ACC IFR PhraseologyDocument13 paginiCP ACC IFR Phraseologybagarie2Încă nu există evaluări
- Mems 1 16 MarksDocument2 paginiMems 1 16 MarkssubramanikcemechÎncă nu există evaluări
- Papi DataDocument4 paginiPapi DataIfrim PaulÎncă nu există evaluări
- History of Rocketry: From Ancient Fire Arrows to Future SpacecraftDocument37 paginiHistory of Rocketry: From Ancient Fire Arrows to Future SpacecraftGhouse ShaikÎncă nu există evaluări
- FAARFIELD Rigid Incl 3D FEMDocument50 paginiFAARFIELD Rigid Incl 3D FEMTim LinÎncă nu există evaluări
- Designing Zoning of Remote Sensing Drones for Urban ApplicationsDocument8 paginiDesigning Zoning of Remote Sensing Drones for Urban ApplicationsAusa RamadhanÎncă nu există evaluări
- A320 Circuit Breaker ListDocument39 paginiA320 Circuit Breaker Listqureshihakeem2005100% (1)
- SBSP Adc Adc 20180816Document2 paginiSBSP Adc Adc 20180816José SilvaÎncă nu există evaluări
- Mystery of Pan Am Flight 1914Document9 paginiMystery of Pan Am Flight 1914Aesthetic BullShitÎncă nu există evaluări
- Private Pilot WINGS Flight ActivityDocument4 paginiPrivate Pilot WINGS Flight ActivityAlbatros komikliklikÎncă nu există evaluări
- Astm A501 PDFDocument2 paginiAstm A501 PDFgaminÎncă nu există evaluări
- Peak Pressure IndicatorDocument38 paginiPeak Pressure IndicatorGiovanniJara100% (1)
- Eurofighter World 2016-07 PDFDocument27 paginiEurofighter World 2016-07 PDFamenendezamÎncă nu există evaluări































































![U.S. Marines In Battle: Al-Qaim, September 2005-March 2006 [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/259899129/149x198/e678da9b6e/1617227775?v=1)