S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
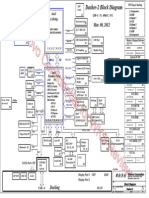
- x230 SchematicsDocument101 paginix230 Schematicsangga_scribdÎncă nu există evaluări
- Computer BasicsDocument206 paginiComputer Basicszipzapdhoom67% (3)
- 6502 User ManualDocument52 pagini6502 User ManualOmar KhayyamÎncă nu există evaluări
- Career Related InfoDocument13 paginiCareer Related Infoumar khanÎncă nu există evaluări
- Taxation Mid Term Paper Fall 2020Document3 paginiTaxation Mid Term Paper Fall 2020umar khanÎncă nu există evaluări
- Project Name: Umar+Project: Created With PV Sol Premium 2021 (R4) Valentin Software GMBHDocument37 paginiProject Name: Umar+Project: Created With PV Sol Premium 2021 (R4) Valentin Software GMBHumar khanÎncă nu există evaluări
- Assignment 1 2020 PDFDocument1 paginăAssignment 1 2020 PDFumar khanÎncă nu există evaluări
- EE 553 High Voltage Engineering Assignment # 1Document1 paginăEE 553 High Voltage Engineering Assignment # 1umar khanÎncă nu există evaluări
- EE 553-High Voltage Engineering-Muhammad Iqbal Qureshi PDFDocument3 paginiEE 553-High Voltage Engineering-Muhammad Iqbal Qureshi PDFumar khanÎncă nu există evaluări
- Quiz # 5 High Voltage Engineering EE-553 Department of Electrical Engineering, SBASSE LUMS, LahoreDocument1 paginăQuiz # 5 High Voltage Engineering EE-553 Department of Electrical Engineering, SBASSE LUMS, Lahoreumar khanÎncă nu există evaluări
- Lahore University of Management Sciences EE 556 Power System Planning Time 15 Minutes Roll Number Marks: 10Document2 paginiLahore University of Management Sciences EE 556 Power System Planning Time 15 Minutes Roll Number Marks: 10umar khanÎncă nu există evaluări
- Assignment 5 - 2008 - Solution - 2Document11 paginiAssignment 5 - 2008 - Solution - 2umar khanÎncă nu există evaluări
- Assignment 5 PDFDocument2 paginiAssignment 5 PDFumar khanÎncă nu există evaluări
- Ee453: Power System Protection and Stability: Farhan Mahmood, PHD Department of Electrical Engineering Uet, LahoreDocument26 paginiEe453: Power System Protection and Stability: Farhan Mahmood, PHD Department of Electrical Engineering Uet, Lahoreumar khanÎncă nu există evaluări
- Lec 15 16Document26 paginiLec 15 16umar khanÎncă nu există evaluări
- Assignment-1 MATH 371 (Fall 2018)Document5 paginiAssignment-1 MATH 371 (Fall 2018)umar khanÎncă nu există evaluări
- CS 200 Lab1 ManualDocument7 paginiCS 200 Lab1 Manualumar khanÎncă nu există evaluări
- 16-311: Introduction To Robotics Mid-Term Examination Spring 2007 Professor Howie Choset SolutionsDocument8 pagini16-311: Introduction To Robotics Mid-Term Examination Spring 2007 Professor Howie Choset Solutionsumar khanÎncă nu există evaluări
- Introduction To Robotics - MidtermDocument9 paginiIntroduction To Robotics - Midtermumar khanÎncă nu există evaluări
- EC8681-Microprocessors and Microcontrollers Lab ManualDocument95 paginiEC8681-Microprocessors and Microcontrollers Lab ManualMesmar Prasanna0% (1)
- Week 6 (New)Document54 paginiWeek 6 (New)api-3824692Încă nu există evaluări
- Vehicle Software Upgrade: USB Installation - Full InstructionsDocument3 paginiVehicle Software Upgrade: USB Installation - Full InstructionsbganongÎncă nu există evaluări
- Panda Systems ManagementDocument10 paginiPanda Systems ManagementFakhri HashfiÎncă nu există evaluări
- Microprocesadores: AMD Socket AM1Document5 paginiMicroprocesadores: AMD Socket AM1SabriÎncă nu există evaluări
- Data Is Raw Material Used As Input and Information Is Processed Data ObtainedDocument2 paginiData Is Raw Material Used As Input and Information Is Processed Data ObtainedHimanshuRanaÎncă nu există evaluări
- Contoh Surat MailingsDocument8 paginiContoh Surat MailingsGatot FebrianoÎncă nu există evaluări
- Real-Time Operating Systems: "Open Rtlinux"Document7 paginiReal-Time Operating Systems: "Open Rtlinux"Alecs Ion MateiÎncă nu există evaluări
- CO UNIT-2 NotesDocument35 paginiCO UNIT-2 NotesAmber HeardÎncă nu există evaluări
- Wibubox/Ru+: Description Certificates Ce-Conformity - European CertificatesDocument2 paginiWibubox/Ru+: Description Certificates Ce-Conformity - European CertificatesRoan Roan RuanÎncă nu există evaluări
- Q.Code: 161101 Reg - No.Document2 paginiQ.Code: 161101 Reg - No.E Mohammed IbrahimÎncă nu există evaluări
- Processors Used in SOCsDocument25 paginiProcessors Used in SOCsA B ShindeÎncă nu există evaluări
- ITCS AssignmentDocument15 paginiITCS AssignmentNuhuMabiriiziÎncă nu există evaluări
- HP Compaq 6005 Pro Business PC Quick SpecsDocument58 paginiHP Compaq 6005 Pro Business PC Quick Specschristopher ng'ang'a kamauÎncă nu există evaluări
- 3 Types of StorageDocument23 pagini3 Types of StorageJustz CollectsÎncă nu există evaluări
- Greendroid SeminarDocument20 paginiGreendroid SeminarSourav SasidharanÎncă nu există evaluări
- Cervoz - Industrial - SSD - 2.5inch - PATA - M120 - Datasheet - Rev2.0Document12 paginiCervoz - Industrial - SSD - 2.5inch - PATA - M120 - Datasheet - Rev2.0Butterfly DraculaÎncă nu există evaluări
- Datamax I Class Parts ListDocument24 paginiDatamax I Class Parts ListJason JacobsÎncă nu există evaluări
- SEMB ZG 513 Embedded System DesignDocument5 paginiSEMB ZG 513 Embedded System DesignSakthi VelÎncă nu există evaluări
- Flashing A Custom Rom Xperia ArcDocument2 paginiFlashing A Custom Rom Xperia ArcEverton KozloskiÎncă nu există evaluări
- N50 Implen NanoPhotometer Data SheetDocument2 paginiN50 Implen NanoPhotometer Data SheetZhang NickÎncă nu există evaluări
- 8085 MicroprocessorDocument13 pagini8085 MicroprocessorDeepak kumarÎncă nu există evaluări
- Ee6008 Microcontroller Based System Designl Question BankDocument4 paginiEe6008 Microcontroller Based System Designl Question BankAnbalagan GuruÎncă nu există evaluări
- Lecture 4 COMP2611 ISA Part1Document32 paginiLecture 4 COMP2611 ISA Part1jnfzÎncă nu există evaluări
- CCC Exam PMPDocument108 paginiCCC Exam PMPdahiphalehÎncă nu există evaluări
- PEX8747 Product Brief V1!0!20oct10Document4 paginiPEX8747 Product Brief V1!0!20oct10Malka RavikrishnaÎncă nu există evaluări
- Computer Organization PracticalsDocument45 paginiComputer Organization PracticalsTapan33% (3)