S-ar putea să vă placă și
- Advanced Process Control: Beyond Single Loop ControlDe la EverandAdvanced Process Control: Beyond Single Loop ControlÎncă nu există evaluări
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneDe la EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneÎncă nu există evaluări
- PID Loop Tuning Guide Control Soft DS405v21 020405Document4 paginiPID Loop Tuning Guide Control Soft DS405v21 020405NAPZ69Încă nu există evaluări
- Pid ControllersDocument132 paginiPid Controllers14071988Încă nu există evaluări
- What Is PID - TutorialDocument5 paginiWhat Is PID - Tutorialsocrates19582405Încă nu există evaluări
- Smith Predictor Desc enDocument8 paginiSmith Predictor Desc entalljatÎncă nu există evaluări
- Hitachi Inverter PID Control Users' GuideDocument16 paginiHitachi Inverter PID Control Users' GuideMirinhaeThiago RosárioÎncă nu există evaluări
- How To Manually Tune A Three-Mode PID ControllerDocument5 paginiHow To Manually Tune A Three-Mode PID ControllerlorenzoÎncă nu există evaluări
- PID Control Manual 6540Document26 paginiPID Control Manual 6540Lizandro ZapataÎncă nu există evaluări
- Advantage and Disadvantage of PIDDocument6 paginiAdvantage and Disadvantage of PIDNathaniel PascuaÎncă nu există evaluări
- Acfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnDocument40 paginiAcfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnMOHAMED THARIKÎncă nu există evaluări
- Mesb333 Pid ControlDocument13 paginiMesb333 Pid ControlMohd KhairiÎncă nu există evaluări
- PID Control PID Control: Session Outlines & Objectives Session Outlines & ObjectivesDocument24 paginiPID Control PID Control: Session Outlines & Objectives Session Outlines & ObjectivesOwais100% (2)
- Tuning Workshop PID Controllers: Shell Global SolutionsDocument33 paginiTuning Workshop PID Controllers: Shell Global SolutionsP Pablo CardenasÎncă nu există evaluări
- CH 8Document81 paginiCH 8kfaliÎncă nu există evaluări
- XC9572 In-System Programmable CPLD: Features DescriptionDocument9 paginiXC9572 In-System Programmable CPLD: Features DescriptionManish PushkarÎncă nu există evaluări
- Introduction To The Key Terms Associated With PID Temperature ControlDocument8 paginiIntroduction To The Key Terms Associated With PID Temperature ControlBộ Môn DieuKhienhoc100% (1)
- APPLICATION GUIDE - PID FunctionDocument43 paginiAPPLICATION GUIDE - PID FunctioniedmondÎncă nu există evaluări
- UAV Tech - PID Tuning PrinciplesDocument8 paginiUAV Tech - PID Tuning PrinciplesJavier Alonso MadridÎncă nu există evaluări
- User's Manual: FDC 4100 / 7100 / 8100 / 9100 Auto-Tune Fuzzy / PID Process / Temperature ControllerDocument60 paginiUser's Manual: FDC 4100 / 7100 / 8100 / 9100 Auto-Tune Fuzzy / PID Process / Temperature ControllerkmpoulosÎncă nu există evaluări
- Control Strategy, Selective Control SystemDocument10 paginiControl Strategy, Selective Control SystemHutama Putra WibawaÎncă nu există evaluări
- Manual For IA Controlers V6Document60 paginiManual For IA Controlers V6Bharadwaj SubramanianÎncă nu există evaluări
- Pid Tuning OperatorDocument18 paginiPid Tuning OperatorkarmoweldingÎncă nu există evaluări
- LG Surucu Ig5Document16 paginiLG Surucu Ig5uyung_mustofaÎncă nu există evaluări
- Sitrain s7-1200 PWM - PidDocument46 paginiSitrain s7-1200 PWM - Pidleningfe100% (3)
- PracticalDocument10 paginiPracticalSec ArcÎncă nu există evaluări
- Bayer CLINITEC 500 Urine Chemistry Analyzer Service ManualDocument322 paginiBayer CLINITEC 500 Urine Chemistry Analyzer Service Manualtunet1106Încă nu există evaluări
- App PIDDocument12 paginiApp PIDP Praveen KumarÎncă nu există evaluări
- Name: Roll: Year: Department: Subject: Subject CodeDocument11 paginiName: Roll: Year: Department: Subject: Subject CodeMayukh BiswasÎncă nu există evaluări
- What Is PID-Tutorial Overview: Proportional Band Integral DerivativeDocument5 paginiWhat Is PID-Tutorial Overview: Proportional Band Integral Derivativethenu.chandru1042Încă nu există evaluări
- LG VFD Drive ManualDocument16 paginiLG VFD Drive ManualrnkmipÎncă nu există evaluări
- Course Outline: DGU3073 Process Instrumentation & ControlDocument66 paginiCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinÎncă nu există evaluări
- Instruction Manual: Pid Based Pressure Loop TrainerDocument28 paginiInstruction Manual: Pid Based Pressure Loop TrainerKiran BennyÎncă nu există evaluări
- Process Control and Common TermsDocument210 paginiProcess Control and Common TermsGeorge Markas100% (1)
- Ls Inverter Ic5Document20 paginiLs Inverter Ic5lamonahÎncă nu există evaluări
- Ge - TC100Document4 paginiGe - TC100cbmanausÎncă nu există evaluări
- Ziegler-Nichols Closed-Loop Tuning Method - Control Notes PDFDocument5 paginiZiegler-Nichols Closed-Loop Tuning Method - Control Notes PDFDraganÎncă nu există evaluări
- Yokogawa Centum VP Standard OperationDocument16 paginiYokogawa Centum VP Standard OperationAnonymous zMWvcT100% (2)
- Macom@cnt 35 96Document3 paginiMacom@cnt 35 96Cesar GomezÎncă nu există evaluări
- Implementing A PID Controller Using A PICDocument15 paginiImplementing A PID Controller Using A PICJavier CharrezÎncă nu există evaluări
- Operator 2011Document68 paginiOperator 2011romulooliveiraaraujo100% (1)
- Working or Operation of PID ControllerDocument7 paginiWorking or Operation of PID Controllerjohn glenn magnoÎncă nu există evaluări
- Fuzzy Controller X: Instruction ManualDocument98 paginiFuzzy Controller X: Instruction ManualOla SkeikÎncă nu există evaluări
- Release NotesDocument6 paginiRelease Notesikhtiyar ali khanÎncă nu există evaluări
- General Specifications: GS 33K05D10-50EDocument16 paginiGeneral Specifications: GS 33K05D10-50Esarfaraz055Încă nu există evaluări
- Lambda Tuning TAPPIDocument12 paginiLambda Tuning TAPPIMariana Alejandra Quioy Woods100% (1)
- Closed-Loop Control Toolbox APP-RTT-E-GBDocument11 paginiClosed-Loop Control Toolbox APP-RTT-E-GBLuis Enrique PariapazaÎncă nu există evaluări
- DX-610 626 (Eum-L)Document12 paginiDX-610 626 (Eum-L)escuela_danza_2Încă nu există evaluări
- Anti Pid WindupDocument14 paginiAnti Pid WindupgirijashankarÎncă nu există evaluări
- Process ControlDocument24 paginiProcess ControlEr Shubham RaksheÎncă nu există evaluări
- White Paper PID Control in Vacuum Systems - Final 2020Document4 paginiWhite Paper PID Control in Vacuum Systems - Final 2020giselleÎncă nu există evaluări
- En00w4 2011Document45 paginiEn00w4 2011knightfelix12Încă nu există evaluări
- Features of Practical PID ControllersDocument8 paginiFeatures of Practical PID ControllersGeorge MarkasÎncă nu există evaluări
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsDe la EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsÎncă nu există evaluări
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosDe la EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosEvaluare: 5 din 5 stele5/5 (1)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDe la EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGÎncă nu există evaluări
- Control of DC Motor Using Different Control StrategiesDe la EverandControl of DC Motor Using Different Control StrategiesÎncă nu există evaluări
- Ibtphem Course Flyer and Application 2020Document3 paginiIbtphem Course Flyer and Application 2020Kj_bdÎncă nu există evaluări
- E1 NLPDocument2 paginiE1 NLPKj_bdÎncă nu există evaluări
- Dynamic System Models ShortDocument19 paginiDynamic System Models ShortKj_bdÎncă nu există evaluări
- Fire Safety Basic Series Flyer TB1Document1 paginăFire Safety Basic Series Flyer TB1Kj_bdÎncă nu există evaluări
- 802Document29 pagini802Kj_bdÎncă nu există evaluări
- Lecture Note 2: Configuration Space: ECE5463: Introduction To RoboticsDocument19 paginiLecture Note 2: Configuration Space: ECE5463: Introduction To RoboticsKj_bdÎncă nu există evaluări
- Application of Geographical Information System (GIS) Technology in The Control of Buruli Ulcer in GhanaDocument9 paginiApplication of Geographical Information System (GIS) Technology in The Control of Buruli Ulcer in GhanaKj_bdÎncă nu există evaluări
- Siemens Overview For Factory Mounted Ps2'SDocument1 paginăSiemens Overview For Factory Mounted Ps2'SKj_bdÎncă nu există evaluări
- Positioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDDocument1 paginăPositioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDKj_bdÎncă nu există evaluări
- Positioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDDocument1 paginăPositioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDKj_bdÎncă nu există evaluări
- Siemens PS2: Installation and F.A.Q.'SDocument1 paginăSiemens PS2: Installation and F.A.Q.'SKj_bdÎncă nu există evaluări
- Functional Upgrade: SiemensDocument1 paginăFunctional Upgrade: SiemensKj_bdÎncă nu există evaluări
- Siemens PS2: Installation and F.A.Q.'SDocument1 paginăSiemens PS2: Installation and F.A.Q.'SKj_bdÎncă nu există evaluări
- Siemens Overview For Factory Mounted Ps2'S: Figure 7 Display WindowDocument1 paginăSiemens Overview For Factory Mounted Ps2'S: Figure 7 Display WindowKj_bdÎncă nu există evaluări
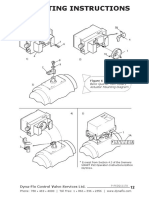
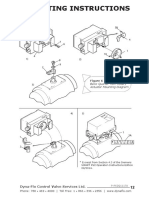
- Mounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramDocument1 paginăMounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramKj_bdÎncă nu există evaluări
- 9758-Article Text-17770-2-10-20190313Document15 pagini9758-Article Text-17770-2-10-20190313Kj_bdÎncă nu există evaluări
- Mounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramDocument1 paginăMounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramKj_bdÎncă nu există evaluări
- Green Tyre TechnologyDocument4 paginiGreen Tyre TechnologyAnuj SharmaÎncă nu există evaluări
- Rhea Huddleston For Supervisor - 17467 - DR2Document1 paginăRhea Huddleston For Supervisor - 17467 - DR2Zach EdwardsÎncă nu există evaluări
- Technical Schedule World BankDocument249 paginiTechnical Schedule World BankPramod ShastryÎncă nu există evaluări
- Bitmicro Case Complainants PositionDocument19 paginiBitmicro Case Complainants PositionNoy SorianoÎncă nu există evaluări
- MetasploitDocument9 paginiMetasploitDhamlo KheralaÎncă nu există evaluări
- Land Surveying Chapter 2 Leveling p1Document66 paginiLand Surveying Chapter 2 Leveling p1Azrul ZulwaliÎncă nu există evaluări
- What Is Highway EngineeringDocument4 paginiWhat Is Highway EngineeringNagesh SinghÎncă nu există evaluări
- CIVPRO - Case Compilation No. 2Document95 paginiCIVPRO - Case Compilation No. 2Darla GreyÎncă nu există evaluări
- Mid Semester Question Paper Programming in CDocument8 paginiMid Semester Question Paper Programming in CbakaÎncă nu există evaluări
- PDF of Proposed Museum ProjectDocument145 paginiPDF of Proposed Museum ProjectHarshita ParnamiÎncă nu există evaluări
- Exp.1 (Screening) Group1Document16 paginiExp.1 (Screening) Group1itokki otoyaÎncă nu există evaluări
- Corrugated Horn AntennasDocument4 paginiCorrugated Horn AntennasmiusayÎncă nu există evaluări
- Unilift de DGDDocument36 paginiUnilift de DGDLove SemsemÎncă nu există evaluări
- National School Building Inventory (NSBI) Encoding For SY 2021-2022Document31 paginiNational School Building Inventory (NSBI) Encoding For SY 2021-2022Renato Rivera100% (1)
- GROZ Tools & Equipment 2018Document3 paginiGROZ Tools & Equipment 2018ayush bansalÎncă nu există evaluări
- Tween 80 CoADocument1 paginăTween 80 CoATấn Huy HồÎncă nu există evaluări
- Chennai CMDA Master Plan 2026 Volume 3 Sectorial BackgroundDocument270 paginiChennai CMDA Master Plan 2026 Volume 3 Sectorial BackgroundMalathi Kathirvel100% (1)
- Ten Rules of NetiquetteDocument11 paginiTen Rules of NetiquetteAriel CancinoÎncă nu există evaluări
- Lecture6 - RPGT Class Exercise QDocument4 paginiLecture6 - RPGT Class Exercise QpremsuwaatiiÎncă nu există evaluări
- School MemoDocument1 paginăSchool MemoBellaÎncă nu există evaluări
- Corality ModelOff Sample Answer Hard TimesDocument81 paginiCorality ModelOff Sample Answer Hard TimesserpepeÎncă nu există evaluări
- Bonus 6 - Mastering ASP - NET Core SecurityDocument147 paginiBonus 6 - Mastering ASP - NET Core SecurityDark Shadow100% (1)
- 2011 Hyundai Service FiltersDocument18 pagini2011 Hyundai Service FiltersTan JaiÎncă nu există evaluări
- ColgateDocument32 paginiColgategargatworkÎncă nu există evaluări
- Procter & Gamble Global Geothermal Screening Study FINAL 9 Feb 2023Document56 paginiProcter & Gamble Global Geothermal Screening Study FINAL 9 Feb 2023Mohammad Syahir JamaluddinÎncă nu există evaluări
- 2 SpecificationDocument20 pagini2 Specificationprithvi614710Încă nu există evaluări
- PCIB Vs Escolin DigestDocument3 paginiPCIB Vs Escolin DigestsamontedianneÎncă nu există evaluări
- Difference Between Art. 128 and 129 of The Labor CodeDocument3 paginiDifference Between Art. 128 and 129 of The Labor CodeKarl0% (1)
- BeechDocument1 paginăBeechperovojÎncă nu există evaluări
- Eco SPARDocument3 paginiEco SPARMohammad LabinÎncă nu există evaluări