S-ar putea să vă placă și
- E-Stim Estim Daveys - Box PDFDocument23 paginiE-Stim Estim Daveys - Box PDFPeter Cohen67% (3)
- HAARP InfoDocument7 paginiHAARP InfoThomas BoncioÎncă nu există evaluări
- Cf.966h Sist - Elect.Document25 paginiCf.966h Sist - Elect.rmatico1234100% (5)
- Cascade ControlDocument10 paginiCascade ControlManoj RajagopalanÎncă nu există evaluări
- Controlled Variable Manipulated Variable Controlle R Type /scheme Gproms Model/Process NameDocument5 paginiControlled Variable Manipulated Variable Controlle R Type /scheme Gproms Model/Process NameJoseph OrjiÎncă nu există evaluări
- #Alignment Guide - VibralignDocument280 pagini#Alignment Guide - VibralignCyrix.OneÎncă nu există evaluări
- Batch Distillation ExperimentsDocument29 paginiBatch Distillation Experimentsytconstance50% (4)
- Cooling Tower PDFDocument7 paginiCooling Tower PDFShahid HussainÎncă nu există evaluări
- Mmel DHC6Document65 paginiMmel DHC6Celin Concha AranedaÎncă nu există evaluări
- Basic Temperature Control SystemDocument26 paginiBasic Temperature Control SystemRajeev ValunjkarÎncă nu există evaluări
- Stiction: The Hidden Menace: How To Recognize This Most Difficult Cause of Loop CyclingDocument16 paginiStiction: The Hidden Menace: How To Recognize This Most Difficult Cause of Loop CyclingctsakÎncă nu există evaluări
- Flow ElementDocument66 paginiFlow ElementTej Bahadur KushwahaÎncă nu există evaluări
- Cameroon University Course on Process Instrumentation and ControlDocument41 paginiCameroon University Course on Process Instrumentation and ControlFRANCK DAMSSSÎncă nu există evaluări
- PDC Question BankDocument15 paginiPDC Question BankHardik PatoliyaÎncă nu există evaluări
- Boiler Drum Level Control StrategiesDocument22 paginiBoiler Drum Level Control Strategiestinuvalsapaul100% (1)
- Process Control LoopDocument76 paginiProcess Control Loopsumanroyal100% (2)
- Bearing Root Cause Failure Analysis - Per Arnold - BRCE2016 PDFDocument85 paginiBearing Root Cause Failure Analysis - Per Arnold - BRCE2016 PDFrfriosEP100% (1)
- Process Dynamics & Control: Muhammad Rashed JavedDocument27 paginiProcess Dynamics & Control: Muhammad Rashed JavedTalha ImtiazÎncă nu există evaluări
- Overcoming Control Valve Trim Selection ChallengeDocument10 paginiOvercoming Control Valve Trim Selection Challengeprasad durgaÎncă nu există evaluări
- Industrial Cybersecurity: Volume 2 - AprilDocument29 paginiIndustrial Cybersecurity: Volume 2 - AprilchandraÎncă nu există evaluări
- SOLID-LIQUID EXTRACTIONDocument11 paginiSOLID-LIQUID EXTRACTIONFakhirah Ahmad BasriÎncă nu există evaluări
- DCS SystemDocument19 paginiDCS Systemubaid100% (1)
- Flow Measurement Techniques and ApplicationsDocument54 paginiFlow Measurement Techniques and ApplicationssourajpatelÎncă nu există evaluări
- Iso Batch ReactorDocument10 paginiIso Batch ReactorSakethBharadwajÎncă nu există evaluări
- 2) Introduction To Control ValveDocument30 pagini2) Introduction To Control ValveChampKab0% (1)
- 11process Control Fundamentals PDFDocument59 pagini11process Control Fundamentals PDFshubhamÎncă nu există evaluări
- Multivariable Control SystemDocument21 paginiMultivariable Control SystemFforever'Yee ChengÎncă nu există evaluări
- CM20190529 6e8f4 E408f PDFDocument263 paginiCM20190529 6e8f4 E408f PDFJorge Luis Tanaka ConchaÎncă nu există evaluări
- Surface Movement Radar 0Document6 paginiSurface Movement Radar 0rainatkmÎncă nu există evaluări
- Cascade Control PDFDocument4 paginiCascade Control PDFjhuskanovicÎncă nu există evaluări
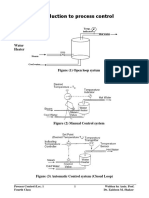
- Lect 1 Introduction To Process ControlDocument4 paginiLect 1 Introduction To Process ControlZaidoon MohsinÎncă nu există evaluări
- How Coriolis Flow Meters WorkDocument4 paginiHow Coriolis Flow Meters WorkIsares PodkohÎncă nu există evaluări
- Cascade Control: (Chap 9 in Book and 10 in Edition 2)Document6 paginiCascade Control: (Chap 9 in Book and 10 in Edition 2)yungPÎncă nu există evaluări
- The Effect of Pi and Pid Controllers On Flow Control SystemDocument16 paginiThe Effect of Pi and Pid Controllers On Flow Control SystemahedooohÎncă nu există evaluări
- Process Control Fundamentals for Continuous OperationsDocument21 paginiProcess Control Fundamentals for Continuous Operationsحاتم غيدان خلفÎncă nu există evaluări
- Why Effective Process Control is Required for Safety, Quality and ProfitDocument6 paginiWhy Effective Process Control is Required for Safety, Quality and ProfitSebastien PaulÎncă nu există evaluări
- Process Control B.SDocument437 paginiProcess Control B.Sram uo100% (1)
- Breakdown Characteristics of Air GapsDocument9 paginiBreakdown Characteristics of Air GapsChamath KirindeÎncă nu există evaluări
- Lecture 6 1Document24 paginiLecture 6 1Dany LoboÎncă nu există evaluări
- Cascade Control BasicsDocument2 paginiCascade Control Basicsjsrplc7952Încă nu există evaluări
- Cascade Control SE665Document20 paginiCascade Control SE665NurulFarihahMohdZulkefleÎncă nu există evaluări
- Level Process Control SystemDocument10 paginiLevel Process Control SystemnajihahÎncă nu există evaluări
- Control Lab ReportDocument11 paginiControl Lab ReportMariamMunirAhmad100% (1)
- CPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportDocument24 paginiCPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportSiti Hajar Mohamed100% (1)
- Experiment 1 - Process Control RigDocument15 paginiExperiment 1 - Process Control Rigzimbabwe100Încă nu există evaluări
- 3 Element ControlDocument5 pagini3 Element Controlugun87Încă nu există evaluări
- Lab Report CompleteDocument30 paginiLab Report Completefahadfiaz0% (1)
- Temperature Process RigDocument9 paginiTemperature Process RigHafiz TanveerÎncă nu există evaluări
- Level Flow ControlDocument6 paginiLevel Flow Controlarpit gargÎncă nu există evaluări
- Azeotropic Mass BalanceDocument25 paginiAzeotropic Mass BalancesowjanyaavkÎncă nu există evaluări
- Control System - Closed Loop Open Loop Control SystemDocument9 paginiControl System - Closed Loop Open Loop Control SystemSiva B PositiveÎncă nu există evaluări
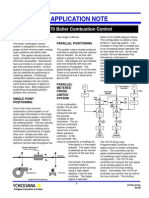
- YS170 Boiler Combustion Control Application NoteDocument2 paginiYS170 Boiler Combustion Control Application NoteSergio GonzalesÎncă nu există evaluări
- Comparison of Residence Time in Different Types of ReactorsDocument4 paginiComparison of Residence Time in Different Types of ReactorswaqaskhanÎncă nu există evaluări
- Electro-Pneumatics: Understanding Pneumatic and Electro-Pneumatic Elements for Automation ControlDocument30 paginiElectro-Pneumatics: Understanding Pneumatic and Electro-Pneumatic Elements for Automation ControlPrakash KumarÎncă nu există evaluări
- Density Compensation For Steam Drum Level MeasurementDocument4 paginiDensity Compensation For Steam Drum Level MeasurementsaravananbscelecÎncă nu există evaluări
- Lab Report TPP Experiment 3Document10 paginiLab Report TPP Experiment 3Nurul Najwa100% (1)
- Experiment 7 Cooling TowerDocument9 paginiExperiment 7 Cooling TowerRicky Jay0% (1)
- Level Control Trainer FinalDocument6 paginiLevel Control Trainer FinalSiddhartha SharmaÎncă nu există evaluări
- Tutorial 9 Solutions 1Document5 paginiTutorial 9 Solutions 1Henry TranÎncă nu există evaluări
- Cavitation and Flashing Effects in Fluid FlowDocument90 paginiCavitation and Flashing Effects in Fluid FlowSureshbabu ThamburajÎncă nu există evaluări
- Absorption Lecture Note - DR Akinsiku PDFDocument7 paginiAbsorption Lecture Note - DR Akinsiku PDFGlory UsoroÎncă nu există evaluări
- Lab Report 1 Tray DrierDocument7 paginiLab Report 1 Tray Drier_never_mind_100% (1)
- Experiment 6 - Level Flow Trainer (Wlf922)Document11 paginiExperiment 6 - Level Flow Trainer (Wlf922)Abdul AzimÎncă nu există evaluări
- Boiling Heat Transfer ExpDocument22 paginiBoiling Heat Transfer ExpMahesh Vp0% (1)
- To Study The Characteristic Curve of Centrifugal Compressor.Document19 paginiTo Study The Characteristic Curve of Centrifugal Compressor.mustapai2250% (2)
- Colling Tower: Mechanical Lab / Exp. NO.Document10 paginiColling Tower: Mechanical Lab / Exp. NO.Dalal Salih100% (1)
- Example of PID Tuning ExampleDocument31 paginiExample of PID Tuning Examplemhd badhrul bin baharÎncă nu există evaluări
- Cascade LoopDocument6 paginiCascade LoopAhmed EldosokyÎncă nu există evaluări
- Controlling Boiler Drum LevelDocument6 paginiControlling Boiler Drum LevelMourougapragash Subramanian100% (2)
- Cascade ControlDocument20 paginiCascade Controlthesimpleguy6Încă nu există evaluări
- #Grace PESD's NFPA-70EDocument12 pagini#Grace PESD's NFPA-70ECyrix.OneÎncă nu există evaluări
- Generator Set Operator & Maintenance Instruction ManualDocument61 paginiGenerator Set Operator & Maintenance Instruction ManualAlejandro Salas VásquezÎncă nu există evaluări
- Ctrl-Eng Micro-Motion 45yrsDocument16 paginiCtrl-Eng Micro-Motion 45yrsCyrix.OneÎncă nu există evaluări
- #CAT Genset Overcurrent ProtectionDocument4 pagini#CAT Genset Overcurrent ProtectionCyrix.OneÎncă nu există evaluări
- #Boiler Tubes Failure - B&WDocument10 pagini#Boiler Tubes Failure - B&WCyrix.OneÎncă nu există evaluări
- #CAT Genset SizingDocument9 pagini#CAT Genset SizingCyrix.OneÎncă nu există evaluări
- #Boiler Cycling ConsiderationsDocument8 pagini#Boiler Cycling ConsiderationsCyrix.OneÎncă nu există evaluări
- #GE-LM6K Sprint WTR Purity RequerimentsDocument5 pagini#GE-LM6K Sprint WTR Purity RequerimentsCyrix.OneÎncă nu există evaluări
- #Capstone ΜGT C30Document2 pagini#Capstone ΜGT C30Cyrix.OneÎncă nu există evaluări
- MM Pressure Regulator Catalogue - E (1) 015-PCV-588Document32 paginiMM Pressure Regulator Catalogue - E (1) 015-PCV-588Do PhanÎncă nu există evaluări
- #Boiler Tubes Failure - B&WDocument10 pagini#Boiler Tubes Failure - B&WCyrix.OneÎncă nu există evaluări
- #Boiler Cycling ConsiderationsDocument8 pagini#Boiler Cycling ConsiderationsCyrix.OneÎncă nu există evaluări
- #Boiler Flow Measurement - SierraDocument9 pagini#Boiler Flow Measurement - SierraCyrix.OneÎncă nu există evaluări
- #Boiler Cycling ConsiderationsDocument8 pagini#Boiler Cycling ConsiderationsCyrix.OneÎncă nu există evaluări
- #BN-Orbit60 Fact SheetDocument1 pagină#BN-Orbit60 Fact SheetCyrix.OneÎncă nu există evaluări
- Planejamento e CronogramasDocument4 paginiPlanejamento e CronogramasBruno Garcia Do AmaralÎncă nu există evaluări
- CR16 TE1W: 1/ GeneralDocument3 paginiCR16 TE1W: 1/ GeneralPowerTechÎncă nu există evaluări
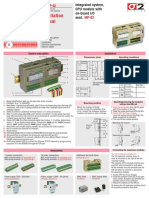
- Installation manual for CPU module with on-board I/ODocument6 paginiInstallation manual for CPU module with on-board I/OCyrix.OneÎncă nu există evaluări
- Sigma Micro: Due PAC MP-02 Quick GuideDocument24 paginiSigma Micro: Due PAC MP-02 Quick GuideCyrix.OneÎncă nu există evaluări
- #Bray Trilok AdvantagesDocument2 pagini#Bray Trilok AdvantagesCyrix.OneÎncă nu există evaluări
- Performance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageDocument1 paginăPerformance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageAbduallah AmarÎncă nu există evaluări
- Performance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageDocument1 paginăPerformance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageAbduallah AmarÎncă nu există evaluări
- #Ascon AC3 Adv CTRL System - Ver.07Document160 pagini#Ascon AC3 Adv CTRL System - Ver.07Cyrix.OneÎncă nu există evaluări
- 6 MistakesDocument6 pagini6 MistakesHBracing1100% (1)
- #ASCO Timing Delays 4 ATS'sDocument8 pagini#ASCO Timing Delays 4 ATS'sCyrix.OneÎncă nu există evaluări
- #ASUS AMD CrossHair VIII - HERODocument110 pagini#ASUS AMD CrossHair VIII - HEROCyrix.OneÎncă nu există evaluări
- Medidores Magneticos - IFM PDFDocument6 paginiMedidores Magneticos - IFM PDFEduardo_77Încă nu există evaluări
- Novo Documento Do Microsoft Office WordDocument9 paginiNovo Documento Do Microsoft Office WordVictor José PauloÎncă nu există evaluări
- Speed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM)Document7 paginiSpeed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM)S.Dharanipathy100% (1)
- Insulation TestingDocument21 paginiInsulation TestingQaisar ShafiÎncă nu există evaluări
- PIC18F13K22 DatasheetDocument382 paginiPIC18F13K22 DatasheettomÎncă nu există evaluări
- Transfero T EN Low PDFDocument12 paginiTransfero T EN Low PDFLucas Penalva Costa SerraÎncă nu există evaluări
- Tuv 15W SLVDocument2 paginiTuv 15W SLVWilliam N. CalfaÎncă nu există evaluări
- Acpc 2015 TextDocument2 paginiAcpc 2015 TextHardik DoshiÎncă nu există evaluări
- ANT ATD4516R5 2031 DatasheetDocument4 paginiANT ATD4516R5 2031 Datasheetangga meas100% (2)
- McAfee device backup process ESM incremental fullDocument11 paginiMcAfee device backup process ESM incremental fullabbuasherÎncă nu există evaluări
- Power Contactor 1250 A - HubbellDocument4 paginiPower Contactor 1250 A - Hubbellmanuel99a2kÎncă nu există evaluări
- Solid-state Timer Guide for H3DE SeriesDocument33 paginiSolid-state Timer Guide for H3DE SeriesHemraj Singh RautelaÎncă nu există evaluări
- Sifang Csc-100eb v1.09 Line Protection Ied Manual 2022-12Document514 paginiSifang Csc-100eb v1.09 Line Protection Ied Manual 2022-12MarkusKunÎncă nu există evaluări
- BJ - Cable Type - EN - TCD210042AA - CATALOG - WDocument2 paginiBJ - Cable Type - EN - TCD210042AA - CATALOG - WJORGE RODÎncă nu există evaluări
- Quick setup guide for D-Link ShareCenter DNS-320L cloud storageDocument5 paginiQuick setup guide for D-Link ShareCenter DNS-320L cloud storageMauricio GlezÎncă nu există evaluări
- Internal Shelter Units HTDDocument24 paginiInternal Shelter Units HTDLeonel TineoÎncă nu există evaluări
- TC4066BP, TC4066BF, TC4066BFN, TC4066BFT: TC4066B Quad Bilateral SwitchDocument11 paginiTC4066BP, TC4066BF, TC4066BFN, TC4066BFT: TC4066B Quad Bilateral SwitchCandelaria CortesÎncă nu există evaluări
- Assignments PSOCDocument4 paginiAssignments PSOCRajat Rai100% (2)
- 750T Installation InstructionsDocument192 pagini750T Installation InstructionsJuan DominguezÎncă nu există evaluări
- Notebook Spotlight: A Notebook of Desire That Features A Synthesis of Power and SophisticationDocument21 paginiNotebook Spotlight: A Notebook of Desire That Features A Synthesis of Power and Sophisticationxavier refourÎncă nu există evaluări
- XDVDocument54 paginiXDVnachiket1234Încă nu există evaluări
- File - 1CB30C A2c3fe F1a5aa 3804e1 5ecd44 024FD7Document4 paginiFile - 1CB30C A2c3fe F1a5aa 3804e1 5ecd44 024FD7Khaled KamelÎncă nu există evaluări
- HQDS Hybrid Power System Operator ManualDocument122 paginiHQDS Hybrid Power System Operator ManualTrung LêÎncă nu există evaluări
- Grounded AM MonopoleDocument29 paginiGrounded AM MonopoleAndres CaminoÎncă nu există evaluări