Documente Academic
Documente Profesional
Documente Cultură
Miller, Harold - Pat8487484 - Self Starting Magnetic Motor
Încărcat de
daveklodaveklo0 evaluări0% au considerat acest document util (0 voturi)
416 vizualizări34 paginiSelf Starting Magnetic Motor
Drepturi de autor
© © All Rights Reserved
Formate disponibile
PDF sau citiți online pe Scribd
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentSelf Starting Magnetic Motor
Drepturi de autor:
© All Rights Reserved
Formate disponibile
Descărcați ca PDF sau citiți online pe Scribd
0 evaluări0% au considerat acest document util (0 voturi)
416 vizualizări34 paginiMiller, Harold - Pat8487484 - Self Starting Magnetic Motor
Încărcat de
daveklodavekloSelf Starting Magnetic Motor
Drepturi de autor:
© All Rights Reserved
Formate disponibile
Descărcați ca PDF sau citiți online pe Scribd
Sunteți pe pagina 1din 34
‘US008487484B 1
«2 United States Patent (10) Patent No.: US 8,487,484 B1
Miller, Jr. et al (45) Date of Patent: Jul. 16, 2013
(51) PERMANENT MAGNET DRIVE APPARATUS $090 441978 Kelly
AND OPERATIONAL METHOD ‘4151431 A 4/1979 Johnson
Gleraet A Sib al
(95) vers: MaroldL. Mile, Je St. Augustine FL SHRED A | IDI Rey suo
(US), Andrew Es Colson, dry Watchung, Steten 4+ Most Antes aan
wits) S855 A" ito Mw ca
Saree A "DIR Rood
(73). Assignee: Torque Multipliers, LLC, Watchung (Continued
Nuts)
POREIGN PATENT DOCUMENTS,
(*) Notice: Subject to any disclaimer, the term of this CA. 2598229 AL 812006
Patent is extended or adjisted under 35. CN ioseaes AL Stoo
USC. 154(6) by 0 das (Continved)
(21) Appl. Now 13421,219 OrtiER PUBLICATIONS,
1 Hyp, “Anszing Magne Powered Motor” Since & Mecha,
(22) Filed: Mar 15,2012 asia aren
(51) Int. Cl Primary Examiner — Thanh Lam
WU2K 4002 (2006.01) ee ea
faa (04) storey, Agent, or Firm — Walter W. Daft
USPC nnn MOAZL 10/1215: 310115 (57) ‘ABSTRACT
(68) Feld of Cassication Search s
are Du0mi2 412.5, 13-15.108, 80 “caring and son penn age rae
‘See application file for complete search history. ‘ments. An intermediate magnet carrier disposed between the
ca on {ist and second magnet carriers caries thin? pemanent
S. PSTENT DOCUMENTS
A TU88S Kate tr
A 1929 Worthington
‘es A= 41987 Pocket 103
2OAII6 A+ 61960 Spoia 310103
BsaNbIs A Gi1967 Bakker eal
A Taser Mectare
fa70403 A 911969 Bey
Saste9 A 121060 Kune
yi9408 A ‘O9TT Sheridan
So3391 811972. Homeret al
Vokes & 111079 Taye
S106 A 'S1974 Kink
99.703 A+ 8197S. Kinnison aio
Dorid6 A * 61976 Howard 31080
Sorta? A+ S197? Seholin 3108
SoWiI0s A 41977 Davie
‘magnet arrangement, The magnet canes are armnged for
rotation relative to each other such thatthe magnet arrange-
rents produce magnetic interactions that result in poser
stroke forees causing the magnet carriers to undergo relative
reciprocation in first and second stroke directions daring
power zone portions of the relative rotation. The magnetic
Jleractions impart substantially no povver stoke Forces dur
ng dead one portions ofthe relative rotation. The dead zones
include magnet cartier lative rotation positions wherein
‘opposing magnetic poles are mutually coal aligned but
produce a substantially equal balance of push and pull mag-
‘elie frees, The apparatus may be synchronized so that the
dead zones coincide with top dead center and bottom dead
‘center relative reciprocation positions.
25 Claims, 18 Drawing Sheets
US 8,487,484 BI
Page 2
USS. PATENT DOCUMENTS 2on00071S61 AL Chiu eta
44s04503 A ot043 alee. 3ooso1siss7 AL Goovener
panne evisu Wea 2ovarsssie Al Kunde!
4.631455 A 12/1986 Taishot? oneonreee A Mitatovic
venta | iaieestomeel 20080122299 AL Cristo et
domast “61090 Viale 20100308601 AL 122010 Walden
Sinse930 A R981. Bisel ea
Shnsr724 A 101991 Paton ole BALES MaeNs)
SdivoM A “6.1903 Westlam ow Lsrst4 A 92002
SS7M9 A 101995 God cw rotsts9s4 A 11 2008
Sso2i0x6 A '11997 Pine DE SLI7877 AL 12/1982
Es042 A * 1097 Minato 31012 DE 19880314 AL 112000
Seeman A 41999 0 re 261764 AL“ L'1089
Sposoe A= 5.1999 sors FR dss760 AL 92005
o4@o43 B1e 12001 Sols GB 11992
6204989 BL 2001 Cehivame ce 41086
1352.80 B2_ 412003 Hay ea GB. A 6K
15700248 B2° 3.2004 Long 3108 GB S201
SUI BD 62004 Hashimoto ea » A Ai9o1
SSS0N682 Bi 10.2004, Thiruarayan ea 3p aoostseet 43003
a9.720 2 'S'2006 Danday kr toorss6r0 B19 2007
THSL332 B2 122006 Kunde KR 20080085485 8 9 2008
72ssoxs B2 “62007 Wise NI tor7oss C1 32006
7392:106 26008 Kunde RU 2177201 Cl 122001
740006 B2 72008 Kundel RU drooies C2 ‘62003,
T4640 B2 112008. Mitalovie Wo wos AL IL 1982
782.721 2 '1/2009 Kobayahi WO wo2006088232 42 ‘52006
20020014411 AL 4/3002 Mo WO WO200v088I4s AT 72009
dongorzisis AL 9.2002 Sullivan
2004183387 AI? 9.2008 Moe 310182 *eited by examiner
U.S. Patent Jul. 16,2013 Sheet 1 of 18 US 8,487,484 B1
U.S. Patent Jul. 16,2013 Sheet 2 of 18 US 8,487,484 B1
U.S. Patent Jul. 16,2013 Sheet 3 of 18 US 8,487,484 B1
FIG. 5
ap ve DEAD | TONE —
A
A SEg WS
es me
U.S. Patent Jul. 16,2013 Sheet 4 of 18 US 8,487,484 B1
AOTATION OTATION
WAG. CARRIER 4 MAG. CARRIER 12 WAG, CAFRIER 8 - MAG, CAPRIER 12
EAD ZONE
a
- am PecIAATION a
Ole) WI ®
OIC) ©O'@
FIG. 6A
U.S. Patent Tul. 16, 2013 Sheet 5 of 18 US 8,487,484 B1
ROTATION POTATION
NAG. CARRIER 4 - HAG. CARRIER 12 WAG, CARRIER 8 - MAG. CARRIER 12
PECIPROCATION
180"
EAD ZONE
180°
FIG. 6F
U.S. Patent Jul. 16,2013 Sheet 6 of 18 US 8,487,484 B1
U.S. Patent Tul. 16, 2013 Sheet 7 of 18 US 8,487,484 B1
100 100 106
108
10F 140A
U.S. Patent Jul. 16,2013 Sheet 8 of 18 US 8,487,484 B1
FIG. 108
om 120, ys 48
rn 414A
@ 48
14a 44a,
e a"
FIG. 10C
U.S. Patent Jul. 16,2013 Sheet 9 of 18 US 8,487,484 B1
FIG. 10D
US 8,487,484 BL
Sheet 10 of 18
Sul. 16, 2013
U.S, Patent
U.S, Patent
FIG.
9
FIG.
a
a
F.
3
Sul. 16, 2013
ee
es
» 430 4
Sheet 11 of 18
US 8,487,484 BL
U.S. Patent Jul. 16,2013 Sheet 12 of 18 US 8,487,484 B1
1 oo
2. a 8 ;
Fie. 1900S" 2S.
. eS es
Fig. 96 \-"
Qo -
U.S. Patent Jul. 16,2013 Sheet 13 of 18 US 8,487,484 B1
gh
~~ -€
FIs. 13 47 eo) a
1 @ Le
we ist
ee
U.S. Patent Jul. 16,2013 Sheet 14 of 18 US 8,487,484 B1
U.S. Patent Jul. 16,2013 Sheet 15 of 18 US 8,487,484 B1
FIG. 15
U.S. Patent Jul. 16,2013 Sheet 16 of 18 US 8,487,484 B1
US 8,487,484 BL
Sheet 17 of 18
Sul. 16, 2013
U.S, Patent
U.S. Patent Jul. 16,2013 Sheet 18 of 18 US 8,487,484 B1
FIG. 20
US 8,487,484 BI
1
PERMANENT MAGNET DRIVE APPARATUS
AND OPERATIONAL METHOD
BACKGROUND
|. Field ofthe Invention
‘The present invention relates to mechanical drives that
‘convert input forces or torques (applied at drive input) t0
‘output forces or torques (delivered ata deve output). More
particularly the invention concems reciprocating drive sys-
‘emis that perform force or torque conversion hy way of mag-
Acie field interctions betwoen permanent magnets
2, Description ofthe Prior Art
By way of background, there are numerous patents, pub=
lished patent applications and other literature proposing the
use of permanent magnets to actuate reciprocating drive
‘devices, such a motion couvertes, power tansmiters,
‘motors and other apparatus. In many cases, the proposed
‘devices refleet conceptions that have likely never been built,
tnd which would be unlikely to peetuce practical benefits i
they ever were constricted. This is not 10 say that such dis-
closures are inoperative. Indeed, many permanent magnet
drive systems have been constructed, and one need only con-
sul the popular You Tube website to sce various videos
“depicting such devies.
‘Yet no one, it seems, has upproached permanent magnet
«drive eonsteetion from the standpoint of an engine designer
having in mind basic principles of reciprocating engine
‘operation. An apparently unrocognized requirement is the
red to peridicilly relax the dive components in oder to
facilitate continuous reciprocating movement. AS fae as
known, this problem has not been addressed to date and my
be one reason why’ permanent magnet reciprocating drives
have largely remines the domain of hobbyists and linkers
SUMMARY,
the art is provided by a magnetic drive
apparatus having a novel magnet arrangement that s particu
Jarly suited for reciprocating operation, In an embodiment,
the magneticdrive apparatus includes rst and second magnet
‘carriers carrying first and second permanent magnet aratge=
mens, An intermediate magnet carrier is disposed between
the first and second magnet carriers, and caries third per-
‘manent magnel arrangement, The intemnediate magnet ca
rier and the fist and second magnet carriers are arranged for
rotation relative to each othe (relative tation). During such
relative rotation, the magnet arrangements produce magnetic
Jneractons that result in power stroke forces. The power
stroke forces cause the intemmediate magnet carrer and the
first and second magnet carriers to undergo reciprocation
relative to each other (relative reciprocation) in first and sec-
‘ond stroke directions during power zone portions of there
tive rotation, The magnetic interactions impart substantially
ro power stroke forces during dead zone portions of the
relative rotation. The dead zones encompass relative ota-
tional positions of the magnet cariers wherein opposing
‘magnetic poles ofthe fist, second and thied permanent mag
net arrangements are muttally coaxially aligned but produce
4 substantially equal balance of push and pull magnetic
Trees, The relative rotation and the relative reciprocation
between the intermediate magnet carrer and the frst and
second magnet cariers canbe synchronized so thatthe dead
‘ones oecir proximate to top dead center and bottom dead
‘center relative reciprocation positions ofthe magnet eatirs
(Gshich s where relaxation of power stoke forces s desired).
‘and so thatthe power stroke foreesoccur between thetop dead
0
o
2
‘eater and bottom dead center relative reciprocation posto
(hich is where maximum magnetie force i desire),
In an embodiment of the magnetic drive apparatus, tan
sition zone exist at cach transition between one of the dead
‘zones and one of the power zones, Fach transition zone rep-
resent transition period hetween the magn caries expe-
riencing substantially no power stroke forees and substan-
tilly maximom power stroke forces
nan emboxtiment ofthe magnetic drive apparatus, the ist
permanent magnet arrangement, the second permanent m-
‘et arrangement andthe third permanent magnet arrangement
cach comprise a set of magnets arranged ina magnet pattern.
‘The magnets are created on their spective magnet careers
{o presenta first magnetic pole ona frst magnet carrer side
and second magnetic pole on a second magnet eatie side
‘Hach magnet pattern may have an even numberof magnets
(On any given magnet carrer side, there may be an equal
number of Nand S poles aanged in at last a fist n-magnct
arooping having n adjacent magnetic poles ofa first polarity
fad atleast a second a-magaet grouping having n adjacent
‘magnetic poles ofa second polarity, with "n being an even
umber
Tnan embodiment ofthe magnetic drive apparatus, the first
‘magnet carrer has an interior side that faces a first side ofthe
{termediate magnet cartier o form a ftst magnetic interac-
‘ion zone, andthe second magnet carrier has an interior side
that faces a second side of the intermediate magnet carrer 10
orm a second magnetic interaetion zone, In this configura
sion, the power stoke forces wll he imparted when al oppo
‘ng magnet pols in the frst and second magnet inerac~
tion zones are eaaxally aligned in the power ane portions of
relative magnet carrer oation to either mutually repel oF
atiaet each oer. In particular, the power stoke forces will
produce relative reciprocation nafirst direction when oppos-
dng magictic poles in the fist magnetic interaction zone are
all coaxially ‘aligned to muwually repel each other while
‘opposing magnetic poles inthe second magnetic interaction
‘one are all coawialy aligned to mutually attract each other,
Conversely, the power stke forces will procice relative
reciprocation in second direction when opposing magnetic
poles in the first magnetic interaction zane are all coaxially
Aligned to rnually attract each other while opposing mage
relic poles in the second magnetic interaction zone are ll
coaxially aligned to mutually repel each other, The poser
‘ones may also exten for some rotational distance on ether
Side of the coaxial alignment positions
In an embodiment of the magnetic drive apparatus, each
dead 7one includes relative rotation postion of the magnet
carriers wherein one half ofthe opposing magnetic poles in
the fist and second magnetic interaction ones are coaxially
aligned to mutually repel ech other and the other half ofthe
‘opposing magnetic poles in the first and second magnetic
interaction zones are coaxially aligned to mutually ateaet
tach other. The dead zones may also extend for some rota-
tional distance on ether side of the coaxial alignment posi-
nan embodiment ofthe magnet drive apparatus, a main
shaft may extend through each of the magnet carriers. The
shaft may have a central longitudinal axis and may be
rolatable about, and capable of reiprocation along, the fon-
aitudinal axis, A fist end portion ofthe main shaft may be
Adapted for operative eoupling to an input component that
rotates the main shaft, second end portion ofthe main shaft
‘may be adapted for operative coupling to an output compo-
‘ent that is driven by reciprocation of the main shaft. The
US 8,487,484 BI
produces the relative rotation between the intermediate mag
net carrier and the first and second magnet eaeries. The main
shaft may be axially coupled to either the intermediate mag-
net carrer or the fist and second magnet carrer, such that
reciprocation of the main shaft along is longitidinal axis
produces the relative reciprocation between the intermediate
‘magnet carrier and he first and second magnet caries in the
fist and second stroke directions. For example, the interme-
diate magnet carrier may be fixed to 8 main shaft for both
reciprocation and rotation therewith, andl the fist and second
‘magnet carriers may not be operatively connected othe main
shaft tall,
TInan embodiment of the magnetic drive apparatus, the fist
and second magnet eatiers may be arrange for adjustable
Positioning toward and away from the intermediate magnet
‘carrier in onder to adjust the strength ofthe magnetic interae>
tions. The fist and sccond magnet carriers may be adjustably
Positioned toward and away from the intermediate magnet
‘carrier by a power-driven magnet carrer positioning system,
‘In another aspect of the disclosed subject matter, @ mag-
netic drive torque converter apparatusis provided by combin-
ing a magnetic drive appara as disclosed herein with an
‘input component and an output component. The input com-
ponent may be operatively coupled to either the intermediate
‘magnet carrier or the fist and second magnet carriers 10
produce the relative rotation between the intermediate mag-
ret carrer andl the fist and second magnet carters. The
‘ourpat component may be operatively coupled to either the
‘mermediate magnet carrier or the first and vecond magnet
cartiers such thatthe relative reciprocation between the inter-
mediate magnet carrer and the first and second magnet car-
riers in the fst and socond stroke directions actuates the
‘output component
Than embodiment of the magnetic driver lone converte
appara, the magnetic drive apparatus may include a min
shaft that extends through each of the magnet carriers. The
‘main shaft may be as previously deseribed, having a centeal
longitudinal axis and being rotatable about, and capable of
reciprocation along, the longitudinal axis. first end portion
‘ofthe main shaft is operatively coupled to the input compo-
‘nent, which rotates the main shaft.A second end portion ofthe
‘ain shall is operatively coupled to the output component
which is driven by reciprocation ofthe main shal. As men-
tioned above, the main shaft may be rtutaly coupled 10
‘ther the intermediate magnet carrier or the fist and second,
‘magnet carriers, such that rotation of the main shaft about ts
Jongitudinal axis produces the relative rotation between the
Jnermediate mognet carier and the fst and second magnet
‘carriers Likewise, the main shaft may be axially coupled to
‘either the intermediate magnet carrer or te fist and second
magnet carriers such that reciprocation of the main shaft
‘longi longitudinal axis produces the relative reciprocation
between the intermediate: magnet carrer and the frst and
second magnet carriers in the fst and second stoke diree-
In an embodiment ofthe magnetic drive torque converter
apparatus, a synchronization devices operatively coupled 10
‘ytchronize the min shaft with respect to its rotational and
reciprocation positions so that the dead zones coincide with
the main shalt being proximate to the op dead evater and
bottom dead center reciprocation positions, For example, the
main shaft may be synchronized so thatthe dead zones are
‘centerad onthe top dead center and bottom dead center reip-
rocation positions. Altematively, the main shaft may be syn
‘chronized so thatthe dead zones are dynamically adjusted in
positon or size
0
o
4
mbodimeat of the magnetic drive torque couverter
appar, the synchronization devicemay be provided by the
input component, the output component, and sensor/feed-
back system for controling the input component based on
positioning of the output component.
Tn an embodiment ofthe magnetic drive torque converter
apparatus, the input component may include a rotary drive
‘motor and the outpot component may inchide a crankshaft
‘connected tothe main shaft by a connecting od. In that case,
the sensor feedback system may include a sensor arranged to
sense rotation of the crankshail and a coateoller operable to
control the rlary drive motor in response to a crankshaft
positon signal fom the sensor.
Tn another aspect of the disclosed subject matter, a mag-
netic drive apparatus is embodied as a two-magnet carrier
Apparatus instead of a three-magnet carrier apparatus. The
‘wo-magnet carrier apparatus includes opposing ist and sec-
‘ond magnet carriers instead of the first, second and interme-
iste magnet carriers provided in the three-magnet carrier
‘appanitus. The Wo opposing magnet carriers respectively
carry opposing magnet eerangements tht are configured t0
produce magnetic interactions when the opposing magnet
‘arrers undergo relative mtation. The magnetic interactions
rade power stroke Forces that cause the opposing magnet
‘arrest undergo relative reciprocation in first and second
stroke directions during power zone portions ofthe relative
rotation. The magnetic interactions produce substantially no
power stroke forees during dead zone portions of the relative
rotation. The dead zones comprise relative rotational pos
‘ions ofthe magnet carriers wherein opposing magnetic poles
‘of the opposing magnet arrangements are mutually coaxially
aligned but produce a substantially equal balance of push and
pull magnetic forces. Te relative rotation and relative rcip-
rocation between the magnet carirs ae synchronizable so
that the dead zones occur proimate to top dead center and
bottom dead center relative reciprocation positions of the
‘magnet carers, and so thatthe power zones occur between
the top dead center and bottom dead center relative recipeo-
cation positions.
Tn another aspect of the disclosed subject mater, a set of
plu magnetic drive apparatus may be powered by one oF
‘more input components to drive a single output component.
“Each st of plural magnetic drive apparats may inclide two
‘or more three-magnet carrier drive apparatus, S60 OF More
‘wo-magnel carrer drive apparatus, or any desired combin-
‘ion of one or more three-magnet carrer apparatusand one or
more tWo-magnet carrier apparatus.
In another aspect of the disclosed subject matter, a mag:
netic drive method is provided. Inan example embodiment of
the method, opposing, magnet carriers are provided that
respectively carry opposing magnet arangements. Relative
rotation is induced between the opposing magnet carriees 10
produce magnetic interactions. The magnetic interations
pradce power stroke frees that cause the opposing magnet
carriers to undergo relative reciprocation in frst and second
Stoke dirseions during posser zone portions ofthe relative
‘lation. The magnetic inleractions produce substantially no
power stroke forees during deal zone portions of the relative
rotation. The dead zones encompass relative rotational posi-
‘ions ofthe magnet carriers wherein opposing magnetic poles
ofthe opposing magnet arrangements are mutually coaxially
‘aligned but produce a substantially equal balance push and
pull magnetic fore, The relative rotation and the relative
‘eiprocation ofthe magnet carriers may be synchronized to
achievea desired effect. For example the synchronizing may
Jnclde timing the relative rotation and relative reciprocation
of the magnet carriers so that the dead zones are centered on
US 8,487,484 BI
5
top dead center and bottom dead eater relative eciprocati
positions, and so that the power zones occur between the top
‘eu center and bottom dead center relative reciprocation
positions. Altematively, the syschronizing may include i
fing the relative ation and relative reciprocation of the mg-
net carirs so thatthe dead zones are dynamically adjusted in
Position or size.
In another aspeetof the disclosed subject matter, @ mag~
netic drive apparatus has opposing magnet carriers respec-
tively carrying opposing mapnet arrangements. The opposing
‘magnet arrangements have oppesing maaneti¢ poles and are
‘configured t produce magnetic interactions when the oppos-
ing magiet carriers undergo relative rotation. The magnetic
ineractions produce power stroke forces that eause the
‘opposing magnet carriers to undergo relative reciprocation in
fist and second stroke directions during power one portions
‘of the relative rotation. The relative rotation further includes
rotational dead zones wherein the opposing magnetic poles oF
the opposing magnet arrangements are mutually coaxially
aligned to define an equal numberof same: polarity and oppo-
site-polarty opposing poe pairs
BRIEF DESCRIPTION OF THE DRAWINGS.
The foregoing and other features and advantages will be
parent from the following more particular description of
‘exumple embodiments, as illustrated in the accompanying
Drawings, in which
FIG. 1 is a diagrammatic perspective view showing an
‘example throe-magnet carrier magnetic deve apparatus in 3
fist operational position:
TIG. 2 is diagrammatic perspective view showing the
magnetic drive apparatus of FIG. 1 in a seeond operational
position:
FIG, 3 is a diagrammatic perspective view showing the
magnetic drive apparatus of FIG. 1 in a third operational
position;
TIG. 4 is a diagrammatic perspective view showing the
magnetic drive apparatus of FIG. 1 in a fourth operational
position
FIG. 5s timing diagram showing an example timing of
the magnetic drive apparatus of FIG. 1
FIGS. 6A-6H are further timing diagrams showing an
‘example liming ofthe magnetic drive upparatus of FIG. 1
IG. Visa perspective view showing an example constr
tionof the magnetic drive apparatus of FIG. 1 in combination
‘with an input component and an output component o provide
‘a magnet drive torque converter apparatus:
FIG. 8 is a perspective view showing another example
‘construction of the magnetic drive apparatus of FG. 1 in
‘combination with an input component and an output compo-
rent to provide a magnetic drive orgue coms eter apparalts
TFIG. 9 is atop plan view showing the example magnetic
dive apparatas constriction of FIG. 8;
TIG. 10, js. ctoss-setional view taken along line 10A=
10A in FIG. 9
FIG. 108 js a cross-sectional view taken slong line 108
108 in FIG. 9%
FIG. 10 js a cross-sectional view taken slong line LOC
10C in FIG. 9
FIG. 10D is a cross-sectional view taken slong line 10D-
10D in FIG. 9;
FIG. 108,
108 in FIG. 9:
IG. 10P is crose-setional view taken along line 10F=
10F in FIG. 9)
1 cross-sectional view taken along line 10P-
0
o
6
FIG. 11 isa partial side view partial cross sectional view of
the example magneti drive apparatus construction of FIG. 8,
‘with the erss-section Being taken along line 1-11 in FIG. 9:
FIGS. 12A and 128 are enlarged perspective views show=
ing an output coupling component of the example magnetic
rive apparatus construction of FIG. 8;
FIGS, 134-131 are perspective views showing the first,
second and intermediate magnet earriersof the example mag-
elie drive apparatus construction of FIG. 8 with te sand
second magnetic carriers being fixed against rotation and
reciprocation, and the intermediate magnet carrier being.
shown in various rotational and reciprocation positions,
FIG. Iisa perspective view showing ameaiicationofthe
‘example magnetic drive apparatus construction of FIG, 8 ia
whieh the fist and second magnet caries are adjustably
positionable;
FIG. 18 isa diagrammatic perspective view showing an
‘example two-magnet carrier magnetic drive apparatus con-
struetion in a first operational position;
TFIG. 16 is a diggrammatic perspective view showing the
magnetic drive apparatus construction of FIG. 15 ina second
‘operational position;
FIG. 17 is a diggrammatie perspective view showing the
magnetic drive apparatus construction of FIG. 18 in a third
‘operational position;
IG, 18 i a diggrammatie perspective view showing the
‘magnetic drive apparatus construction of FIG. 18 in a fourth
‘operational position;
FIG. 19 i8 a perspective view showing an example mag
acti drive apparatus construction with multiple sets of mage
pet carriers driving a common output component; and
FIG. 20 is a perspective view showing another example
magnetic dive apparatus constrution with multiple ets of
‘malgnt caters driving « common output component.
DETAILED DESCRIPTION OF EXAMPLE
EMBODIMENT,
‘Turning now tothe drown figures, which are not nooes=
sarily to scale like reference numerals will bo used to repre-
sent like elements in all of the several views. As will be
escribed below in connection with varius alternative
‘embodiments, magnetic drive apparatus as disclosed herein
‘may be used fo conver a rotary input received from an input
power source to a reciprocating ouput that may be used
{rive a load. The rotary input may be continuous oF iatermit
tent, unidirectional of b-tiroctional. The reciprocating on
‘put may comprise a repeating eycle of reciprocal strokes. The
‘magnetic drive apparatus uses permanent magnet arrange-
‘ments that ae each cantigured ina selected magnet pater 9
‘reste magnetic interactions as the magnet amangements are
‘lated relative to each oherby the input power source These
‘mulgnetie interactions deliver reciprocating power ia each
reciprocal stroke direction (power strokes). Advantageously,
the magnetic interctions also produce well-defined dead
‘zanesot substantially no net magnetic foree that can be made
to occur proximate tothe end of each eciprocal srake, Dur
‘ng each dead zone, the net magnetic forces delivered by the
permanent magnet arrangements essentially “switeh off.”
This allows the powerstroke forees to momentarily eelax and
quiesee between power stokes, thus ensuring smooth con-
‘inuous rciprocating operation.
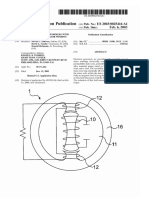
“Turning now to FIGS. 1-4, diagrammatic views of an
‘example three-magnetearier magnetic drive apparatus 2 are
shown in onder wo ilustrate general principles of operation of
the subject matter disclosed herein, Inthe illustrated cmbodi-
the Feft-hand end of the mawnetie drive apparatus 2 has
US 8,487,484 BI
1
fist magnet carier 4 canying a frst permanent magnet
arrangement 6 wih a set of permanent magnets 6A. The
right-hand end ofthe magnetic drive apparatus 2 hasasecond
‘magnet carrier 8 camrying a second permanent magnet
‘rangement 10 with a set of permanent magnets 10A. Aa
‘intermediate magnet caricr 12 is disposes between the fst
snd second magnet carriers and carries a third permanent
‘magnet arrangement 14 witha set of permanent magnets 14.
“The magnet carriers 4, 8 and 12 have respective fist and
second sides 4.V4B, 8A/8B and 12A/128 tht define a mage
net carrier thickness dimension, Although the magnet caeriers
4.8 and 12 are shown as being disk-shaped, other magnet
‘cartier configurations could also be used (e.,polygonal sta
shuped, ete) The magnet carriers 4, 8 and 12 may be fabri-
‘ted using any suitable metal or non-metal material of suk
ficient strength and rigidity 1o handle the magnetic forces,
including but not fimited to aluminum, titanium, stainless
steel, polymers, fiber-reinforced composites, ee. Inthe case
‘of metals, itis prefered that the material be substantially,
‘nonmagnetic (such as aluminum or titanium) or only mildly
magnetic (Such a stainless stee)- Materials that are more
‘magnetic (such as mild stel) may also be used provided it is
understood tha these materials may influence the magnetic
fiekls ofthe magnets 64, 108 and 14A.
The magnets 6A, 108 and 14. are illustrated as being disk
magnets that are axially magnetized 90 as t0 have @ north
‘magnetie polarity on one magnet face and a south magnetic
polarity onthe opposite magnet face. Fach magnet 68, 108
‘and 14 has. central longitudinal axis extending between its
north and south poles. This axis represents the principal mag-
nefc field axisof the magnets 6A, 104 and 14. Any suitable
Permanent magnet material may he wsed to fabricate the
‘magnets 6A, 10A and 14, Preferably, magnets with strong
magnetic field properties will be used, such as rare earth
magnets comprising. neodymium iron boron (NeFeB) or
samarium cobalt SmCo). Although less desirable duc to the
Tower magnetic field strength, ther types of magnets could
also be used, including alinica magnets comprising ali-
rinium, nickel and cobalt in addition to iron, ot ceramic
‘magnets comprising erite material, Different magnet shapes
may also be used. For example, instead of the magnets 6A,
10Aand 14 being disk-shaped, the magnets could bespheri
‘al, kidney sped, aana-shaped, et. Also, instead of exh,
‘ofthemagnets 6A, 10A and 144 heingasingle magnet some
‘oral ofthe magnets could be implemented asa coaxial stack.
‘of wo oF more magnets With their magnetic poles aligned for
nual atteveton,
‘The magnet carriers 4, 8 and 12 may carry their respective
magnets 6A, 10A and 4A in any suitable manner. For
‘example, each magnet carrier 4, 8 and 12 may formed with
mmagnet-carrying cutouts of suitable size and shape. If the
‘magnets are disk-shaped as shown in FIGS. 1-4, te magnet
cartier 4 may be formed with four circular cutouts 4C that
receive the four magnets 6A. Similaely, the magnet carrier 8
may be formed with four cieular cutouts 8C that receive the
‘our magnets 10A, and the magnet carrer 12 may be formed
‘with four eircular cutouts 12C that receive the four magnets
IMA, If desired, the thickness ofthe magnets 6A, 10A. and
|MAA from one magnet face to the other may be selected 10
match the thickness ofthe magnet caries 4, 8 and 12. Ate
natively, the magnets 6A, 10A and 14A could be thicker oF
thinner than the thickness dimension oftheir respective mag
net carriers 4,8 and 12. Any suitable magnet retention foch-
nique may be used to retain the magnets 68. 104 and 144 in
position. For example, the embodiment of FIGS, #-12B (e-
scribed in more detail below) showsan example technique for
0
8
securingthe magnets 6A, 104 and 14 on the magnet carriers
4.8 and 12 using magnet retainer plates.
‘The fist permanent magnet arrangement 6, the second
permanent magnet arrangement 10, and the third pemanent
‘magnet arrangement 14 are configured to produce changing
‘magnetic interctons when a rotary inp (not shown ia
FIGS. 1-4) imparts relative rotation between te intermediate
‘magnet eatier I and the fist and second magnet caries 4
and 8. In FIGS. 1-4, the relative rotation between the intet=
‘mediate magnet cartier 12 and the frst and second magnet
carriers 4and 8 is represented by arrows “A,"*B." and“C." In
FIG. , the intermediate magnet carrier 12 and the fist and
second! magnet carriers 4 and 8 are shosen in a fest relative
‘lational postion, InFIG. 2, the intemnediate magnet carrier
12and the first and second magnet carriers and & ate shown
in_a second relative rotational postion following 180° of
relative rotation between the intermediate magnet carrer 12
‘nd the first and second magnet carriers and 8. FIGS, 3 and
4 show relative rotational postions that are midway between
the relative rotational postions of FIGS. 1 and 2
"There are various ways thatthe magnetic drive apparatus 2
may be cansincted to facilitate relative ration between the
‘ntrmedinte magnet carer 12 and the fist and socond mag-
pel carriers 4 and 8, For example, the intermediate magnet
satrer 12 could be operatively coupled toan input component
‘and rotated by ise while he fist and second magnet careers
‘4and8 remain fixed against rotation. Conversoy, the firs and
sovondl magnet caries 4 and 8 could be operatively coupled
to an input component an rotated together while the inter
‘mediate magnet carrer 12 remains fixed against rotation. The
first and second magnet carriers 4 and 8 could either rotate in
the same direction or in opposite directions. further alter
ative wold be to rotate the intermediate magnet carrer in
‘one direction while rotating the first and second magnet car-
ers dand 8 inthe opposite direction. An example of the first
‘approach s described in more detail below in connection with
the constrictions shown in FIG. 7 and in FIGS. 8-128, In
these constructions, the intermediate magnet carrce 12 is
‘ounted toa main shaft that s fee to rotate independently oF
the first and second magnet carriers 4 and 8, The first and
second magnet eaniers 4 and are fixed against rotation by a
suppor frame assembly.
There are also various ways that the magnetic dive appa-
satus 2 may’ be constructed to feiitate relative reciprocation
between the intermediate magnet carrer 12 and the first and
second magnet carers 4and8. For example, te intermediate
‘magnet carrier 12 could be operatively coupled to an output
‘component to actuate reciprocation therein while he ist and
second mognet carrier 4 and 8 remsin fixed against recipro-
cation, Conversely, the first ancl second magnet eatriers 4 and
' could both be operatively couples toa output component
to actuate reciprocation therein while the intermediate iag-
fet carrier 12 remains xed aginst reciprocation. An
texample of the first approach is described in more detail
below in connection withthe constrvctions shown in FIG, 7
and in FIGS. 8128. In these constructions the intermediate
‘magnet carier 12 is mounted to a main shaft that i free 10
reciprocate independently of the first and second magnet
carriers dan 8, The first and second magnet carriers 4 and 8
sgainstreiprocation by a suppor frame assembly.
should be noted that any magnet carer that is adgpted io
reciprocate in oder o procice relative reciprocation between
the Intermediate magnet carier 12 and the fist and second
‘magnet carriers 4and 8 may also be adapted to rotate in order
to predice relative rotation herween the intermediate magnet
catrierandthe fist and second magnet carriers, Similarly any
‘magnet carrer that is fixed against reciprocation may also be
US 8,487,484 BI
9
‘xed apsinst rotation. For example, as described in more
detail below in connection with the constrctions shown in
FIG. 7 and in FIGS, 8-128, the intermediate magnet carrier
12 may be adapted to both rotate and reciprocate while the
first and second magnet carriers 4 and 8 remain fixed against
rotation and reciprocation, Canversely, the fist and second
‘magnet carers 4 and 8 could be adapted to both rotate and
reciprocate while the intermediate magnet carrer 12 remains
fixed agains rotation and reciprocation, As further alterna
tive, any magnet carrier that is adapted to reciprocate may be
fixed agains rotation, and visa versa, For example, the inte
iste magnet carrer 12 could beaded to reciprocate But
not rotate while the first and second magne earirs 4 and 8
‘are adapted to rotate but not reciprocate. Conversely the fist
and second magnet cariers 4 and & could be adapted to
Feciprocate but not rotate while the intermediate magnet car-
Flog 12 js adapted to rotate but not reciprocate.
In the embodiment of FIGS. 1-4, the number of magnets
6A, 10A and 144 in each respective permanent magnet
‘arrangement 6, 10 and 14 is four. Tae magnets 6, 108 and
14 are spaced equally from each other and are symmeti-
cally arraiged about the centers of their respective magnet
‘crtirs 4, 8 and 12 in four-sided polygonal pattem (corr
sponding tothe number of magnets) that is square and bal-
anced. Fach magnet pattern on any given magnet carter side
4AM4B, BABB oF 12A/I2B includes a first paie of adjacent
magnetic poles of a frst polarity (eg, N-polarity) and
second pair of adjacent magnetic poles of second polarity
(eg. S-polarity). Inthe square four magnet pater shown in
FIGS. 1-4, a fist two opposing sides ofeach magnet pattern
have magnetic poles ofthe fist polarity and a second two
‘opposing sides ofthe magnet pattern have magnetic poles of
the second polarity. Magnetic poles tat are diagonal from
‘each other in each square magnet pattem are of oppewite
polarity. As discussed in more detail below, magnet arange-
ments With more than four magnets may also be eoasiucte.
Tneach of FIGS. 1-4, thesecond side 4B ofthe first magnet
‘cartier 4 faces the fest side 12 of the intermestiate magnet
‘cartier 12 to form a first magnetic interaction zone ISA. The
first side 8A ofthe second magnet carrier 8 faces the second
side 123 of the intermediate magnet carrier 12 to form &
Second magnetic iteration zone ISB. With this magnet con-
figuration, the changing magnetic interactions produced by
‘magnet carrer relative rotation impart power steoke forces 0
the magnet carers 4,8 ad 12 tat produce the above-men-
tioned reciprocating output. In particular, power stroke forces
willbe imparted when al opposing magnetic polesineach of
the fist and second magnetic interaction zones 1SA and 158
‘are aligned to either mutually repel or attract each other.
The power stroke forces produce relative reciprocation
between the magnet caries 4, 8 and 12 in a frst direction
‘when opposing magnetic pole in the frst magnet inerae-
tion zone 184 all mutually repel each other while opposing
‘magnetic poles inthe second magnetic interaction zone 152
all mutualy attract each other. Conversely, the power stroke
orees produce relative reciprocation between the magnet
‘cartier 4, 8 and 12 in a second direction when opposing.
‘magnetic poles inthe first magnetic interaction zone 1SA all
‘mally strat each other while posing magnetic poles i
the second magnetic interaction zone 15B all mutually repel
‘each other
"The magnet carriers 4, 8and 12 may besaid tobe in “power
zone” portions of their relative roation when the magnetic
‘ineractions produce the sbove-described power stroke
ores. There is one power Zone for each power stroke diree-
tion, Power zane postions ofthe magnetie drive apparatis 2
‘are exemplified by FIGS, 1nd 2, FIG. 1ilstrates the mage
0
o
10
peti drive apparatus 2 atthe center ofa fist power zone
‘which the magnetic interactions produce power stroke forces
ina first direction, The intermediate magnet cxerer Zand the
first magnet carrier 4 are pushed apart dive to each magnetic
pole on side 12A of the intermediate magnet earier being
‘rutually coaxially aligned with an opposing magnetic pole ot
like polarity on side 41 of the frst magnet catie. This push-
ing force is represented by the arrows" 1" Ascan be sect, the
magnet caries 4 and 12 are rotatably positioned such that
there are twa N-N interactions and two S-S interactions in the
‘magnetic interaction zone 184, At the same time the inter
smdiale magnet carrier [Zand the second magnet carrie are
pled together due to each magnetic pole on side 12B ofthe
{termediate magnet carrer being mutually coaxially aljgned
with an opposing magnet pole of opposite polarity on side
BAT thesscond magnet carrier. This pl Torceis represented
by the arrows “E"" As can be seen, the magnet carers 8 and
12 are rotatably positioned such that there are to N-S inter-
actions and two S-N interaction inthe magnet interaction
one 150.
TFIG. 2 illustrates the magnetic drive apparatus 2 atthe
ceater ofa seeond power zone in which the magnetic inter
factions produce power stroke forces in second direction. As
‘noted above, this state follows 180° of relative rotation (Irom
the positon shown in FIG. 1) berween the intermediate mage
set carier 12nd the frst and second magnet caries 4nd 8
The intermediate magnet eartier 12 and the first magnet car-
rier 4 are pulled together due (0 eaeh magnetic pole on side
12\ othe intermediate magnet cari being mutually coax
ally aljgned with an opposing magnetic pole of opposite
polarity on side 42 of the ist magnet carrer. This pull force
ss represented by the rows “E.” As ean be seen the magnet
carriers 4 ani 12 are rotatably positioned such that there are
WON. Sinterations and two S-N interactions in the magnet
interaction zone 15A. At the same lime, the intermediate
‘magnet carrer 12 andthe second magne carrier Bare pushed
part due to each magnetie pole on side 12B ofthe interme-
ate magne carrier being mutually coaxially aligned with an
‘opposing magnctic pole of like polarity on side 8A of the
second magnet carrer. This pushing force is represented by
thearmows "1D." As can be seen, the magnet carts 8 and 12
are rotatably positioned such that there are two NN interac-
tions and (wo S-S inteictons in the magnetic interaction
one ISB.
should be noted thatthe power anes extend beyond the
‘coanial alignment positions ofthe magnetie poles shown in
FIGS. 1 and 2, such that each power zone has a rotational
range or “width” that spans @ portion of one revolution of
‘magnet carier relative rotation, Each paver zane will thus
start prior t0 the opposing magnetic poles of the magnet
arrangements 6,10 and Id being rated into mutual coaxial
alignment and ‘will end subsequent to the mutual coaxial
‘alignment postion, Power stroke forces will be generated at
any given relative rotation postion ofthe magnet carirs 4,8
‘nd 12 within each power zone
‘The magnet arrangements 6, 10 and 14 may be said tobe in
“dead zone” portions of their eatve rotation when there are
substantially no power stroke forces acting on the magnet
carriers 4, 8 and 12. ln the four-mapnet arrangements 6, 10
and 14 of FIGS. 1-4, there is one well-defined dead zone
‘entered between each well-leined power zone, and each
‘lative reciprocation eyele comprises two power zones sepa-
‘ated hy two dead anes. The dead zones exis when opposing
‘magnetic poles of the first magnet eatrier 4 the second mag-
‘net earier8 and the intermediate magnet carrier 12 are mut-
ally coaxially aligned but produce a substantially equal bal-
ance of push and pull mawnetie forces. Inthe dead zones, one
US 8,487,484 BI
ul
half ofthe opposing maynetie poles inthe fist and second
‘magnetic interaction nes 15A and ISB are aligned to mt-
ally repel each other and the ther half of the opposing mag
netic poles inthe frst and second magnetic interaction zones
are aligned! to mutually attract each other The dead zones are
‘effected when the relative rotation between the intermediate
‘magnet cartier 12 and the first and second magnet careers 4
tnd # is hall way hetween the tational positions that pro-
‘duce the power strokes within each power zone. The dead
‘zonesare centeredal the relative rotational postions showa ia
FIGS. 3nd 4.
‘The center ofthe dead zone shown in FIG. 3 corresponds to
90° of magne carer relative rotation from the power zone
rotational position of FIG. 1. The center of the dead zone
shown in FIG. 4 corresponds o 90" of magnet carer relative
rotation from the power zone rotational position of FIG. 2.
both of these dead zane positions, the opposing. magnetic
poles in each magnetic interaction zane ISA and 15H are
‘utally coaxially aligned, but their polarities are such a 0
‘reate net magnetic forces of substantially zero asa resul of
‘oo the opposing magnetic poles being ofthe same polarity
‘andthe ther two opposing magnetic poles being of opposite
polarity. In paricula, in each of FIGS. 3 and 4, the magnet
‘carriers 4,8 and 12 are rotatably positioned such that theres,
‘one N-N interaction, one S-S interaction, one N-S interaction
‘and one S-N interaction in each maunetic interaction mone
SA and ISB. Like the power zones he dead zones extend
beyond he coaxial alignment positions of the magnetic poles,
such that each dead zones aroational ranger "width that
Spans a portion of one revolution of relative magnotcarrice
rotation, Fach dead zone wil thus start prior tothe opposing
magnetic poles of the magnet arrangements 6, 10 and 14
being rotated into coaxial alignment, and willend subsequent
to the coaxial alignment postion.
Ina prototype implementation of the magnetie drive appa
ratus 2, which vas constacted in accordance with FIGS,
'$-128 (discussed in more detail below), the four magnets 6,
10A and 144 on cach respective magnet cartier 4, 8 and 12
‘vere implemented with 3 inch diameter, 1 inch thick, grade
N52 neodymium disk magnets from K & J Magnetics, Ine.
Each magnet 6A, 10A and 144 was axially magnetized and
‘way rated by the manufacturer as prodociag. maximum,
push/pull force of approximately 360 pounds, The magnets
6A, 104 and 14 were arranged on their respective magnet
‘caries 4, 8 and 12 so that the magnet centers were 2.75,
Inches fom the magnet cartier centers, The stoke length of
the magnet carrer relative reciprocation was 5.5 inches. At
the end of each stroke, the separation between the closest
Together magnet carriers resulted in a minimum spacing
between opposing magnets (poe face to pole fae) of 1.125
inches. At mistake, the separation between the magnet car-
riors was equal, and resulted 8 maximum spacing between
‘opposing magneis (pole face w pole face) of 3875 inches. La
tests conducted on this prototype, the power zones and the
‘dead zones each spanned approximately 90° of magnet car-
rier relative rotation at all relative reciprocation positions
Similar results would be expected for other magnetic drive
apparatus implementations wherein the magnet arrange-
ments each have four magnets arranged in a balanced square
‘magnet pattern.
‘The mative rotation and relative reciprocation between the
inermedite magnet carrier 12 and the ist and sseond mag-
net carriers and 8 can be synchronized so thatthe dead zones
and the power zones cectr at selected portions of magnet
‘carrier relative reciprocation. FIG. I shows a power zone that
‘scentered prowimate tothe midpoint ofa first poser token
4 fist direction. FIG, 2 shows another power 2one that is
0
o
12
centered proximate to the midpoint of a second power stoke
in the opposite direction, FIG. 3 shows a dead zone that is
centered between the end ofthe power stroke of FIG. 1 and
the beginning ofthe povver stroke of FIG, 2. This may be
referred to 88 the bottom dead center relative reciprocation
position ofthe magnet cariers 4, 8 and 12. FIG. 4 shows
Another dead zone that is centered between the end of the
Powerstroke of FIG, 2nd the beginning of the power stoke
OF FIG. 1. This may be refered to as the top dead center
‘lative tation position of the magnet carriers 4, 8 and 12
FIG, § shows a timing disk that represents another way 10
view the synchronization shown in FIGS. 1-4. In this illus
‘ration, both the magnet carrier relative rotation and the mag-
et catrer relative reciprocation are expressed in. angular
terms. The synchronization is such that for every degree of
relative magnet carrier rotation, there is one degree of relative
‘magnet cartier reciprocation. The dead zones ae centered at
the 0 top dead center and 180° bottom dead ceater relative
reciprocation pesitions, and the power zones are centered
‘beeen the dead zones, It willbe appreciated that expressing
the magnet carrier relative reciprocation in angular terms is
permissible becaise the relative reciprocation represents
periodic motion, Using an angular expression of the relative
‘eciprocation s more coavenien! Than Using the aetal magnet
carrer relative displacement because the later is implemien-
tation-spevfic. For example, ifthe relative reciprocation of
the magnet carriers 4, 8 and 12 represents simple harmonic
‘motion, the standard equation: d=A eos(0) gives the magnet
carrer relative displacement” In this equation, the angle
is the magnet carrer relative reciprocation in angular tems,
fnd the vie “A” is the maximum magnet carrer relative
isplacement from the midstroke position that occurs at 0-0?
fd (180°. Other equations gover different types of per-
‘dic motion. For example, ithe relative reciprocation ofthe
‘magnet carriers 4,8 and 12 behaves like a piston coupled to 3
‘crankshul via connecting rod (asit doesn the embodiment
of FIGS. 8-12B below), the magnet carrer relative displace-
‘ment willbe given bythe standard equation d-ecos(@) x=
sin(0))"*. In this equation, the angle isthe mognet carrer
relative reciprocation in angular terms, the value "a" i the
‘magnet cartier relative displacement with respect to the
crankshat axis," i the crank arm length, and "I" s the
‘onnecting od length,
As stated, FIG. § shows a synchronization scheme in
whieh, for every degree of relative magnet carer rotation,
there is one degree of relative magnet carrier reciprocation. At
the? positon marked “TDC,” the magnet carsies 4 8 and 12
Aare in the top dead center relative reciprocation positon and
‘are rotationally positioned atthe centerofa fist dead zone. At
approximately 45° of relative rotationiteciprocation of the
‘magnet carriers 4, 8 and 12, the end ofthe fist dead zone is
reacted and the magnet carriers transition inte a fist power
‘onc thal prxluces powwerstroke forces ina fs diretion, The
‘enter of this power zone is t approximately the 90° relative
‘ationeciprocation position. At approximately 135° of
‘lative rotation reiprocation of the magnet carriers 4, and
12, the end ofthe fst power zone is eacaed and the magnet
carriers transition ito 9 second dead zone. At the 180° posi-
‘don marked "BDC." the magnet cariers 4, 8and 12 areinthe
bottom dead center relative reciprocation position and are
rotationally positioned atthe center ofthe second dead zone
‘Mt approximately 225° of relative rotationireiprocation of
the magnet carriers 4, 8 and 12, the end of the second dead
‘ane is reached and the magnet carriers transition into a
second power zone that produces power stoke fores in a
‘evond direction, The center ofthis power zone isa peo
‘mately the 270° relative rotation/rciproeation position. At
US 8,487,484 BI
13
approximately 315° of relative rotation/eciprocation ofthe
‘magnet carriers 4 Band 12, the end ofthe second power zone
js reached! and the magnet carriers transition back to the frst
‘dead zone. The 0° TDC position is reached again after another
45° of relative otation/reciprocationof the magnet carriers 4,
Sand 1,
‘As noted above, the starting and ending positions of the
power zones and dead zanes are approximate. This s because
the transition from power zone to dead zone and from dead
zone to power zone does not occur instantaneously. Advan-
tageously, however, these transition zones (designate! as
“ip® ones in FIG. §)have been determined tobe quite shor.
and didnot exceed approximately 5° of relative rotation!
reciprocation in the above-deseribed prototype implementa-
tion ofthe magnetic drive apparatus 2, Each transition zone
represents a ransition period between the magnet carriers 4
‘8 and 12 experiencing substantially no pawer stoke forces
and substantially maximum power stoke forces. It should be
noted that characterizing the dead zones as prosiucing "sub-
stantially no power stroke forces” does not necessarily mean
there are exactly zero net frees within the dead rones. Flm=
‘ever, no dead ne forces have heen observed to exceed more
than several pounds, and were orders of magnitude less than
the power stroke forees in the prototype implementation of
the magnetic dive apparatus 2. Moreover, these very small
dead zone fores occur away from the dead zone centers, and
have no elféet on the reciprocal operation of the magnetic
“drive appara 2
‘As described below in connection withthe example con=
struction shown in FIGS, 8-12B, the synchronization shown
jn PIGS. 145 may be established and maintsined by a foed-
back system that monitor the relative reciprocation hetveea
the magnet caries 4, 8 and 12 and uses this information to
‘contol the relative rotation ofthe magnet carriers, Altea
tively. amechanical timing system couldbe provided wherein
the relative rotation and relative reciprocation between the
magnet carriers 4, 8 and 12 are synchronized using ®
‘mechanical coupling arrangement. I desired, the syncheoni-
zations may he adjusted x0 thatthe magnet catrier relative
rotation is advaneed oF retaled with respect o the magnet
cartier relative reciprocation, For example, the dead zone
relative rotation positions may be shifted so that the dead
zones are centered either before of after the TDC aad BDC
relative reciprocation positions, Asin an automotive engine,
the magnet carrer relative rotation could be dynamically
advanced and retarded 10 adjust the dead zone postions
‘acconting tothe speed of the magnet carier relative recipro-
‘ation, It would also be possible to dynamically advance and
retard the magnet cari relative rotation with respect to the
‘magnet carrer relative reciprocation at selected times during
‘each revolution of relative rotation, This will ave the effect
‘of adjusting the size ofthe dead zones relative othe power
‘ones For example, it is desired to decrease the deud zone
‘width while increasing the power zone width, the magnet
carrier relative rotation can be dynamically retarded (slowed,
‘down) within the power zones and dynamically advanced:
(spe up) within the dead zones. Similarly, i itis desired t0
‘increase the dead zone wid while deereasing the power one
‘Width, the magnet earier relative ation eaa be dynaaieslly
advanced (sped up) within the power zones and dynamically
retarded (slowed down) within the dead zones
TFIGS. 6-6H presents additional viewsof the relative rota
tion/reiprocation cycle of the magnet cartier 4, 8 and 12
using the synchronization scheme shown in FIGS. 1-8, Pach
DOfFIGS. 6-611 shows 2 45° incrementaton of the relative
rotational and reciprocation positions of the magnet carriers
4.8 and 12. The center portion of each figure shows the
0
o
14
wet cartier eative reciprocation position (in angular
terms). The left hand portion of each figure depicts the rela-
tive rotational postions ofthe first magnet carrier 4 and the
‘ntemdiate magnet cari 12. The alignment of the oppos-
‘ng magnets inthe first magnetic interaction zone 184 (see
FIGS. 1-4) isalso shown, as are the polarities of each pairof
‘opposing magnets (ie, the polatites ofthe magnets I8A 00
the first side 12. ofthe intermediate magnet cartier 12 and
the polarities ofthe magnets 6 on the second side 43 ofthe
first magnet carrer 4), The right hand portion of each figure
depicts the relative rotational positions of the second magnet
‘atrer 8 and the intermediate magnet carer 12. The align-
‘ment ofthe opposing magnets in the second magnetic inter
action zone 189 (see FIGS. 1-4) is also shown, as are the
polarities ofeach pair of opposing magnets {ithe polarities
ofthe magnets 144 on the second side 2B ofthe intermedi-
ate magnet carer 12nd the polarities of the magnets 10A 00
the frst side 84 ofthe scond magnet carrier 8)
‘As an interpretive guide, the leli-hand portion of FIGS.
6A-611 sa view looking from the second side 4B ofthe fst
‘magnet carrier toward the fist side 724 ofthe intermediate
‘magnet carrier 12. The right-hand portion of FIGS. 68-6H is
‘view looking from the cond side 129 of the intermediate
‘magnet carrier 12 toward the first side 8A of the second
‘magneteatier8. Inthe positions where the opposing magnets
‘overlap (i.e. FIGS, 6A, 6C, 6E and 6G), the letter (Sor N) at
the center of each depiced magnet pair is the polarity ofthe
‘magnet 14 on the intermediate magnet carrer 12, and the
offset letter (SorN)isthe polarity o its opposing magnet 6A
‘or 10 on the first of second magnet carrer 4 or 8, In the
positions where the opposing magnets do not cxerlap (he
FIGS. 6B, 6D, 6F and 61), the magnets 144 ofthe interme-
‘magne carrier [2 aredepictedas being ahove theoppos-
magnets 68 oF 10A of the first or second magnet eariers
or & In similar vein, when the polaris of opposing
‘magnet pairs are discussed below, theirs platy willbe hat
‘ofa magnet 14 of the intermediate magnet carrer IZand the
second polarity will be tha ofa magnet 6A of the fst magnet
carrier 4 oF a magnet HDA of the sccond magnet carrier 8
(depending on whether the first or second magnetic intore-
tion zone ISA or 153 is being discussed). When magnet pair
polarities are enumerated below, they will start in the upper
eft quadrant of each magnet arrangement and coatine ia
clockwise onder
TFIG. 6A depicts the magnet carriers 4, 8 and 12 in a O°
relative rotation eeiprocation position, In this postion, the
‘magnetic interactions in the first magnetic interaction rone
ISA areS-N, 8-8, N-Sand N-N, Themagnetic interactions in
the second magnetic interaction zone 18B are N-N, N-S,S-S
and SN. Ineach magnetic interetion zone 158 and 158, al
‘ofthe opposing magnet pairs are coaxially aligned for mutual
tration and the other half are coaxially aligned for mutual
‘ppilsion, Thus, FIG. 6A depicts a dead zone that is centered
atthe 0° TDC relative reciprocation position ofthe magnet
carriers 4, Band 12. scan Be seen, his dead zone is appeoxi-
mately 90° wide
FIG. 6B depicts the magnet carers 4, 8 and 12 in a 45°
relative rotationeeiprocation position, In this postion, the
relative rotation ofthe magnet carriers 4 8 and 12s half way
‘between the midpoints of dead zone and power zone rot
‘ional positions, The magnet carers 4, 8 and 12 are thus ina
transition zone wherein the magnetic forces are changing
{rom the substantially net ze condition of dead zone tothe
full magnetic force cndition of « power zone.
FIG. 6C depicts the magnet eariers 4, 8 and 12 in a 90°
‘relative rotation'eciprocation position, In this postion, the
US 8,487,484 BI
15,
ISA ore N-N, SS, S-S and N-N. All ofthe opposing magnet
pars in this magnetic interaction roa are coaxially aligned
‘with lke polarities so thatthe frst magnet cai 4 and the
intermediate magnet carrer 12 repel each other with maxi-
‘mum push foree. The magnetic interactions inthe second
‘magnetic interaction zone 159 are S-N, N-S, N-S and S-N.
Alof the opposing magnet pairs in this magnetic interaction
‘zoneare coaxially aligned with opposite polarities so that the
Second magnet carrier 8 and the intermediate magnet caret
12 attract each other with maximum pull force. FIG. 6C
therefore depts a frst power zone that i entered at the 90°
relative reciprocation position of the magnet carriers 4, 8 and
12, As can be seen, this power zone is approximately 90°
wide,
IG, 6D depiets the magnet carers 4, 8nd 12 in.a 135°
relative rotationrecprocaion position. in tis postion, the
relative rotation of the magnet carriers 4 8nd 12 is half way
between the midpoints of deed zone and power zone rots
tional positions. The magnet carriers 4, 8 ad 12 are thus in &
transition zone wherein the magnetic forces are changing
from the full magnetie fore condition ofa power zane to the
substantially net zero condition ofa dead zone
TG. 6E depicts the magnet carirs 4, 8 and 12 in 9 180°
relative rotation/reciprocation position. in this postion, the
‘magnetic interactions inthe fist magnetic interaction zone
A8Aare N.N, NS, S-S and S-N, The magnetic interactions
the second magnetic interaction zone 188 are S-N, S-S, N-S
and N-N, In each magnetic interaction zone 184 and 18B,
half of the opposing magnet pairs are coaxially aligned for
mal attsetion and the other half are coaxially aligned for
‘mutual repulsion. Thus, FIG. 6E depicts a dead zone that is
‘centered atthe 180° BDC relative reciprocation position of
the magnet caries 4, 8and 12. Asean he scen, this dead zone
is approximately 90° wide,
FIG. 6F depicts tbe magoet carriers 4, 8 und 12 in a 225°
relative rotation/reeiprocation position. In this position, the
relative rotation ofthe magnet carrer 4, Sand 12s half way
berwoen the midpoints of dead zone and power zone rota
tional positions. The magi carriers 4, 8and 12 are thus in @
transition zone wherein the magnetic forces are changing
fom the substantially net zea condition of a dead zane tothe
{ull magnet force condition ofa power zone.
FIG. 6G depicts the magnet carriers 4, 8 and 12 in a 270°
relative rotation/reeiprocaion position. In this position, the
‘magnetic interaction in the first magnetic interaction zone
ISA are S-N, NS, NS and S-N. Allof the opposing magnet
pairs in this magnetic interaction zone are coaxially aligned
‘with opposite polarities so that he first magnet ear 4 and
the intermediate magnet carier 12 atoet each other with
‘maximum pull force. The magnetic interactions in the second
‘magnetic interaction zone 152 are N-N, $-S, SS and N-N.
Allof the opposing magnet pairs in this magnetic interaction
‘one are coaxially aligned with like polarities so that the
Second magnet cater 8 and the intermediate magnet carrie
12 ropel each other with maximum push foree. FIG. 6G
threfore depicts « power zone that is centered at the 270°
relative reciprocation position ofthe magnet carriers 4, 8and
12. As can be seen, this power zone is approximately 90°
wide,
FIG. 6H depts the magnet carriers 4, 8nd 12 in.a 315°
relative rotation/reeiprocation position. tn tis position, the
relative rotation ofthe magnet carrer 4, Sand 12s half way
betwoen the midpoints of dead zone and power zone rot
tional positions. The magnet carriers 4, and 12 are thus in @
transition zone whervin the magnetic forces are changing
fom the full magnetie force condition ofa power zone to the
substantially net zero condition ofa dead zone
0
o
16
Turning now to FIG. 7, the maunetie dive apparatus 2 is
showa in an example constriction 2A wherein the interme:
iate magnet eatier 12 i adapted for rotation and reciproea-
tion while the fist and second magnet carriers 4 and 6 are
adapted to remain fixed against rotation and reciprocation, In
the magnetic drive apparatus constriction 2A, amain shalt 16
isarngedo extend hoop cental bows 4D, BD ad 12D
are respectively formes inthe magnet carriers 4, Nand 12
‘The mains 16 substactily sig and bes a central
longitudinal axis 18 that is substantially parallel tothe longi-
‘dina axes and magnetic field axes) of hemagnets6A, 108
and 14,
‘The main shalt 16 is arranged for simultaneous rotation
‘and reciprocation. A first end portion 20 ofthe main shaft 16
is adapted for operative coupling to an input component 21,
shown diagrammatically in FIG. 7, tht eotatably drives the
‘main shat. For example, as deseribed in more deal below in
connection with FIGS. 8-12B, the input component 21 may
be provided by a rotary drive motor. second end portion 22
of the shaft 16 is adapted for operative coupling to an output
‘comportent that is driven by reeiprocation ofthe main shaft
18, In FIG. 7.an example rotary output component 23, which
:may be implemented as a crankshaft, i shown diagram:
cally. Altematively, a reciprocating output component, such
as 8 pneumatic or hydraulic piston, could be arranged to be
riven by reciprocation ofthe main shaft 18. The ation of
the input and output components 21 and 23 to the magnetic
drive apparatus construction 2A forms @ magnetic drive
forgue converter apparatus that eonvers an inptt tongue
applied by the input component to an output torque delivered
bythe opt component 23
The main shaft 16 s rotatably couple tothe central open-
ing 12D of the intermediate magnet carrer 12, but is free to
sate within the central openings 4D and 8D of the first and
sovond magnet carriers 4 and 8, The rotatably coupled inter
‘mediate magnet carrier 12 rotates with the asin shaft 16 but
the non-roatably coupled fist andl second magnet caries 4
and 8 will not rotate, and will preferably be fixed against
‘tation. In this way, rotation of the main shaft 16 abot its
longitudinal axis 18 by the input component 21 will produce
relative rotation between the intermediate magnet carrer 12
and the fist and second magnet cariers 4 and 8, The main
shaft 16is also axially coupled to the central opening 12D of
the intermediate magnet carrier 12, but i fee to reciprocate
‘rough the centr openings 41) and 8D of the lst and
second magnet earirs 4 and 8, The axially coupled interme-
iate magnet carier 12 reiprocates with the main shaft 16
but the non~axally coupled first and second magnet carriers 4
‘nd 8 will pot reciprocate, and will preferably be fxed against
reprocation, In this way, reciprocation ofthe main shaft 16
‘long its longitudinal exis 18 will produce relative reciproca-
‘ion between the intermediate magnet carrier 12 and the first
‘and sevond magnet caries 4 and in fst and second stroke
tirections.
‘Turning now to FIGS. 8-128, the magnetic drive apparatus
2s shown ina further example constriction 29 that ses the
‘otating/eciprocating main shaft arangement described in
connection with he example constriction 2A oF FIG. 7.Asin
the case of FIG, 7, FIGS, 8128 depict @ magnctic deve
torque converter apparatus because the magnotic drive appa-
rus construction 2B is operatively coupled to input and
‘output components, namely, an input motor 36 anda crank-
shaft assembly-40 (both of which ae desribed in more detail
blow). Inthe magnetic drive apparatus construction 2B, the
intermediate mage carier 12 i again rotatably and axially
coupled tothe main shaft 16 while the first and second magnct
carriers 4 and 8 are not coupled tothe main shaft in any way.
US 8,487,484 BI
17
As shown in FIGS, 10410€; the frst and second magnet
‘carrier 4 and 8 ae of larger diameter than the interenedate
‘magnet carer 12. This allows the mune carries 4 and 8 to
be conveniently secured oa sport frm assembly 24 (see
FIG. 8) that bold and positions the fis and second magnet
‘carrier at desied spacing. The spp frame ossembly 24
sho cates the main shat 16
The suppor me assembly 24 is constucted witha set of
four longstndinal spool assemblies 26 that interconnect the
fist and sccond magnet carr 4 and 8, bat atthe intrmc-
ate magnet earier 12, The spool assemblies 26 also mount
‘esc of slblizing plates 28,30 and 32 thot are oriented
substantially poral othe magnet cater and. As shown
Jn FIGS. 10A and 10C-10E, cach spool assembly 26 may
include an elongated rod 264 that extends through come=
Sponding pertre ormedin the magnet carrer and and
inthe stabilizing plates 28,30 nd 32 Each soo) assembly 26
may also include act of spacers 262 tht mount on the
longated roe 26A between each pair ofajacent magnet
‘urier andlor stabilizing plates in order to properly space
theve components. Asean beseen inF1GS. Sand. cachspool
assembly 26s showin to have four spacers 260, one between
the stabilizing pate 28 and the fist magnet carer 4, the
second between the frst magnet carir 4 andthe seeond
magnet canier8, the third between the second magnet catiee
8 aod the stabilizing plate 3, and the fourth becveen the
stabilizing pate 30 aod the stabilizing pate 32. The ends of
the elongated rods 26A are threaded 10 receive reining
members 26C that seca the suppor frame 24 together. It
will be apprecited that other arrangements for spacing the
“avions mgnet carriers and stabilizing pistes may also be
used, suchas separate sping ods connected between each
Pairof spaced components
“Ashes show it FG, 1, the stabilizing plate 28 ote
adjacent othe first magne carr dads used oppor the
rain shaft 16 proximate oi fist end portion 20 Ia parca
lar, stabilizing plte 28 cariesan int coupling assembly 34
‘none side of central opening 284 that secommodates the
‘ain shat 16, The inp coupling sembly 34 i intomally
‘configured to suppor the main shat 16 fo lo ection rcip-
Focating motion while imparting rotational forces thers,
The motor 36 s operatively connected othe input eouping
assembly 34 serve as a ory input component that rotates
the main shaft 16 during operation of the magnetic dive
‘pparats 2. The stbiling pte 30s located acca tothe
sceond magnet eaerier 8 and s used to support the min shat
16 proximate to its second end portion 22. In particular
stabilizing plate 30 asa cent opening 308 that mounts 3
ball hearing ossemhly 38 to rtoBy support the main shat
16. The stabilizing plate 32s located adjacent to stabilizing
plate 30, I asa large conta opening 32A that accommo-
{ates the main shat 16, a6 well as components ofthe erank-
shafl assembly 40, whichis mounted the ouside of sbi
Firing plte 32. The crankshaft assembly 40 serves as rotary
‘tp component tha driven by reiprocaton of tie main
shaft 16 dering operation ofthe magnetic drive opparats
constriction 20,
"As best shown in FIGS. 8, 9 and 11, each ofthe magnet
cers 4, 8 and 12 includes a respective pac of magnet
retainer lates 42, 44and 46 inorder to secure thee respective
magnets 64, 10X and 144 in positon, The magnet retainer
plates 42,44 and 46 may be formed from any motrial tt
‘oes nt adversely let the magnetic intrations botseen
the magnets 6A, 108 and T4A. They muy be respectively
secured to the magnet carries 4, 8 and 12 using ay suitable
tmounling technique, such as with countersunk machine
Serons 48,38 shown ia FIGS. 108, 108 ad 10C
0
o
18
As can be soon in FIG, H, the central bore 12D of the
intermediate magnet carrier 12 is fixed om the main shaft 16
{orrotaton and reciprocation therewith, for example, using &
eyed shaft coupling arrangement (not shown). As. also
shown in FIG. 1, the cental bores 4D and 8D of the first and
second magnet carriers and are spaced from the main shaft
16 so that the main shaft i free to rotate and reciprocate
relative tothe fist and second magnet carers.
‘Ascan be seen in FIGS. 8, 9 and 11, the suppor plates 28
‘and 32 may include mouating members $0 for securing the
support frame 24 ta suppor surface (not shown). The input
‘motor 36 may likewise include mounting members 82 for
securing the motor a support surface (not shown), The input
‘motor 36 may be operatively connected tthe input coupling
assembly 34 in any suitable manner, such a8 by using &
TTanged coupling connection S4, Theinputcoupling assembly
‘3 inchudes a base housing 6 that may be bolted or otherwise
fixedly attached t0 the outside of the support plate 28. As
shown in FIG. 11, the input coupling assembly 34 further
includes aball-spline unit 8 whose outside diameer is otat-
ably connected to the base housing $6 via a ball bearing
‘assembly 60, The inside diameter of the ballsplne unit 8
‘includes plural longitudinal rs of ball hearing clements 62
arranged to engage corresponding longitudinal splines 64 that
‘ay be formed proximate tothe fist end portion 20 of the
‘ain shaft 16, The ball bearing elements 62 impart rotational
{ores to the main shaft 16 while allowing the shaft 0 reeip-
rocate back and forth with minimal fietion. A langed cover
tube 66 mountsto the end face the ball-spline assembly 88,
‘and is used to carey one side ofthe flanged coupling connec:
tion 84. The other side of the Hanged coupling connection
attaches tothe output shaft of the motor 36. The cover tube 66
fs long enough to socommodate the reciprocating movement
ofthe frst end portion 20 ofthe main shaft 16 there
‘With continuing reference to FIGS. 8,9 and 11, dhe crank
shaft assembly 40 may beconfigured witha pairof crankshaft
support plates 68 that are carried bythe stabilizing plate 32
‘The crankshaft support plates 68 are provided with main
‘bearings (not shewn) tat rotatably cary #ranksbeft 70. The
crankshalt 70 ineludes a pair of counter weighterank arm
‘members 72. As shown ia FIG. 9, a central portion of exch
counter weightierank arm member 72 has an outwardly
extending main journal 73 that is solatably mounted to the
‘main bearing of one ofthe crankshaltsuppec plates 68. As
additionally show in FIG, 9, and also in FIG. 11, the rank
‘am end of each counter weighterank arm member 72 sup-
ports one end ofa connecting rod journal 74. The connecting
‘journal 74s attached to oneenid of aconneeting rod 76 via
a suitable bearing arangement
The othe endothe connecting rod 76s rotatably attached
toa main shall coupling assembly 78 via aclevis connection.
As additionally shown in FIGS. 124 and 12B, the coupling
‘assembly 78 is rotatably mounted to the second end portion
2Zof the main shaft 16 50 thatthe main shafts free to rotate
‘lative othe coupling assembly. The coupling assembly 78
‘ay be configured with a tubular housing 80 into which is
inserted a suitable bearing 82 (eg. flanged olite bearing)
that receives the second end portion 22 of the main shaft 16.
A bolt 84 (see FIG. 11) that threads onto reduced diameter
posta the main shaft second end portion 22 may be used t0
‘ean the coupling assembly 78 on the main shal 16 during
reciprocation thereof. The coupling assembly 78 includes a
levis 86 thats pinned tothe connecting od 76 with bushed
clevisholtarrangement 88. Ir will bescon from FIGS. 11,124
‘nd 2B thatthe coupling assembly 78 willallow free rotation
fof the main shaft 16 at its second end portion 22 due to the
Dearing 82. Atte same time, the coupling assembly 78 will
US 8,487,484 BI
19
transmit the reciprocal motion ofthe main sbat 16 in its fst
and secon stroke directions through the connecting rod 76.0
the crankshaft 70, thereby causing the erankshal to rotate. As
‘can be seen in FIG. 9, an output end 82 of the erankshail 70,
may be connected Wo a desired output lod (aot shown).
‘As previously noted, ina prototype implementation ofthe
magnetic drive torque converter apparatus shown in FIGS.
‘8-128, the four magnets 6A, 10A and 14Acon each respective
magnet caeier 4, 8 and 12 weee implemented with 3 inch
‘diameter, | inch thick, prade NS2 neodymium disk magnets
from K & J Magneties, Ine, Bach magnet 64, 10A and 148
was axially magnetized and was rated by the manufacturer as
producing # maximuin poshpull force of approximately 360
pounds. The magnets 6A, 104 and 14A were arranged on
their respective magnet carriers 4, #and 12 so thatthe magnet
‘enters were 2.75 inches from the magnet arcier centers. The
stroke length ofthe magnet carrier lative reciprocation was
5.5 inches, The crank arm length provided by the erank am
Portion of counter weighterank arm members 72 was 2.75
Jnches, The length of the connecting rod 76 was 10 inches.
The mapnet cariers 4, 8 and 12 were | inch thick and the
‘magnet retainers 42,44 and 46 were 0.25 inches thick. At he
‘end of each stroke, the separation gap between the closest
together set of opposing magnet retainers (ie., 42/44 or
46/44) was 0.625 inches, such that the minimum spacing
between opposing magnets (pole face to pole face) was
(06625+(2x0.25)=1.125 inches, At midstroke, the separation
‘zap between each set of opposing magnet retainers (i.
442/44 and 46/44) was 3.375 inches, ch thatthe maximum
spacing between opposing magnets (pole face to poe face)
Was 3.3754(2x0.28)-3.875 inches,
“The magnetic drive torque converter apparatus shown in
EIGS, 8-121 may be synchronized in say stable manner so
that rotation of the main shalt 16 is timed with respect to
rotation ofthe ranks 70 (as diven by reciprocation ofthe
‘main shaft). As shown in FIGS. 8 and 9, an example synehro-
nization device 90 may inelude a sensor 92 that monitors
crankshaft postion (eg, a rotary encoder), and a signal
‘carrying feedback circuit 94 that provides a crankshaft pos
tion signal to a programmable servo controller 96 (eg.
implemented as a programmable digital device) that eonteols
the input motor 36 (via a control circuit 97) according to the
position signal. Any of various existing robotic servo contol-
Jer systems may be used for this purpose. Other types of
synchronization device could also be used to synchronize
‘operation of the illustrated magnet drive torque converte
apparatus, ineluding but not limited to, a mechanical timing
system that mechanically couples the input drive motor's
rotary input to te crankshaft’ rotary output
The concept of synchronizing a magnetic drive apparatus
as disclosed herein was discussed above. In the magnetic
drive ore converter apparatus of FIGS, 8-128, the servo
‘controller 96 is programmed to control the main shafts rota
tional positon based on the angular position of the crankshaft
70, which corresponds viaa definable mathematical lation-
ship to the main shaf’s reciprocation position (se discussion
‘of FIG. 5 above). As previously’ noted, the magnetic dead,
zones can be made to coincide with the min shaft 16 being
proximate to its top dead center and bottom desd center
reciprocation positions, and s that the msgnetc power zones
‘occur between these positions. As also noted the servo con-
tole 96 could also be programmed to synchronize rotation
‘of the main shaft 16 so that the dead zones are dynamically
advanced or retarded with respeet tothe top dead center and
bottom desd center recipmcation postions, oF to vary the
positon or size ofthe dead zones.
0
o
20
FIGS, 134.131 ilusteate the rotational and reciprocation
positions of the intermediate magnet carrier 12 with respect to
the first and second magnet caries 4 and 8 during two reeip-
‘meal strokes of the illustrated magnetic drive torgue com-
verter apparatus. In these figures, the main shaft 16 is syn-
chronized by the servo controller 96 so thatthe two dead
‘anes are centered at the 0° and 180” reipeocation positions
‘ofthe main sha, and so that the power ones are center at
the 90° and 270° reciprocation positions. FIGS. 13A-13H
thus correspond to the timing arrangement show in FIGS.
‘6-61, respectively, Bach dead zone and each power zone is
approximately 90° wide
FIG. 134 shows the intemnedite magnet eanier 12 atthe
0°TDC reciprocation postion and inthe middle ofa frst dead
‘zone. FIG. 138 shows the 43° reciprocation position of the
intermediate magnet carrier 12 wherein the intermediate
‘magnet cartier is transitioning out of the frst dead zone and
ino. is power zone. FIG. 13C shows the 90° reciprocation
positon ofthe intermediste magnet 12 wherein the interme-
‘ate magnet carrer is in the middle of the fist power Zone,
FIG. 13D shows the 135° reciprocation postion ofthe inter
diate magnet carrer 12 wherein the intermediate magnet
care is transitioning out athe fist power zone a into a
second dead zone. PIG, 13E shows the 180° BDC reciproea-
‘ion position of the intermediate magnet carrier 12 wherein
the intermediate magnet carrier isin the mide ofthe second
‘dead zone. FIG. 13F shows the 225° reciprocation postion of
the intermediate magnet cxtier 12 wherein the intermediate
‘magnet carier is transitioning out of the second dead zone
and into @ second power zone. FIG. 13G shows the 270°
‘cipineation postion ofthe intermestate magnet 12 wherein
the intermediate magnet carriers in the middle ofthe second
power mn FIG. 1311 shows the 315° reeprocation position
‘ofthe intermediate magaet carier 12 wherein he intermedi-
fate magnet carrier is transitioning out ofthe second power
‘one ann eatuming tothe frst dead zone.
FIG. 14 illustrates further magnetic drive apparatus con-
struetion 2C wherein. magnet carrier spacing. adjustment
‘capability isprovided. This constroction is substantially simi-
Jarto the constuction 2B of FIGS. 812B, except tha the frst
and second magnet carers 4 and 8 are dynamically adjust
ably positionable during operation in onder to change their
spacing relative to the intermediate magoet carrier 12, and
thereby adjust the strength ofthe magnetic interactions. To
achieve this effet, the spool assemblies 26 can be modified
by removing the spacing members 268 on each side of the
fist and second magnet cariers 4 and 8 t expose the
‘threaded rods 26. The first and second magnet carriers and
'8 may then be modified so that they threadably receive the
threaded rods 26A. Rotation of the threaded rods 264 will
thus r-position the fist and second magnet cartier 4 and 8
toward and away fom the intermediate magnet cartier 12
(depending on the diection of rod ration), Irneeded, ai-
sional spacing members (not shown) may be added to main-
tain the positions of the stabilizing plates 28, 30 and 32
relative o each other. Rod rotation members, such as pulleys
98, may be mounted tone end ofeach threaded rod 26A. The
rod rotation members may be driven by a suitable drive
‘meclanism. Por example, ifthe pulleys 98 are used, the drive
‘mectianism may’include drive motor 100 that is operatively
coupled tothe pulleys 98, such as by way ofa deive belt 102
‘The drive motor 100 may be connected toa suitable contol
system (not shown) that adjusts the positioning ofthe firstand
second magnet carirs 4 and 8 whenever tis desired to relax
the magnetic interaction fores, such as at start-up time.
“Although cach of the magnetic drive apparatis embodi-
is discussed above are based on permaneat magnet
US 8,487,484 BI
2
‘arrangements with four mapnets each, other magnet arrange
‘meats would also be possible. Examples include, but are not
Timited (0, magnet arrangements comprising eight magnets,
twelve magnets, sixteen magnets, twenty magnets, 1wenty~
four magnets, et. Like the illstated four-magnet arrange-
nts, these altemative magnet amangements may beconfig-
‘ured as asymmetrical magnet pattem that defines a polygonal
shape corresponding to the number of magnets in cach
arrangement. Mognet atrangements having t%0 (or more)
polygonal magnet pattems ina nested relationship would also
be possible. On exch mapnet carrier side, the magnet pattern
may comprise n-magnet groupings with n adjacent magnetic
poles of ike polarity in ech grouping, In this way, magnet
‘carrier relative rotation wll produce changing matic inter-
sctiois each time the opposing magnet poles are rotatably
‘advanced into mutual coaxial alignment. As inthe ease ofthe
previously-described four-magnet arrangements, there will
be magnet cartier relative rotation positions wherein all
‘opposing magnetic poles in the magnetic interaction zone
between any: ovo opposing magnet carrier: are coaxially
jgned in either NN or NS relationships. In other magnet
carrier lative rotation positions, the opposing magnetic
poles in the magnetic interaction zone between any two
‘opposing magnet carriers will be coaxially aligned in both
INN andl NS relationships, with the number of NN’ and NS
relationships being equal. In general, itis expected that these
characteristic will be produced by any magnet arrangement
having an even numberof magnets, an equal numberof N and
S poles on any given magnet carrer sie, and wherein the N
‘and poles are arranged in magnet groupings having an even
umber of adjacent magnets of like-polary.
Although the magnetic drive apparatus constrictions dis
‘closed ths far have three magnet carriers, Band I2arranged
‘o form dual magnetic interaction zones 154 and 1$B, other
‘constructions would also be possible. Por example, a mage
netic drive apparatus in accordance with the present diselo-
sure may be constructed with two opposing magnet carrors
arranges to forma single magnetic interaction zone, As inthe
previous constructions the opposing magnet arrangements
are configured to produce magnetic interactions when the
‘opposing magnet caries undergo relative rotation,
FIGS. 15-18 illustrate an example magnetic drive appara
tus construction 2D representing a single-magnetc interac-
tion zone embodiment tha uses wo magnet carrer. In the
‘magnetic drive apparatus comsirucion 2D, there is only the
fist magnet carer 4nd the intermediate magnet carrice 12
providing a single magnetic interaction zone 184. The see-
‘ond magnot carrier 8 and the second magnetic interaction
one 15H are not present. The magnetic interactions in the
‘magnetic interaction zone ISA during teatve rotation ofthe
‘opposing magnet carriers 4 and 12 (sce arrows "A" and “B")
produce power stroke forces that cause the magnot eaters ©
undergo relative reciprocation in fist and seoond stroke
ing a transition period between said magnet carriers experi
‘encing substantially no power stoke forces and substantially
‘maximum power stroke forees
3. The apperats of claim I, wherein sai first permanent
‘magnet arrangement, said second permanent magnet arange-
‘ment and ssid third permanent magnet arrangement cach
‘comprise a set of magnets arranged ina magnet patter, sid
‘magnets being oriented on their respective magnet caters to
presenta first metic pole ona first maunet carrier side and
second magoetic pole ona second magnet carrier side
“4. The apparatus of elsim 3, wherein each magnet paitern
‘on any given magnet earier side comprises at lest fist
‘magnet grouping having nadjacem magnetic pols ofa fst
polarity aad a sconnd n-magnet erouping having n adjacent
magnetic poles ofa second polarity
'. The apparatus of claim 4, wherein each magnet potters
has four magnets arranged in a fst two-magnet grouping
having two adjacent N magnetic poles and a second two-
magnet grouping having two adjacent S magnet poles.
6. The uppanitus of claim 8, wherein said frst magnet
‘artier has an interior side that faces fist side of said inter
meiiate magnet carrier to form a fist magnetic interaction
‘one, and wherein said second magnet carrier has an interior
de that faces a second side of said intermediate magnet
‘carrier to form a second magnetic interaction zone.
7. The apparatus of claim 6, wherein said power zones
‘comprise relative rotational positions of said magnet earirs
wherein said opposing magnetic poles of suid fist permanent
‘magnet arrangement, said second permanent magnet arange-
‘ment an said third permanent magnet arrangement arc mt-
ally coaxially aligned with all of said opposing magnetic
poles in said first and second magnetic interaction zones
‘either motually repelling or mutually attracting each other
8, The apparatus of elaim 7, wherein said power stoke
Jorees produce sad relative reciprocation in sad fist stroke
direction when said opposing: maynetie poles in sai fist
‘magnetic interaction zaneall mutually repel eachother while
said opposing magnetic poles in said second magnetic inter
‘ction zone all tually attract each other, and Wherein sad
power stroke forces proce said eativereeiprocaton in said
Second stoke direction when saidoppasing magnetic polesin
Said first magnetic interaction zone all mutually ateact en!
0
2
magnetic poles in said second
‘magnetic interaction zone all mutually repel cach other
9. The apparatus of elsim 6, wherein said dead zones com
prise relative rotational positions of said magnet carriers
‘wherein one half of said opposing magnetie poles in said frst
and second magnetic interaction zones are aligned to muti-
ally repel each other and the other half of said opposing
‘magnetic poles in sid first and second magnetic interaction
‘ones are aljned 9 motually atrat each ther
10. Theapparatusof claim, further including a main shalt
extending though each of said magnet carrer, said maia
shall having a central longitudial axis and being rotatable
about said longitudinal axis and capable of reciprocation
‘long said longitudinal axis
fist end portion of said main shaft being adapted for
‘operative coupling to an input component that rotates
said main shat:
1 second end portion of sad min shaft being adapted for
‘operative coupling tan output component that is driven
by reciprocation of said main sha;
said main shaft being rotatably coupled to ether sad inter-
mediate magnet carier or Sid frst and second magnet
carriers such that rotation of said main shaft about its
longitudinal axis produces sid relative rotation between
said intermediate magnet carrier and said first and sec~
‘ond magnet eaeriers and
ssid main shaft being axially coupled to ether said inter-
‘meslate magnet carrer or said frst and second magnet
carriers sich said relative reciprocation between said
intermediate magnet carier and sad first and second
‘magnet carriers in said fist and second stoke diretions
‘rocces reciprocation of sid main shaft along its lon-
‘Btudinal axis,
11, The apparatus of lai 1, wherein said fist and second
magnet carriers are adjustably positionable ward and away
{rom sid intenmediate magnet carrier in order t adjust the
strength of said magnetie interactions.
12, The apparatus of claim 11, wherein sil fst and see-
fondd magnet carriers are positionable toward and away from
sid intermediate magnet ear by a power driven magnet
carrer positioning system,
13. Amagnetic deve torque converter apparatus, compris
ing:
4 first magnet carer carrying a frst permanent magnet
sarrungemeat
a seond magnet carierearryinga second permanent mag
net arrangement:
‘an intermediate magnet carrce disposed between said fest
‘and second magnet carriers and carrying athid perma
nent magnet arrangement;
‘an input component operatively coupled to either said
intermediate magnet carier or sai first and second
_muagne carriers to producerelativeroiation between sid
intermediate magnet carrier and sai first and second
magnet carers;
sid ist permanent magnet arrangement, said second per-
manent magnet arrangement and said thinl permaneat
magnet arrangement being configured to produce mag
‘neti interactions when said input component produces
relative rotation;
ssid magnetic interactions producing power stroke forces
that cause said intermediate magne carrier ad sd ist
‘and second magnet careers to undergo relative recipro-
ction in ist nd second stroke dirsetions daring power
‘one portions of said relative rotation:
fan outptt component opemtively coupled to cither said
intermediate magnet carier or said fist and second
US 8,487,484 BI
25
‘magnet carriers svc that sid relative reciprocation i
‘tid frst and second stroke directions actustes sid out-
put component:
said magnetic interactions producing. substantially no
power stroke forees during dead zane portions of said
relative rotation, said dead zones comprising relative
rotational positions of said magnet eariers wherein
‘opposing magnetic poles of sid list permanent magnet
arrangement, ssid second permanent magnet arrage>
‘ment and ssid third permanent magnet arrangement ae
‘mutually coaxially aligned but produce a substantially
‘equal balance of push aad pull magnetic forces: and
sid relative rotation and said relative reciprocation being
synchronizable so that said dead zones ean be made to
‘occur proximate to top dead center and bottom dead
‘center positions of said relative reciprocation, and s0
that said power nesoecur between aid top dead center
and bottom dead center relative reciprocation positions
14. The apparatus of claim 13, wherein said relative ra.
tion comprises said first and seoond magnet carriers rotating
inthe same direction orn opposite directions with respoct to
‘each other.
15. The apparatus of claim 13, further including
‘main shaft extending through each of seid magnet car
er, std main shaft having a central longitudinal axis
land being rotatable about said longitodinal axis and
Capable of reciprocation along sad longitudinal axis:
said input component being operatively coupled 0 a frst,
‘end portion of said main shaft to rotate said main sas
ssid output component being operatively coupled toa see~
‘nd end portion of said main shaft he driven by recip=
‘cation of said msi sha
sid main shaft being otatably coupled tocither said inter-
‘mediate magnet cacrer or said frst and second magnet
Carriers such that ssid rotation of said main shall about
its Fongitudinal axis by said input component produces
said relative rotation between sad intermediate magnet
Career and sid fist and second magnet caries: and
said main shat being axially eoupled to ether ssid inter-
‘mediate magnet carter oF said frst and socond magnet
careers sich that said relative reciprocation between
‘sid intermediate magnet carrer and said first and sec=
‘ond magnet cariers in fist and second stroke directions
produces sad reciprocation of Said main shaft along its
Tongitudinal axis,
16, The apparatus of claim 15, further including a synehro-
nization device operatively coupled to provide said synchro-
nizing by synchronizing said main shaft so that sai dead
‘ones are centered proximate (0 suid top dead center and
bottom dead center positions.
17. The apparatus of claim 16, wherein said main shaft is
syucheonized so tht said dead zones are dynamically adjste
able in postion or size.
18, The apparatus of elaim 16, wherein said synehroni
tion device comprises said input componeat, ssid output com-
ponent, and a sensor/feedback system for controlling said
‘input component based on positioning of said output compo-
nent
19, The apparatus of claim 18, wherein said input compo-
nent comprises @ rotary drive motor connected to said main
shalt by a ball-spline input coupling assembly, sad output
‘component comprises a erankshaft connected to said main
shaft by a connecting rod, and said sensor feedback system
‘comprises a sensor arranged to sense rotation of said erank=
shafl and a controller operable to contro sid rotary drive
‘motor in response to crankshaft position signals from sac
0
o
26
20. magnetic drive apparatus, comprising:
first and second opposing magne carters respectively car-
‘ying opposing magnet arrangements;
said opposing magnet arrangements being configured ‘0
‘prodice magneticinteractions when said opposing mag-
net carriers undergo relative rotation;
ssid magnetic interactions producing power stroke forces
that cause said opposing magnet camiers to undergo
relative reciprocation infest and second stroke dir
tions during power zone portions of sid relative rota:
tion;
ssid magnetic interactions producing substantially no
power stroke forees during dead zone portions of said
relative rotation, said dead zones comprising relative
rotational positions of the magnet carriers wherein
‘opposing. magnetic poles of suid. opposing magnet
arrangements are mutually coaxially aligned but pro-
dlucea substantially equal balance of push and pull mag-
note orees; and
sid relative rotation and suid relative reciprocation being
mchronizable 80 that said dead zones can be made t0
‘occur proximate to top dead center and bottom dead
‘center relative recipmeation positions of ssid magnet
carriers, and so that said power zones oceurhetween sid
‘top deal center and bottom dead center relative recipro~
calion positions.
21.4 permanent magnet drive method, comprising
providing opposing magnet cariers respectively carrying
‘opposing magnet srangements, said opposing magnet
arrangements being configured t© produce magnetic
intemsctions when sid opposing. magnet cars
undemo relative rotation
inducing relative rotation between said opposing magnet
‘carrer to produce sid magnetic interactions;
sid magnetic interactions producing power stroke forces
that cause said opposing magnet carriers to undergo
relative reciprocation in first and second stroke disc
tions during power zone portions of said relative ota-
sid magnetic interactions producing. substantially no
‘power stroke forees during dead zane portions of sid
relative rotation, said dead zones comprising relative
‘tational postions of the magnet carriers wherein
‘opposing magnetic poles of suid opposing magnet
arrangements are mutually coaxially aligned but pro-
‘ducea substantially equal balance of push and pull mage
note Forges; and
synchronizing said relative rotation and sid relative recip
rocaton so that said dead zanes occur proximate 1p
dead eeater and bottom dead center postions of said
relative reciprocation, and so that said power zones
‘occur between said top dead center and bottom dead
‘center relative reciprocation positions
22, The method of elsim 21, wherein said synchronizing
includes timing soid relative rotation and said relative ecip-
rmestion so that said dead zones are centered on said op dead
eater and bottom dead center relative recipmocation posi
tions, and said power zones occur between said top dead
center and bottom dead center relative reciprocation posi-
sions.
23, The method of claim 21, wherein said synchronizing
‘includes timing said relative rotation and sai relative recip-
rocation 80 that suid ded zones are dynamically adjusted ia
positon or size
24. magnetic drive apparatus, comprising:
‘opposing magnet carriers respectively carrying opposing
‘mjgnet arrangements;
US 8,487,484 BI
27
sid opposing magnet arrangements having opposing mage
‘atic poles and being configured to produce maguctic
interoctions when said opposing “magnet artiers
undergo relative rtation;
‘tid magnetic interactions producing power stroke forces
that cause said opposing magnet carriers to undergo
relative reciprocation in fist and second stroke direc=
tions during power zone portions of ssid relative tae
tion: and
said relative rotation including rotational dead zones
‘wherein said opposing magnetic poles of said opposing
‘muignetarngements are mutually coaxially aligned to
define an equal number of same-polaity and opposite-
polarity magnetic interactions.
25. A combination comprising twoor more ofthe magnetic
dive apparatus of claim 24 operatively coupled to one oF
‘more rotary input components that induce sid relative rote
tion and operatively coupled to a common reiprocel output
‘component tat js driven by said relative reciprocation,
28
S-ar putea să vă placă și
- Us 568176Document4 paginiUs 568176daveklodavekloÎncă nu există evaluări
- US2876368 - Nuclear BatteryDocument4 paginiUS2876368 - Nuclear BatterydaveklodavekloÎncă nu există evaluări
- US20060163971A1Document10 paginiUS20060163971A1daveklodavekloÎncă nu există evaluări
- Pat1309031 - Hettinger - Arial ConductorsDocument10 paginiPat1309031 - Hettinger - Arial ConductorsdaveklodavekloÎncă nu există evaluări
- US20180012673A1 - TransmutationDocument8 paginiUS20180012673A1 - Transmutationdaveklodaveklo100% (1)
- US20190295733A1 - Pasma Compression Fusion DeviceDocument8 paginiUS20190295733A1 - Pasma Compression Fusion DevicedaveklodavekloÎncă nu există evaluări
- 94-028197-Hydrogen Activated Heat Generation ApparatusDocument5 pagini94-028197-Hydrogen Activated Heat Generation ApparatusdaveklodavekloÎncă nu există evaluări
- Pat119825 Cook InductionCoilsDocument3 paginiPat119825 Cook InductionCoilsdaveklodavekloÎncă nu există evaluări
- Pat685953 Tesla IntensifyingNaturalMediaEffectsDocument6 paginiPat685953 Tesla IntensifyingNaturalMediaEffectsdaveklodavekloÎncă nu există evaluări
- Pat2003 0025416 ToroidallyWoundStatorWindingDocument20 paginiPat2003 0025416 ToroidallyWoundStatorWindingdaveklodavekloÎncă nu există evaluări
- US568176 - TeslaDocument4 paginiUS568176 - TesladaveklodavekloÎncă nu există evaluări
- This Is Not Cold Fusion Proceedings of US Naval Institute September 2018cDocument9 paginiThis Is Not Cold Fusion Proceedings of US Naval Institute September 2018cdaveklodavekloÎncă nu există evaluări
- Pat9306527 - Scalar WavesDocument21 paginiPat9306527 - Scalar Wavesdaveklodaveklo100% (1)
- Webers Electrodynamics For Hydrogen AtomDocument8 paginiWebers Electrodynamics For Hydrogen AtomdaveklodavekloÎncă nu există evaluări
- US20180012673A1 - TransmutationDocument8 paginiUS20180012673A1 - Transmutationdaveklodaveklo100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)