S-ar putea să vă placă și
- Phantom 4 RTK - Flujo de Trabajo de Procesamiento PPKDocument11 paginiPhantom 4 RTK - Flujo de Trabajo de Procesamiento PPKHenryÎncă nu există evaluări
- Vehículos Aéreos No Tripulados (VANT) - AplicacionesDocument25 paginiVehículos Aéreos No Tripulados (VANT) - AplicacionesrogerhenryÎncă nu există evaluări
- DronesDocument5 paginiDronesedinson lenin salvadorÎncă nu există evaluări
- Plan de Tesis - Barrios Esquivel PaoloDocument29 paginiPlan de Tesis - Barrios Esquivel PaoloPaolo Barrios EsquivelÎncă nu există evaluări
- A1ba999a0e53 - BROCHURE DRONES PDFDocument6 paginiA1ba999a0e53 - BROCHURE DRONES PDFjhons_20_Încă nu există evaluări
- Guia Proced Habilitac Autoriz Oper Rpas PDFDocument298 paginiGuia Proced Habilitac Autoriz Oper Rpas PDFAndres CordovaÎncă nu există evaluări
- Configuracion de Modos de VueloDocument24 paginiConfiguracion de Modos de VueloSteven MartinezÎncă nu există evaluări
- Fumigacion Con DronDocument1 paginăFumigacion Con DronAlfredo GascaÎncă nu există evaluări
- Protocolo CENEPRED RPASDocument16 paginiProtocolo CENEPRED RPASarias71-1Încă nu există evaluări
- Presentación TermografíaDocument3 paginiPresentación Termografíakikeblackberry68Încă nu există evaluări
- Informe Geodesico - ChotaDocument16 paginiInforme Geodesico - ChotaAbannto YesicaÎncă nu există evaluări
- Manual Ebee y Ebee Ag v12.1 LINELCONDocument169 paginiManual Ebee y Ebee Ag v12.1 LINELCONNilton Goya CajasÎncă nu există evaluări
- Drones CamarasDocument43 paginiDrones CamarasAngel AlexisÎncă nu există evaluări
- Curso virtual de fotogrametría con dronesDocument92 paginiCurso virtual de fotogrametría con dronesHenry Sosa ZuñigaÎncă nu există evaluări
- Plan de Vuelo - Drone MappingDocument3 paginiPlan de Vuelo - Drone MappingGeminismaxÎncă nu există evaluări
- Fotogrametría Rpa - 1 CursoDocument36 paginiFotogrametría Rpa - 1 Cursoenver05Încă nu există evaluări
- Estudio de Teledetección Con Drones en Olivar (Alozaina, Málaga) - TYC GIS PDFDocument9 paginiEstudio de Teledetección Con Drones en Olivar (Alozaina, Málaga) - TYC GIS PDFCarlos RiveraÎncă nu există evaluări
- FOTOGRAMETRIADocument7 paginiFOTOGRAMETRIAJesus VillegasÎncă nu există evaluări
- Evaluación de Las Comunicaciones Inalámbricas Lora para Enlaces de Telemetría en DronesDocument46 paginiEvaluación de Las Comunicaciones Inalámbricas Lora para Enlaces de Telemetría en DronesVictor Molina RetamalÎncă nu există evaluări
- Instalación Del Módulo de 3DR Ublox GPS + CompassDocument10 paginiInstalación Del Módulo de 3DR Ublox GPS + CompassSteven MartinezÎncă nu există evaluări
- G-DUAS-OPS-ZN01 v3.2 Guia Zonificacion UASyanexosDocument38 paginiG-DUAS-OPS-ZN01 v3.2 Guia Zonificacion UASyanexosaÎncă nu există evaluări
- Tema09-Conociendo El Rpas Phantom 4 ProDocument13 paginiTema09-Conociendo El Rpas Phantom 4 Proreynaldo por siempreÎncă nu există evaluări
- Lista Completa de Parametros de ApmDocument181 paginiLista Completa de Parametros de ApmSteven MartinezÎncă nu există evaluări
- Curso de AgisoftDocument3 paginiCurso de AgisoftWilder Huaraz Flores0% (1)
- 09 AutoPilot Final Mecat R PDFDocument11 pagini09 AutoPilot Final Mecat R PDFAdonai Zapata G.Încă nu există evaluări
- Drones en FotogrametríaDocument5 paginiDrones en FotogrametríalcgovpeÎncă nu există evaluări
- Fotogrametria Con Drones PDFDocument10 paginiFotogrametria Con Drones PDFDANITZA ROMERO FLORESÎncă nu există evaluări
- Drones AplicacionesDocument64 paginiDrones AplicacionesRonald AEÎncă nu există evaluări
- Procesamiento de Levantamientos Topográficos en Sectores Rurales Por Medio de DroneDocument55 paginiProcesamiento de Levantamientos Topográficos en Sectores Rurales Por Medio de DroneHarryson Castro Aponte0% (1)
- FotogrametriaDocument14 paginiFotogrametriaTA JubertÎncă nu există evaluări
- Rap 67 143Document23 paginiRap 67 143Sergio RomeroÎncă nu există evaluări
- TERMOGRAFIADocument20 paginiTERMOGRAFIACarolina AbrilÎncă nu există evaluări
- 5to. Examen Del Curso Virtual de Proyectos de Inversion PúblicaDocument5 pagini5to. Examen Del Curso Virtual de Proyectos de Inversion PúblicaCharles MorganÎncă nu există evaluări
- GPS-RTK en Rpa Xa MDTDocument48 paginiGPS-RTK en Rpa Xa MDTGonzalo Ferrer FumanalÎncă nu există evaluări
- Inspectores Aeronáuticos CNSDocument101 paginiInspectores Aeronáuticos CNSJose Ramirez100% (1)
- Riesgos del uso no autorizado de drones en ColombiaDocument18 paginiRiesgos del uso no autorizado de drones en ColombiaoscarozÎncă nu există evaluări
- EBeeX Finalversion A4 ES Compressed CompressedDocument8 paginiEBeeX Finalversion A4 ES Compressed CompressedYerzyd AlconÎncă nu există evaluări
- TermografíaDocument6 paginiTermografíaFederico PereiraÎncă nu există evaluări
- Anexo 01. Especificaciones TecnicasDocument7 paginiAnexo 01. Especificaciones TecnicasJahir Humberto Nuñez100% (1)
- Relación entre GPR y deflexiones para estimar el estado estructural de un pavimentoDocument113 paginiRelación entre GPR y deflexiones para estimar el estado estructural de un pavimentoaramoscastroÎncă nu există evaluări
- Informe DronDocument20 paginiInforme DronLuis Alberto Aquino CastilloÎncă nu există evaluări
- Fotogrametría Con Drones para TopografíaDocument6 paginiFotogrametría Con Drones para TopografíaEmely NicoleÎncă nu există evaluări
- Curso de Fotogrametria Con Phantom 4 Pro - Ebee y Phantom 4 RTK Virtual SetiembreDocument5 paginiCurso de Fotogrametria Con Phantom 4 Pro - Ebee y Phantom 4 RTK Virtual SetiembreEdilberAntonyChipanaPariÎncă nu există evaluări
- Aplicación de La Fotogrametría Con Droness para La Caracterización de Deslizamientos.Document7 paginiAplicación de La Fotogrametría Con Droness para La Caracterización de Deslizamientos.RonniAmericoSandovalDiazÎncă nu există evaluări
- Examen 02 Fot y TelDocument5 paginiExamen 02 Fot y TelKenlly FC JorkenÎncă nu există evaluări
- Ndvi MMDocument1 paginăNdvi MMPatricio CobosÎncă nu există evaluări
- Familiarizacion Con El RPAS (Hardware, Sofware y Firmware)Document8 paginiFamiliarizacion Con El RPAS (Hardware, Sofware y Firmware)Roberto Riaño Rodríguez100% (1)
- Fotogrametria Con DronesDocument41 paginiFotogrametria Con DronesDiego Gamarra CandiaÎncă nu există evaluări
- 5000 Wingtra Technical Specification 5000 M ESP Final-2 PDFDocument18 pagini5000 Wingtra Technical Specification 5000 M ESP Final-2 PDFHeverth Alarcon RuizÎncă nu există evaluări
- Mod II Fotogrametria SiitecDocument42 paginiMod II Fotogrametria SiitecVideos CaserosÎncă nu există evaluări
- Fotogrametría con dronesDocument1 paginăFotogrametría con dronesMARIA DEL PILAR RIOS CHOQUEÎncă nu există evaluări
- Tesis Final DriverDocument75 paginiTesis Final DriverJeans PerezÎncă nu există evaluări
- JKJHJ D CDocument59 paginiJKJHJ D CMilton PacciÎncă nu există evaluări
- Curso de Fotogrametría y SIG enDocument9 paginiCurso de Fotogrametría y SIG endayis robayoÎncă nu există evaluări
- Aerofotogrametría Con DronDocument11 paginiAerofotogrametría Con DronSergio Guizada ArgolloÎncă nu există evaluări
- Tesis DelgadoDocument36 paginiTesis DelgadoJean Piere Garcia FloresÎncă nu există evaluări
- APM 2.5 y 2.6 Información GeneralDocument19 paginiAPM 2.5 y 2.6 Información GeneralSteven MartinezÎncă nu există evaluări
- 01-07Document7 pagini01-07autocheck.tlÎncă nu există evaluări
- Guía 5Document25 paginiGuía 5Carlos Raul Tarazona MedranoÎncă nu există evaluări
- Alternador Pilotado - Treinamentos - Pt.esDocument51 paginiAlternador Pilotado - Treinamentos - Pt.esJuan Carlos TosiÎncă nu există evaluări
- Agregar o Registrar Una Troncal Análoga en PBXDocument1 paginăAgregar o Registrar Una Troncal Análoga en PBXSteven MartinezÎncă nu există evaluări
- Configuracion de Modos de VueloDocument24 paginiConfiguracion de Modos de VueloSteven MartinezÎncă nu există evaluări
- Amazon x2325Document1 paginăAmazon x2325Steven MartinezÎncă nu există evaluări
- Pasar de Disarmed A ArmedDocument2 paginiPasar de Disarmed A ArmedSteven MartinezÎncă nu există evaluări
- APM 2.5 y 2.6 Información GeneralDocument19 paginiAPM 2.5 y 2.6 Información GeneralSteven MartinezÎncă nu există evaluări
- Lista Completa de Parametros de ApmDocument181 paginiLista Completa de Parametros de ApmSteven MartinezÎncă nu există evaluări
- Instalación Del Módulo de 3DR Ublox GPS + CompassDocument10 paginiInstalación Del Módulo de 3DR Ublox GPS + CompassSteven MartinezÎncă nu există evaluări
- Conexión de La Entrada de RC y MotoresDocument14 paginiConexión de La Entrada de RC y MotoresSteven MartinezÎncă nu există evaluări
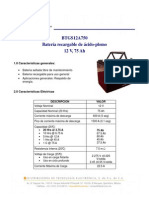
- Spec Bateria Proposito General 12V 75ADocument10 paginiSpec Bateria Proposito General 12V 75ADi&TECÎncă nu există evaluări
- Pozo Tipo SDocument8 paginiPozo Tipo SMayra PuentesÎncă nu există evaluări
- Migra 3Document23 paginiMigra 3Dianis SantosÎncă nu există evaluări
- Herramientas de PodaDocument9 paginiHerramientas de Podacaeduhen100% (1)
- Lista de ChequeoDocument1 paginăLista de ChequeoMarlon GonzalezÎncă nu există evaluări
- Redacción CientíficaDocument5 paginiRedacción CientíficaAndreina Ermoxa100% (1)
- Hinostroza MJDocument207 paginiHinostroza MJRaul Reyes100% (1)
- Los Instrumentos de Percusion OrquestalDocument11 paginiLos Instrumentos de Percusion Orquestalmauricio zapataÎncă nu există evaluări
- Resumen Contabilidad para Administradores.Document22 paginiResumen Contabilidad para Administradores.Gaastoon MartinezÎncă nu există evaluări
- Termodinámicas Tablas Propiedades RefrigerantesDocument7 paginiTermodinámicas Tablas Propiedades RefrigerantesLopez LopezÎncă nu există evaluări
- Tesis de Izaje UltimaDocument130 paginiTesis de Izaje UltimaDelia Chavez OriaÎncă nu există evaluări
- Uso y Manejo de Extintores PortatilesDocument28 paginiUso y Manejo de Extintores PortatilesSandy SerranoÎncă nu există evaluări
- Buenas Prácticas de DocumentaciónDocument21 paginiBuenas Prácticas de Documentacióncarlyan06Încă nu există evaluări
- Factura America MovilDocument2 paginiFactura America MovilKike Apple100% (1)
- CircuitosDocument4 paginiCircuitosAlejandro BlzÎncă nu există evaluări
- Leds Ritmicos, Simples y Mas Avanzado (Luz Audioritmica)Document5 paginiLeds Ritmicos, Simples y Mas Avanzado (Luz Audioritmica)jmartinez21969127Încă nu există evaluări
- Sistema electrofusión tuberías plástico control temperatura soldaduraDocument18 paginiSistema electrofusión tuberías plástico control temperatura soldaduraTONY0389100% (1)
- Sistema TribológicoDocument12 paginiSistema TribológicoEduardo RobledoÎncă nu există evaluări
- Acosta, A. Temas Selectos de Biología I.Document116 paginiAcosta, A. Temas Selectos de Biología I.SaulRodriguezÎncă nu există evaluări
- Decreto 2323 de 2006 Red Nal LaboratoriosDocument11 paginiDecreto 2323 de 2006 Red Nal LaboratoriosClemencia Alvarez VillaÎncă nu există evaluări
- Informe 1Document34 paginiInforme 1LeoVelitaEspinozaÎncă nu există evaluări
- Una Guía Paso Por Paso Sobre El Proceso de Construir Una CasaDocument6 paginiUna Guía Paso Por Paso Sobre El Proceso de Construir Una CasaJerson MoralesÎncă nu există evaluări
- Contar La CienciaDocument308 paginiContar La CienciaCavi LandÎncă nu există evaluări
- Sismorresistencia de Los Materiales ConstructivosDocument8 paginiSismorresistencia de Los Materiales ConstructivosNorma Villaseca ZavalaÎncă nu există evaluări
- Cv-Jhonny Alvarez TovarDocument1 paginăCv-Jhonny Alvarez TovarJhonny Alvarez TovarÎncă nu există evaluări
- El GrafenoDocument12 paginiEl GrafenoBalcazar Flores BryanÎncă nu există evaluări
- Informe de inspección del sistema de bombeo en mina IslayDocument4 paginiInforme de inspección del sistema de bombeo en mina IslayJhony Gallegos GarciaÎncă nu există evaluări
- Proyecto de Trituradora de PlasticosDocument34 paginiProyecto de Trituradora de PlasticosEdwin Sanchez0% (1)
- Trabajo de MetodologiaDocument3 paginiTrabajo de MetodologiaLuis Angel Padilla FlorezÎncă nu există evaluări
- RinconesDocument12 paginiRinconesNayely CastroÎncă nu există evaluări