S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Training 6 WG-210 3. Auflage PDFDocument84 paginiTraining 6 WG-210 3. Auflage PDFSahba Kiyanoush91% (11)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Op Amp NotesDocument34 paginiOp Amp NotesUma ShankarÎncă nu există evaluări
- Blade Service ManualDocument185 paginiBlade Service ManualDiego Alejandro Gomez80% (5)
- LESSON 1 Digital ArtsDocument39 paginiLESSON 1 Digital ArtsCalvin Cabacungan100% (1)
- Dps Spec 201Document58 paginiDps Spec 201serviciobsasÎncă nu există evaluări
- Electronic Library: Quit SelectorDocument4 paginiElectronic Library: Quit SelectorserviciobsasÎncă nu există evaluări
- NPN Epitaxial Kse800/801/803 Silicon Darlington TransistorDocument3 paginiNPN Epitaxial Kse800/801/803 Silicon Darlington TransistorserviciobsasÎncă nu există evaluări
- Circuito de Paso A PasoDocument14 paginiCircuito de Paso A PasoserviciobsasÎncă nu există evaluări
- Electronic Load PDFDocument73 paginiElectronic Load PDFserviciobsasÎncă nu există evaluări
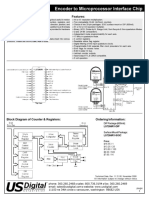
- Encoder To Microprocessor Interface Chip Chip: Features: DescriptionDocument6 paginiEncoder To Microprocessor Interface Chip Chip: Features: DescriptionserviciobsasÎncă nu există evaluări
- TX40 Characteristics - EN RoboticaDocument34 paginiTX40 Characteristics - EN RoboticaserviciobsasÎncă nu există evaluări
- Data SheetDocument14 paginiData SheetSudirman AlimuddinÎncă nu există evaluări
- cd00000052 PDFDocument9 paginicd00000052 PDFserviciobsasÎncă nu există evaluări
- Us 1Document4 paginiUs 1serviciobsasÎncă nu există evaluări
- High Voltage TransistorDocument9 paginiHigh Voltage TransistorRedin Q. AimsÎncă nu există evaluări
- 7923 MemoriaDocument7 pagini7923 MemoriaserviciobsasÎncă nu există evaluări
- Winplace Software User's Manual: Integrated Circuit Technology CorpDocument119 paginiWinplace Software User's Manual: Integrated Circuit Technology CorpOnlineShop ShopÎncă nu există evaluări
- Lecture 3 EngineDocument8 paginiLecture 3 EngineAmrit1995Încă nu există evaluări
- 2 N 60 BDocument9 pagini2 N 60 BCarlos SanchezÎncă nu există evaluări
- 6N60 PDFDocument7 pagini6N60 PDFيوكي آنى سانÎncă nu există evaluări
- Winplace Software User's Manual: Integrated Circuit Technology CorpDocument119 paginiWinplace Software User's Manual: Integrated Circuit Technology CorpOnlineShop ShopÎncă nu există evaluări
- Gal 20 V8 MILDocument6 paginiGal 20 V8 MILserviciobsasÎncă nu există evaluări
- 2SK2761Document2 pagini2SK2761serviciobsasÎncă nu există evaluări
- 74AC74 - 74ACT74 Dual D-Type Positive Edge-Triggered Flip-FlopDocument10 pagini74AC74 - 74ACT74 Dual D-Type Positive Edge-Triggered Flip-FlopserviciobsasÎncă nu există evaluări
- 3pdf Manual PDFDocument39 pagini3pdf Manual PDFserviciobsasÎncă nu există evaluări
- 2 N 60 BDocument9 pagini2 N 60 BCarlos SanchezÎncă nu există evaluări
- Digital Gauging System: Display SeriesDocument2 paginiDigital Gauging System: Display SeriesserviciobsasÎncă nu există evaluări
- 1 Fundamentals of Piezoelectricity: Lead-Free Piezoelectric MaterialsDocument18 pagini1 Fundamentals of Piezoelectricity: Lead-Free Piezoelectric MaterialsJHÎncă nu există evaluări
- Vlsi Unit IvDocument72 paginiVlsi Unit IvDr kishore sanapalaÎncă nu există evaluări
- Soft Start Circuit PDFDocument3 paginiSoft Start Circuit PDFnylashahidÎncă nu există evaluări
- Has 111dg Data Sheet 4921240144 UkDocument8 paginiHas 111dg Data Sheet 4921240144 UkGullu BhargavaÎncă nu există evaluări
- 6 16Document2 pagini6 16Indira KarimovaÎncă nu există evaluări
- EgyE 205 Solar Irradiance & Charge Controller Lab ReportDocument12 paginiEgyE 205 Solar Irradiance & Charge Controller Lab ReportLincoln AzupardoÎncă nu există evaluări
- Arc Geo Mini ManualDocument7 paginiArc Geo Mini ManualhalaÎncă nu există evaluări
- DIL Series Reed Relays: D I L 0 0 - 0 X 0 0 - 0 0 XDocument3 paginiDIL Series Reed Relays: D I L 0 0 - 0 X 0 0 - 0 0 Xjuan manuel patiño moralesÎncă nu există evaluări
- Wa0020.Document16 paginiWa0020.Giri DharanÎncă nu există evaluări
- Digital Scale 340368 - A - D - IE - ENDocument47 paginiDigital Scale 340368 - A - D - IE - ENDimitar KirovÎncă nu există evaluări
- Decimal To BC-Encoder V2Document10 paginiDecimal To BC-Encoder V2Anurag RoyÎncă nu există evaluări
- 11kv Metering CubicleDocument18 pagini11kv Metering CubiclePrashant Nankar100% (1)
- Unit 3 PLC PDFDocument15 paginiUnit 3 PLC PDFMahesh ShendeÎncă nu există evaluări
- Sm-A750fn Common Evapl 3Document2 paginiSm-A750fn Common Evapl 3J Carlos Menacho SÎncă nu există evaluări
- 15EGSADocument1 pagină15EGSAmandahandriÎncă nu există evaluări
- Automatic Medicine Vending System-Medical AtmDocument6 paginiAutomatic Medicine Vending System-Medical Atmjordan ruzarioÎncă nu există evaluări
- MGE Motors: Installation and Operating InstructionsDocument76 paginiMGE Motors: Installation and Operating InstructionsJocelito MaiaÎncă nu există evaluări
- Batch Basics Three Levels Doing Batch System Structure Phase Logic Interface PricingDocument21 paginiBatch Basics Three Levels Doing Batch System Structure Phase Logic Interface Pricingtricky777Încă nu există evaluări
- NPR in SIS 2011Document10 paginiNPR in SIS 2011manu_chatÎncă nu există evaluări
- DK1913 CH08Document22 paginiDK1913 CH08Maniraj PerumalÎncă nu există evaluări
- Water Quality Monitoring and Notification System U PDFDocument4 paginiWater Quality Monitoring and Notification System U PDFMukund KumarÎncă nu există evaluări
- Wiring Digram For ACDocument3 paginiWiring Digram For ACahmed HOSNYÎncă nu există evaluări
- Assignment 1Document4 paginiAssignment 1Jean100% (1)
- Wavelet Transform Approach To Distance: Protection of Transmission LinesDocument6 paginiWavelet Transform Approach To Distance: Protection of Transmission LinesthavaselvanÎncă nu există evaluări
- SQL Contadores de PerformanceDocument7 paginiSQL Contadores de Performancejemfo761Încă nu există evaluări
- CMC Database Integrity Declaration (DID) CMCE 1510 03Document1 paginăCMC Database Integrity Declaration (DID) CMCE 1510 03Mohd ShahÎncă nu există evaluări
- Modernization of Relay ProtectionDocument5 paginiModernization of Relay Protectiontecnologia para el cambioÎncă nu există evaluări