S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hlep / Vsax: High Performance Cryogenic Reciprocating PumpsDocument4 paginiHlep / Vsax: High Performance Cryogenic Reciprocating Pumpsbarun1977Încă nu există evaluări
- Vibration BookDocument152 paginiVibration Bookrez_babu7430Încă nu există evaluări
- Afs - 2002 GasunieDocument18 paginiAfs - 2002 Gasuniedoraq7975Încă nu există evaluări
- Vickers Valve Kftg4v3kfdg4v3Document20 paginiVickers Valve Kftg4v3kfdg4v3Siju Mon SÎncă nu există evaluări
- Overallstructure PDFDocument11 paginiOverallstructure PDFChhoan NhunÎncă nu există evaluări
- Steam Turbines Basic Information - Power Generation in PakistanDocument12 paginiSteam Turbines Basic Information - Power Generation in Pakistannomi607Încă nu există evaluări
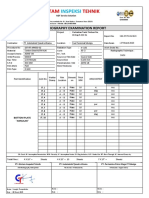
- Pt. Gintam Tehnik: InspeksiDocument5 paginiPt. Gintam Tehnik: Inspeksirizky youlandaÎncă nu există evaluări
- Me6302 - Manufacturing Technology - I: Iii Semester Mechanical EngineeringDocument69 paginiMe6302 - Manufacturing Technology - I: Iii Semester Mechanical EngineeringamdevaÎncă nu există evaluări
- Toyota Celica Wiring Diagram 1993Document18 paginiToyota Celica Wiring Diagram 1993Gary Reynolds100% (2)
- Assignment No. 1 Design Basis Report G+5 BuildingDocument34 paginiAssignment No. 1 Design Basis Report G+5 BuildingMerijanÎncă nu există evaluări
- Chief Engineer's Standing Instructions.Document3 paginiChief Engineer's Standing Instructions.prashant manhasÎncă nu există evaluări
- Yawei Pressbrake ManualDocument54 paginiYawei Pressbrake ManualWayne Hoppe100% (1)
- Owners manual for Maveric GK-32A go kartDocument18 paginiOwners manual for Maveric GK-32A go kartedgar santanaÎncă nu există evaluări
- Induction Motor Load Test AnalysisDocument6 paginiInduction Motor Load Test AnalysisCønstäh Van Der WüppertälärîanskíhÎncă nu există evaluări
- Aircraft Maintenance Logbook TemplateDocument22 paginiAircraft Maintenance Logbook TemplateMoncef Abd Elaziz DrifÎncă nu există evaluări
- USE of Evans & Duncans ChartDocument39 paginiUSE of Evans & Duncans ChartAsif Mostafa AnikÎncă nu există evaluări
- Cee 451 Lecture 8Document23 paginiCee 451 Lecture 8ahmed almhjaniÎncă nu există evaluări
- Biffi IS2000Document16 paginiBiffi IS2000Kolbert ArpadÎncă nu există evaluări
- Abs PDFDocument2 paginiAbs PDFAdonis BasilioÎncă nu există evaluări
- 11 10K Double Cameron U BOPDocument2 pagini11 10K Double Cameron U BOPbalaji baluÎncă nu există evaluări
- ASTM A153 Guide for Galvanized Hardware & FastenersDocument5 paginiASTM A153 Guide for Galvanized Hardware & FastenersMekhmanÎncă nu există evaluări
- Rectangular DuctDocument67 paginiRectangular DuctAUCE9802100% (3)
- Nook Jack CatalogDocument212 paginiNook Jack CatalogSakahi SharmaÎncă nu există evaluări
- Power Steering: Camber, Caster, Under Steering, Over Steering EtcDocument63 paginiPower Steering: Camber, Caster, Under Steering, Over Steering EtcShravan Bunny DuaÎncă nu există evaluări
- Heavy lifting skidding system specificationsDocument1 paginăHeavy lifting skidding system specificationsm4l4ysiaÎncă nu există evaluări
- Volvo Ecr50D: Parts CatalogDocument469 paginiVolvo Ecr50D: Parts CataloggiselleÎncă nu există evaluări
- Probset4. EnergybalancesDocument4 paginiProbset4. EnergybalancesUmmu Qurratul Aini MansorÎncă nu există evaluări
- Manual Motor Crrcpro26iDocument8 paginiManual Motor Crrcpro26ieduardo_albornoz_5Încă nu există evaluări
- Unfired Pressure VesselDocument30 paginiUnfired Pressure VesselSrinivasan RajenderanÎncă nu există evaluări
- Mechanism and Robot Kinematics: Anirvan DasguptaDocument122 paginiMechanism and Robot Kinematics: Anirvan Dasguptaसुमित शर्माÎncă nu există evaluări