S-ar putea să vă placă și
- TD - 4 - CEM Et QEEDocument4 paginiTD - 4 - CEM Et QEENguefa FabriceÎncă nu există evaluări
- TP 02 Le VacceurDocument8 paginiTP 02 Le VacceurIssam Rälph LåûręnÎncă nu există evaluări
- TP 03Document2 paginiTP 03Halouane YacineÎncă nu există evaluări
- TP Electronique REDRESSEMENT FILTRAGE Par Armel-Sitou AfanouDocument11 paginiTP Electronique REDRESSEMENT FILTRAGE Par Armel-Sitou Afanouarmel-afanou-793886% (37)
- Circuit Anal MIP2Document78 paginiCircuit Anal MIP2Junior ZangÎncă nu există evaluări
- Poly Electronik 1Document76 paginiPoly Electronik 1fatima zahra ettalhyÎncă nu există evaluări
- TP Reseau ElectriqueDocument12 paginiTP Reseau ElectriqueAmine MohamedÎncă nu există evaluări
- TP N°04 - Variation de Vitesse Du MAS Alimenté Par OnduleurDocument8 paginiTP N°04 - Variation de Vitesse Du MAS Alimenté Par OnduleurYou CefÎncă nu există evaluări
- Correction-de-lexamen-Module-Electronique-de-puissance-Avancée (1) .TextMarkDocument8 paginiCorrection-de-lexamen-Module-Electronique-de-puissance-Avancée (1) .TextMarkNabil LrÎncă nu există evaluări
- Cour ElectroniqueDocument65 paginiCour ElectroniqueFAKEHI EL KHAILIÎncă nu există evaluări
- Elec3 Tension PuissanceDocument20 paginiElec3 Tension PuissanceRéunion Ram100% (1)
- M06 Electronique Et Automatisme.Document139 paginiM06 Electronique Et Automatisme.yassin nitroÎncă nu există evaluări
- Examen Session Normale 2019-1Document4 paginiExamen Session Normale 2019-1marwanÎncă nu există evaluări
- TMP 643Document1 paginăTMP 643FiroDjinsoNanoÎncă nu există evaluări
- TP Reseau ElectriqueDocument12 paginiTP Reseau ElectriqueHatim Anas89% (9)
- Chap1 Association Mcc-Convertisseurs Drid2020Document16 paginiChap1 Association Mcc-Convertisseurs Drid2020Mohamed BouÎncă nu există evaluări
- Université Djillali Liabès de Sidi Bel-Abbès Faculté de Génie Electrique Département D'electrotechnique Master 1 en Machines ElectriquesDocument7 paginiUniversité Djillali Liabès de Sidi Bel-Abbès Faculté de Génie Electrique Département D'electrotechnique Master 1 en Machines Electriquesabdeldjabbar14Încă nu există evaluări
- L Compensation de L Energie Reactive Et Filtrage Des HarmoniquesDocument26 paginiL Compensation de L Energie Reactive Et Filtrage Des HarmoniquesSaleh ZeydiÎncă nu există evaluări
- Alimentations Electrique Du TramwayDocument4 paginiAlimentations Electrique Du TramwaymohamedÎncă nu există evaluări
- ENPUDocument9 paginiENPUASSE Jean BernardÎncă nu există evaluări
- TP ConvertiDocument26 paginiTP ConvertiMALLOUK .MOUTAOUAKILÎncă nu există evaluări
- GM105Document62 paginiGM105Faîçal JellaliÎncă nu există evaluări
- TP Redressement FiltrageDocument12 paginiTP Redressement Filtrageواعر ياسينÎncă nu există evaluări
- Cours moteurCCDocument9 paginiCours moteurCClarabiÎncă nu există evaluări
- 5 Ea DSDocument12 pagini5 Ea DSAhmed BouzoffaraÎncă nu există evaluări
- TP1 - Etude D'une Diode À JonctionDocument7 paginiTP1 - Etude D'une Diode À JonctionSoundous TayssirÎncă nu există evaluări
- TP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouDocument11 paginiTP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouHamid BendjelloulÎncă nu există evaluări
- LP Ch4 Support Cours m1 2 - Elnp - LP Meca Auto 2020 2021Document11 paginiLP Ch4 Support Cours m1 2 - Elnp - LP Meca Auto 2020 2021AYMAN COUKIÎncă nu există evaluări
- TP EP NS644 sg12Document40 paginiTP EP NS644 sg12Ñar ĎjesÎncă nu există evaluări
- TDs Electronique de Puissance AvancéeDocument18 paginiTDs Electronique de Puissance Avancéeبكر بكرÎncă nu există evaluări
- C BR FR HDR 01Document38 paginiC BR FR HDR 01Serge RINAUDOÎncă nu există evaluări
- TD - 2 - CEM Et QEE - GESI - 3 & ROI - 4 EX - FGIDocument4 paginiTD - 2 - CEM Et QEE - GESI - 3 & ROI - 4 EX - FGIsame100% (1)
- Sq2 Ep 2022 MohouaDocument4 paginiSq2 Ep 2022 MohouaJulesÎncă nu există evaluări
- Projet4 Evaluation Electronique de PuissanceDocument7 paginiProjet4 Evaluation Electronique de PuissanceAllegro Presto ModeratoÎncă nu există evaluări
- Electronique FondamentaleDocument71 paginiElectronique FondamentaleKenrō Jōten100% (2)
- Cours ET 1A ImpDocument69 paginiCours ET 1A ImprairoaeiÎncă nu există evaluări
- Diagrame CirculaireDocument9 paginiDiagrame CirculairedertÎncă nu există evaluări
- TP 2Document8 paginiTP 2d2dp76yjcmÎncă nu există evaluări
- Physics SolutionsDocument41 paginiPhysics SolutionsHannah VsÎncă nu există evaluări
- Alternateur TriphaseDocument6 paginiAlternateur TriphaseBabacar TounkaraÎncă nu există evaluări
- 1 Etude Expérimentale: Terminale Génie Electrotechnique B-3-2-1-Conversion de Tension Continue en Courant ContinuDocument5 pagini1 Etude Expérimentale: Terminale Génie Electrotechnique B-3-2-1-Conversion de Tension Continue en Courant ContinuKader SaidaneÎncă nu există evaluări
- TP 1 Eln-2Document6 paginiTP 1 Eln-2wailbba2003Încă nu există evaluări
- Chapitre 1 - Electricté Générale en Régime VariableDocument7 paginiChapitre 1 - Electricté Générale en Régime Variableleemax_83Încă nu există evaluări
- TD Coe302Document17 paginiTD Coe302Sarah HadiÎncă nu există evaluări
- Physique Appli 2002Document13 paginiPhysique Appli 2002bayaÎncă nu există evaluări
- TP 1: Commande D'Une Machine A Courant ContinuDocument7 paginiTP 1: Commande D'Une Machine A Courant Continuhakimchihab67% (3)
- Chapitre 1 - LOIS ET THÉORÈMES DE CIRCUITSDocument12 paginiChapitre 1 - LOIS ET THÉORÈMES DE CIRCUITSYounes MozayineÎncă nu există evaluări
- TP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouDocument11 paginiTP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou Afanoukima lachgarÎncă nu există evaluări
- TD4 - Electronique Des Systèmes - OscillateursDocument3 paginiTD4 - Electronique Des Systèmes - OscillateursIhssan KHÎncă nu există evaluări
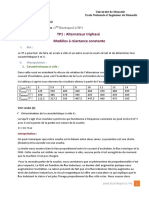
- TP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeDocument2 paginiTP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeSarra SdiriÎncă nu există evaluări
- TP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeDocument2 paginiTP1: Alternateur Triphasé Modèles À Réactance Constante: Réaliser Par: Hassine Abir Classe & Filiére & GroupeSarra SdiriÎncă nu există evaluări
- Chap II Red Mono NCDocument13 paginiChap II Red Mono NCHadi HamzehÎncă nu există evaluări
- Série TDDocument2 paginiSérie TDpastosÎncă nu există evaluări
- Pub Charge Electronique Cnriut Auxerre 2017Document4 paginiPub Charge Electronique Cnriut Auxerre 2017Hary John Tsivery Rakotonjak'sParowÎncă nu există evaluări
- Électricité IndustrielleDocument11 paginiÉlectricité Industriellebaazizw1Încă nu există evaluări
- TP 5 - Eln Pour L2 ELT Diode 2023 2024Document9 paginiTP 5 - Eln Pour L2 ELT Diode 2023 2024deltahamza31Încă nu există evaluări
- Cours Du DR MESSODocument44 paginiCours Du DR MESSOThamar GomaÎncă nu există evaluări
- 5 - Association Convertisseur - Moteur À Courant ContinuDocument54 pagini5 - Association Convertisseur - Moteur À Courant Continurajaa latifi100% (1)
- Fascicule de Travaux Pratiques PDFDocument62 paginiFascicule de Travaux Pratiques PDFLEBONGO100% (1)
- Axe 1Document4 paginiAxe 1Maryem Reyane100% (1)
- 1895 1242 50 Le Cinema D Attraction Le Film Des Premiers Temps Son Spectateur Et L Avant GardeDocument12 pagini1895 1242 50 Le Cinema D Attraction Le Film Des Premiers Temps Son Spectateur Et L Avant GardeIoana MoraruÎncă nu există evaluări
- Innervation Du Membre InférieurDocument13 paginiInnervation Du Membre InférieurOumar Abba AtaÎncă nu există evaluări
- Support de Cours N 1 Les Tâches PDFDocument54 paginiSupport de Cours N 1 Les Tâches PDFKarzaz YassineÎncă nu există evaluări
- XYZ110Document49 paginiXYZ110Bijio FreddÎncă nu există evaluări
- FORCES ET EQUILIBRE (Classe de 2nde)Document12 paginiFORCES ET EQUILIBRE (Classe de 2nde)Tsiory IriantsoaÎncă nu există evaluări
- CDM 10Document20 paginiCDM 10TRAOREÎncă nu există evaluări
- MemoireDocument4 paginiMemoireMohamedsalah chaibrassouÎncă nu există evaluări
- Efforts Sur Les DenturesDocument13 paginiEfforts Sur Les DenturesMll RaghebÎncă nu există evaluări
- Amde CDocument16 paginiAmde CaminehamadiÎncă nu există evaluări
- Partie 1Document35 paginiPartie 1mariemattia84Încă nu există evaluări
- Propulseur Electromagnétique - CoilGun4COCLUSIONDocument1 paginăPropulseur Electromagnétique - CoilGun4COCLUSIONMAD-BONDOÎncă nu există evaluări
- Spirax Sarco Positionneur Pneumatique Series PP5 - Spirax Sarco PDFDocument14 paginiSpirax Sarco Positionneur Pneumatique Series PP5 - Spirax Sarco PDFe-genieclimatique.comÎncă nu există evaluări
- LE LIVRE DES DOUZE PORTES de l'ALCHIMIEDocument7 paginiLE LIVRE DES DOUZE PORTES de l'ALCHIMIEBelhamissiÎncă nu există evaluări
- Integration DerivationDocument4 paginiIntegration DerivationSafaa BelagounÎncă nu există evaluări
- (PDF) CORRIGÉS Du Cahier D'exercices Le Nouveau Taxi 2 Carol Dias - Academia - Edu 2 PDFDocument1 pagină(PDF) CORRIGÉS Du Cahier D'exercices Le Nouveau Taxi 2 Carol Dias - Academia - Edu 2 PDFVika HlukhaÎncă nu există evaluări
- Demarrage Avec Des ResistancesDocument3 paginiDemarrage Avec Des ResistanceshocinekhanfriÎncă nu există evaluări
- Résumé Test D'hypothèsesDocument3 paginiRésumé Test D'hypothèsesAmira GhazouaniÎncă nu există evaluări
- Quelques Critères D - Inspection D - Une Classe-1Document3 paginiQuelques Critères D - Inspection D - Une Classe-1mayaÎncă nu există evaluări
- Aimé Forest (Intro + Cap 1-4) La Structure Métaphysique Du Concret Selon Saint Thoamsa D'aquinDocument69 paginiAimé Forest (Intro + Cap 1-4) La Structure Métaphysique Du Concret Selon Saint Thoamsa D'aquinMoacir N de Oliveira100% (1)
- Linguistique Au NigerDocument327 paginiLinguistique Au NigerAbdourahmane MohamedÎncă nu există evaluări
- Bon de Commande LIVRES 2nde 20 21 PDFDocument1 paginăBon de Commande LIVRES 2nde 20 21 PDFAziz BoughanmiÎncă nu există evaluări
- Cha Uffe Eau AtlanticDocument68 paginiCha Uffe Eau Atlanticmathieu.lagier.mlagÎncă nu există evaluări
- PHP - Fonctions Sur Les Chaînes de Caractères - ManualDocument5 paginiPHP - Fonctions Sur Les Chaînes de Caractères - ManualFélicien Dialaboré DjibaÎncă nu există evaluări
- Aduc Distrib RéservoirDocument111 paginiAduc Distrib Réservoirmicheka100% (1)
- Cours CHM 104 - 2020-2021Document61 paginiCours CHM 104 - 2020-2021ismaelsalissou3Încă nu există evaluări
- PFE LAHOUAICHRI AbdessadekDocument55 paginiPFE LAHOUAICHRI Abdessadekabdomarin100% (1)
- MEMOIRE Énergie RenoDocument68 paginiMEMOIRE Énergie RenoFerdaous AbdelmalekÎncă nu există evaluări
- Bibliographie Competences de VieDocument15 paginiBibliographie Competences de VieAmine Azair100% (1)
- Algo Chapitre 3Document14 paginiAlgo Chapitre 3abdo rahemene hajjiÎncă nu există evaluări