S-ar putea să vă placă și
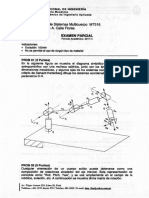
- Curso: Dinámica de Sistemas Iviuiiicuerpo Ivit516 Profesor: Ing. Iván A. Calle Flores Fecha: 08/05/18 Hora: 8-10 I 1 Fray 2018Document8 paginiCurso: Dinámica de Sistemas Iviuiiicuerpo Ivit516 Profesor: Ing. Iván A. Calle Flores Fecha: 08/05/18 Hora: 8-10 I 1 Fray 2018KEVIN MANUEL IGLESIAS REYESÎncă nu există evaluări
- Informe Lab. 6Document11 paginiInforme Lab. 6chrflomÎncă nu există evaluări
- Examen EstaticaDocument3 paginiExamen EstaticaAna Sofia Parra NiviaÎncă nu există evaluări
- Ejercicio 4 Barras en WordDocument28 paginiEjercicio 4 Barras en WordJose Angel MitlÎncă nu există evaluări
- Algoritmo D-H robot KUKADocument5 paginiAlgoritmo D-H robot KUKAMario Alberto Mamani Pariapaza0% (1)
- Parcial 2017 2Document4 paginiParcial 2017 2Cesar VeraÎncă nu există evaluări
- Modelo de Informe Feria de ProyectosDocument4 paginiModelo de Informe Feria de ProyectosLuis Felipe CorreaÎncă nu există evaluări
- UNI-INGMEC-MT223-EXPAR-01AGO20Document4 paginiUNI-INGMEC-MT223-EXPAR-01AGO20juancitoÎncă nu există evaluări
- Examen Parcial 2018-IDocument2 paginiExamen Parcial 2018-IGabriel Andrés PLÎncă nu există evaluări
- ParcialDocument10 paginiParcialJesús SarriaÎncă nu există evaluări
- Tarea 3 de Control Clasico Aplicacion de Ecuaciones Diferenciales A CircuitosDocument2 paginiTarea 3 de Control Clasico Aplicacion de Ecuaciones Diferenciales A CircuitosKevinSanchezÎncă nu există evaluări
- TP Diagrama de Actividades MúltiplesDocument3 paginiTP Diagrama de Actividades MúltiplesClaudia GandiniÎncă nu există evaluări
- Sistemas de suspensión, dirección y frenos de vehículosDocument3 paginiSistemas de suspensión, dirección y frenos de vehículosRodolfo Tapia Ramirez0% (1)
- Transformadores en ParaleloDocument29 paginiTransformadores en Paralelolandoa jun100% (2)
- Informe Transformada de LaplaceDocument6 paginiInforme Transformada de LaplaceJosé LuisÎncă nu există evaluări
- Practica 3Document3 paginiPractica 3Rodolfo Tapia RamirezÎncă nu există evaluări
- Mecanismos cuatro barras y biela manivelaDocument12 paginiMecanismos cuatro barras y biela manivelaRicardo Garcia FuentesÎncă nu există evaluări
- Selección de Herramientas y Cálculo de Parámetros en FresadoDocument5 paginiSelección de Herramientas y Cálculo de Parámetros en FresadoJuan Martín CastroÎncă nu există evaluări
- Fenomenologia Del Convert Id or TenienteDocument4 paginiFenomenologia Del Convert Id or TenienteYelissa Contreras GálvezÎncă nu există evaluări
- Exam Sustitutorio 2022-IiDocument2 paginiExam Sustitutorio 2022-IiFranklin MendozaÎncă nu există evaluări
- Boletin T4 Estatica ElectronicaDocument5 paginiBoletin T4 Estatica Electronicaxx6vhyj4cmÎncă nu există evaluări
- SEMESTRAL Procesos F Ind - 2021Document6 paginiSEMESTRAL Procesos F Ind - 2021Rosa WuÎncă nu există evaluări
- Examen 2P Arq Robots Ene-Jun 21Document1 paginăExamen 2P Arq Robots Ene-Jun 21Carlos Cordero PérezÎncă nu există evaluări
- Accesorios y Equipos Auxiliares para CalderasDocument6 paginiAccesorios y Equipos Auxiliares para CalderasAnonymous ZAr1RKÎncă nu există evaluări
- Mecanizado de varios puntos: fresado y brochadoDocument11 paginiMecanizado de varios puntos: fresado y brochadoRamiro Genecis100% (1)
- Ean Programa Procesos Térmicos 2018-s1Document2 paginiEan Programa Procesos Térmicos 2018-s1Eder Stif Garcia MorenoÎncă nu există evaluări
- Examen Parcial MC589 A 2018Document6 paginiExamen Parcial MC589 A 2018Larry BerriosÎncă nu există evaluări
- Parcial A111 SCDocument2 paginiParcial A111 SCsandra milena rueda rojasÎncă nu există evaluări
- LABORATORIO N°1 ElectronicaDocument12 paginiLABORATORIO N°1 ElectronicaDanielÁdmCalderonÎncă nu există evaluări
- Wuolah Free Lab Exam 18 19 SoluciónDocument4 paginiWuolah Free Lab Exam 18 19 Soluciónguillemol1Încă nu există evaluări
- Mecánica de Suelos: Segundo Examen (1er. Semestre 2015)Document14 paginiMecánica de Suelos: Segundo Examen (1er. Semestre 2015)Daniel ChuraÎncă nu există evaluări
- Plan de estudios Ing Mecánica FES Aragón UNAMDocument2 paginiPlan de estudios Ing Mecánica FES Aragón UNAMJavier CastañedaÎncă nu există evaluări
- 04 Analisis de Corriente de Mallas PDFDocument4 pagini04 Analisis de Corriente de Mallas PDFSanti SampÎncă nu există evaluări
- Descarga PEMSUNDocument4 paginiDescarga PEMSUNEdison Sanchez OrtizÎncă nu există evaluări
- 202-GE503 - SUSTI - Parte A y Parte BDocument3 pagini202-GE503 - SUSTI - Parte A y Parte BMARIZA NICOLLE JIMENEZ POLOÎncă nu există evaluări
- Teorema de Thévenini y NortonDocument5 paginiTeorema de Thévenini y NortonJ. JOAN RAMIREZ CASTROÎncă nu există evaluări
- Universidad Nacional de Ingeniería: MT417 B 2022-IDocument2 paginiUniversidad Nacional de Ingeniería: MT417 B 2022-INate River Near Vega HerreraÎncă nu există evaluări
- Examanen Final DISPOSICIÓN DE PLANTA Frank Bello PeraltaDocument5 paginiExamanen Final DISPOSICIÓN DE PLANTA Frank Bello PeraltaDeynis Cr Palomino LimayllaÎncă nu există evaluări
- Solucion de Practica de Control AutomaticoDocument8 paginiSolucion de Practica de Control AutomaticoChristian Choquehuanca PacoriÎncă nu există evaluări
- Labortorios V-23Document14 paginiLabortorios V-23Emily CedeñoÎncă nu există evaluări
- MT233 20211 EpDocument4 paginiMT233 20211 EpjuancitoÎncă nu există evaluări
- Segunda Práctica Grupal - Dinamica 2022-IIDocument1 paginăSegunda Práctica Grupal - Dinamica 2022-IIMatematica Fisica EstadisticaÎncă nu există evaluări
- Bombas Centrífugas Usadas Como Turbinas: Consideraciones para Optimizar Su PerfomanceDocument10 paginiBombas Centrífugas Usadas Como Turbinas: Consideraciones para Optimizar Su PerfomanceoaaudisioÎncă nu există evaluări
- Determinación de pérdidas de carga en tuberías y accesorios en el Laboratorio de Mecánica de Fluidos e Hidráulica de la UPLADocument34 paginiDeterminación de pérdidas de carga en tuberías y accesorios en el Laboratorio de Mecánica de Fluidos e Hidráulica de la UPLAjorgeÎncă nu există evaluări
- Diseño de tablero de control y mando con temporizadores y PLCDocument12 paginiDiseño de tablero de control y mando con temporizadores y PLCLUIS ALBERTO SANCHEZ RIOSÎncă nu există evaluări
- Boletin - T4 CinetoestaticaDocument7 paginiBoletin - T4 CinetoestaticaAdrian Perez PeñaÎncă nu există evaluări
- Electrónica Aplicada 1 - 3Document3 paginiElectrónica Aplicada 1 - 3William Mulli AtamarÎncă nu există evaluări
- Examen parcial de control II de la UNI con 4 preguntas y un problemaDocument3 paginiExamen parcial de control II de la UNI con 4 preguntas y un problemaPatrick Gilmar Flores FloresÎncă nu există evaluări
- PRACTICAS DE CAMPO 1-2 Cinta y MangueraDocument4 paginiPRACTICAS DE CAMPO 1-2 Cinta y MangueraJesus Elias SanchezÎncă nu există evaluări
- Guia de Lab Señales y SistemasDocument8 paginiGuia de Lab Señales y Sistemasfayder diazÎncă nu există evaluări
- Práctica de McuDocument5 paginiPráctica de McuKEVIN JACKSON MARCILLO ZAMBRANOÎncă nu există evaluări
- Laboratorio Control Teoría UTP PanamáDocument6 paginiLaboratorio Control Teoría UTP PanamáJorge Isaac Flores SamaniegoÎncă nu există evaluări
- Sustit ML 611-C 2020-IiDocument2 paginiSustit ML 611-C 2020-IiLeyton MamaniÎncă nu există evaluări
- Control de procesos industrialesDocument13 paginiControl de procesos industrialesMauricio SalinasÎncă nu există evaluări
- Informe 1 - MT227 BDocument21 paginiInforme 1 - MT227 BCesar Maza OlivaresÎncă nu există evaluări
- Boletin - T3 Cinemática AlumnosDocument13 paginiBoletin - T3 Cinemática Alumnosxx6vhyj4cmÎncă nu există evaluări
- Cal TE-44 ISISA 2022Document1 paginăCal TE-44 ISISA 2022emanuel sandovalÎncă nu există evaluări
- Informe 4 Tiempo de Residencia de EspesadoresDocument11 paginiInforme 4 Tiempo de Residencia de EspesadoresJOSE FERNANDO PISCO HUANCCOLLUCHOÎncă nu există evaluări
- Problemas resueltos de Hidráulica de CanalesDe la EverandProblemas resueltos de Hidráulica de CanalesEvaluare: 4.5 din 5 stele4.5/5 (7)
- Diseño de sistemas termofluidos: Una visión integradoraDe la EverandDiseño de sistemas termofluidos: Una visión integradoraÎncă nu există evaluări
- Sesión Mat Iv Ciclo 23 de JunioDocument5 paginiSesión Mat Iv Ciclo 23 de JunioCesar VeraÎncă nu există evaluări
- Anexo Miercoles 23 - Cuaderno de Trabajo Matematica 3°Document4 paginiAnexo Miercoles 23 - Cuaderno de Trabajo Matematica 3°Cesar VeraÎncă nu există evaluări
- Ensayo de ArenasDocument18 paginiEnsayo de ArenasmanuelÎncă nu există evaluări
- ApuntesDocument2 paginiApuntesCesar VeraÎncă nu există evaluări
- Articulo Gestin Riego Tecnificado Completo PDFDocument14 paginiArticulo Gestin Riego Tecnificado Completo PDFVan SanchezÎncă nu există evaluări
- EDO de Primer OrdenDocument7 paginiEDO de Primer OrdenCesar VeraÎncă nu există evaluări
- Tubo de ReynoldsDocument12 paginiTubo de ReynoldsCesar VeraÎncă nu există evaluări
- Impactos Desastres NaturalesDocument8 paginiImpactos Desastres NaturalesCesar VeraÎncă nu există evaluări
- Monografia Ingenieria Economica 2020 1Document4 paginiMonografia Ingenieria Economica 2020 1Ketszmell Jheydol Tello TrujilloÎncă nu există evaluări
- Informe MT247Document35 paginiInforme MT247Cesar VeraÎncă nu există evaluări
- Gauss LegendreDocument4 paginiGauss LegendreDon IntercadÎncă nu există evaluări
- Newton CottesDocument2 paginiNewton CottesCesar VeraÎncă nu există evaluări
- EDO Sistemas y Orden SuperiorDocument11 paginiEDO Sistemas y Orden SuperiorDon IntercadÎncă nu există evaluări
- Euler PDFDocument1 paginăEuler PDFDon IntercadÎncă nu există evaluări
- Valor Frontera PDFDocument1 paginăValor Frontera PDFCesar VeraÎncă nu există evaluări
- EDO Sistemas y Orden SuperiorDocument11 paginiEDO Sistemas y Orden SuperiorDon IntercadÎncă nu există evaluări
- Problema Del Valor FronteraDocument6 paginiProblema Del Valor FronteraCesar VeraÎncă nu există evaluări
- Ejemplo de Aplicacion de Metodos NumericosDocument10 paginiEjemplo de Aplicacion de Metodos NumericosJesus UgarteÎncă nu există evaluări
- Integración numérica fórmulas Newton-CottesDocument6 paginiIntegración numérica fórmulas Newton-CottesRogger MezaÎncă nu există evaluări
- Informe MT247Document35 paginiInforme MT247Cesar VeraÎncă nu există evaluări
- Sensores OptiCosDocument52 paginiSensores OptiCosCesar VeraÎncă nu există evaluări
- Dibuje Un OR-Analógico Utilizando Los Sensores 1M35 y Una Varilla de de Acero Cromado, paraDocument1 paginăDibuje Un OR-Analógico Utilizando Los Sensores 1M35 y Una Varilla de de Acero Cromado, paraCesar VeraÎncă nu există evaluări
- 01 Intro Ducci On SMDocument10 pagini01 Intro Ducci On SMFreedy Sotelo ValerÎncă nu există evaluări
- Adquisición de Datos: 6. Principio Electromagnético en SensoresDocument1 paginăAdquisición de Datos: 6. Principio Electromagnético en SensoresCesar VeraÎncă nu există evaluări
- Sensores PasivosDocument40 paginiSensores PasivosCesar VeraÎncă nu există evaluări
- Dinámica de Sistemas MulticuerpoDocument93 paginiDinámica de Sistemas MulticuerpoRenzoÎncă nu există evaluări
- Adquisición de Datos: 6. Principio Electromagnético en SensoresDocument1 paginăAdquisición de Datos: 6. Principio Electromagnético en SensoresCesar VeraÎncă nu există evaluări
- Sensores ActivosDocument18 paginiSensores ActivosCesar VeraÎncă nu există evaluări
- 00 Intro Ducci On CpiDocument29 pagini00 Intro Ducci On CpiMB LegendsÎncă nu există evaluări
- Cinemática InversaDocument56 paginiCinemática InversaCesar VeraÎncă nu există evaluări
- Tema 7 H CuantitativaDocument37 paginiTema 7 H CuantitativaDan Chate Velasque.Încă nu există evaluări
- 50 Recetas Con Bebidas Probióticas Caseras Edición 1Document77 pagini50 Recetas Con Bebidas Probióticas Caseras Edición 1A. Yehoshua G. E.100% (1)
- GOOGLEDocument37 paginiGOOGLEGiovanni Agustin JacintoÎncă nu există evaluări
- Extensión de ArchivosDocument2 paginiExtensión de ArchivosLorena TanelliÎncă nu există evaluări
- Tratamiento Dolor Miembro FantasmaDocument8 paginiTratamiento Dolor Miembro Fantasmamanolo123456Încă nu există evaluări
- Código de Falla 2449 Control Del Actuador Del VGT - Fuera de CalibraciónDocument15 paginiCódigo de Falla 2449 Control Del Actuador Del VGT - Fuera de CalibraciónCarlos Hernandez100% (3)
- Universidad Del Azuay: Facultad de Diseño, Arquitectura Y ArteDocument112 paginiUniversidad Del Azuay: Facultad de Diseño, Arquitectura Y ArteAlejandro O. Cárdenas GarcíaÎncă nu există evaluări
- Clase 1 - Lunes - Construcciones RuralesDocument74 paginiClase 1 - Lunes - Construcciones RuralesRocio BenítezÎncă nu există evaluări
- Copia de FICHA DE SEGURIDAD GRANALLA ECOLOGICADocument3 paginiCopia de FICHA DE SEGURIDAD GRANALLA ECOLOGICAIgnacio OneilÎncă nu există evaluări
- Fase CeroDocument3 paginiFase CeroAnthony OlguinÎncă nu există evaluări
- Sociedad Anónima Abierta Articulo 260-264Document6 paginiSociedad Anónima Abierta Articulo 260-264JhosselynÎncă nu există evaluări
- Bavette - Es-Tarta de Limón y Merengue SuizoDocument4 paginiBavette - Es-Tarta de Limón y Merengue SuizoDulce RamirezÎncă nu există evaluări
- Actividades Valores de 4 To A 6 To GradoDocument22 paginiActividades Valores de 4 To A 6 To GradoNesleyda Urdaneta DíazÎncă nu există evaluări
- HOMÓNIMOSDocument3 paginiHOMÓNIMOSJack Brothers100% (1)
- Costos de sostenimiento con Split set en labores subterráneasDocument15 paginiCostos de sostenimiento con Split set en labores subterráneasAntoni Vidal RomeroÎncă nu există evaluări
- Oposición Archiveros Cortes GeneralesDocument3 paginiOposición Archiveros Cortes GeneralesluisonÎncă nu există evaluări
- PRACTICA EDUCATIVA II Programas UNEFA Licenciatura Educación Integral Octavo Semestre 8vo. SemestreDocument5 paginiPRACTICA EDUCATIVA II Programas UNEFA Licenciatura Educación Integral Octavo Semestre 8vo. SemestreJhony PradoÎncă nu există evaluări
- Análisis de La Obra El Lazarillo de TormesDocument38 paginiAnálisis de La Obra El Lazarillo de TormesvimrÎncă nu există evaluări
- Escuela de Política y GobiernoDocument6 paginiEscuela de Política y GobiernoMónica De la Vega CarreghaÎncă nu există evaluări
- Generalidades de Los Pulmones y ToraxDocument7 paginiGeneralidades de Los Pulmones y ToraxXitlalyEsparzaÎncă nu există evaluări
- Historia Sobre El Árbol de NavidadDocument3 paginiHistoria Sobre El Árbol de NavidadJulio César Fernández MenéndezÎncă nu există evaluări
- Actividad Estructura de La Industria Semana 8Document6 paginiActividad Estructura de La Industria Semana 8Yobana Romero100% (1)
- Kant, Immanuel - Introducción A La Crítica Del Juicio.Document60 paginiKant, Immanuel - Introducción A La Crítica Del Juicio.Sonia RangelÎncă nu există evaluări
- El Viaje ImposibleDocument52 paginiEl Viaje ImposibleJosé Gregorio González MárquezÎncă nu există evaluări
- Auditoría patrimonio Distribuidora AlimentosDocument88 paginiAuditoría patrimonio Distribuidora AlimentosMendoza ElmerÎncă nu există evaluări
- La Migración y Desintegración Familiar - Grupo 2Document16 paginiLa Migración y Desintegración Familiar - Grupo 2Santiago MotiñoÎncă nu există evaluări
- Proyecto Warmi OkDocument9 paginiProyecto Warmi OkLisseth Marisol Navarro salcedoÎncă nu există evaluări
- Identifica Los Hormigones de Una Obra de Construcción en Función de LaDocument6 paginiIdentifica Los Hormigones de Una Obra de Construcción en Función de LaFranco IgnacioÎncă nu există evaluări
- Guía MusescoreDocument259 paginiGuía MusescoreDiego Sebastián García100% (1)
- Caso clínico de insuficiencia renal crónica en caninoDocument21 paginiCaso clínico de insuficiencia renal crónica en caninoJania PerezÎncă nu există evaluări