S-ar putea să vă placă și
- A New Chaotic Key-Based Design For Image Encryption and DecryptionDocument4 paginiA New Chaotic Key-Based Design For Image Encryption and Decryptionart101988Încă nu există evaluări
- Study On Visual CryptographyDocument11 paginiStudy On Visual CryptographyChandan KumarÎncă nu există evaluări
- A Block Cipher Having A Key On One Side of The Plain Text Matrix and Its Inverse On The Other SideDocument4 paginiA Block Cipher Having A Key On One Side of The Plain Text Matrix and Its Inverse On The Other SideSingamaneni AshokkumarÎncă nu există evaluări
- A Modified Hill Cipher Involving Permutation, Iteration and The Key in A Specified PositionDocument6 paginiA Modified Hill Cipher Involving Permutation, Iteration and The Key in A Specified PositionIJCNSVol2NO10Încă nu există evaluări
- Đề Tài 1 an Image Encryption Scheme Based on the 3D Chaotic MapDocument8 paginiĐề Tài 1 an Image Encryption Scheme Based on the 3D Chaotic MapViệt VđÎncă nu există evaluări
- Chaos Image Encryption Using Pixel ShufflingDocument11 paginiChaos Image Encryption Using Pixel ShufflingCS & ITÎncă nu există evaluări
- OAJIS - 14 - 1153 Yosua Alberth SirDocument6 paginiOAJIS - 14 - 1153 Yosua Alberth Siryosua alberth sirÎncă nu există evaluări
- A Novel Fast Image Encryption Scheme Based On 3D Chaotic Baker MapsDocument12 paginiA Novel Fast Image Encryption Scheme Based On 3D Chaotic Baker MapsDavid SmithÎncă nu există evaluări
- Visual Cryptographic Algorithm With Shared Data: Gazal Sahai T.S.LambaDocument5 paginiVisual Cryptographic Algorithm With Shared Data: Gazal Sahai T.S.LambaHari RamÎncă nu există evaluări
- Image Algebra Techniques For Binary Image Component Labeling With Local OperatorsDocument23 paginiImage Algebra Techniques For Binary Image Component Labeling With Local Operatorsmanumini_0411Încă nu există evaluări
- Chaos-Based Image Encryption AlgorithmDocument6 paginiChaos-Based Image Encryption AlgorithmMangata AcaronarÎncă nu există evaluări
- A Robust and Efficient Scheme For Image Encryption-DecryptionDocument5 paginiA Robust and Efficient Scheme For Image Encryption-DecryptionInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Cryptography of A Gray Level Image Using A Modified Hill CipherDocument4 paginiCryptography of A Gray Level Image Using A Modified Hill Ciphervol2no6Încă nu există evaluări
- DCT From NptelDocument17 paginiDCT From NptelFarooq BhatÎncă nu există evaluări
- Stefanica 2019 - VolatilityDocument29 paginiStefanica 2019 - VolatilitypukkapadÎncă nu există evaluări
- Min ImageDocument9 paginiMin ImageRam Charan KonidelaÎncă nu există evaluări
- Block Ciphers: 3.1 What Is A Block Cipher?Document19 paginiBlock Ciphers: 3.1 What Is A Block Cipher?hdl_dcvÎncă nu există evaluări
- Extended K-Map For Minimizing Multiple Output Logic CircuitsDocument8 paginiExtended K-Map For Minimizing Multiple Output Logic CircuitsAnonymous e4UpOQEPÎncă nu există evaluări
- Need To ReadDocument14 paginiNeed To Readdogewow000Încă nu există evaluări
- Cryptography Using Chaotic Neural Network Based On Image ProcessingDocument6 paginiCryptography Using Chaotic Neural Network Based On Image Processingwaqas tahirÎncă nu există evaluări
- I Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7Document6 paginiI Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7International Journal of computational Engineering research (IJCER)Încă nu există evaluări
- A Survey of The Elliptic Curve Integrated Encryption Scheme: January 2010Document8 paginiA Survey of The Elliptic Curve Integrated Encryption Scheme: January 2010Dhafin KawakibiÎncă nu există evaluări
- Image Encryption Using Chaos and Block Cipher: The Research Is Financed by Cryptography Research Center (CRC)Document14 paginiImage Encryption Using Chaos and Block Cipher: The Research Is Financed by Cryptography Research Center (CRC)Ada ZahariaÎncă nu există evaluări
- Centrum Voor Wiskunde en Informatica: INS-R0012 May 31, 2000Document38 paginiCentrum Voor Wiskunde en Informatica: INS-R0012 May 31, 2000mriley@gmail.comÎncă nu există evaluări
- 10 1 1 107 2931 PDFDocument13 pagini10 1 1 107 2931 PDFemspacet139Încă nu există evaluări
- Image Encryption Using Advanced Hill Cipher AlgorithmDocument5 paginiImage Encryption Using Advanced Hill Cipher Algorithmdurgadivya1234Încă nu există evaluări
- Report 1Document8 paginiReport 1Mohamad HamzaÎncă nu există evaluări
- Learn Lab3Document12 paginiLearn Lab3Andika Bayu AjiÎncă nu există evaluări
- Categorical CriptographyDocument17 paginiCategorical CriptographyMatteo GiorgiÎncă nu există evaluări
- A New Algorithm of Encryption and Decryption of ImDocument6 paginiA New Algorithm of Encryption and Decryption of ImShamsher AlamÎncă nu există evaluări
- Clustering: CMPUT 466/551 Nilanjan RayDocument34 paginiClustering: CMPUT 466/551 Nilanjan RayRicha JainÎncă nu există evaluări
- ElGamal - A Public Key Cryptosystem and A Signature Scheme Based On Discrete Logarithms ElGamalDocument4 paginiElGamal - A Public Key Cryptosystem and A Signature Scheme Based On Discrete Logarithms ElGamalemersoncpazÎncă nu există evaluări
- Image Compression With Set Partitioning in Hierarchical Trees (Spiht)Document32 paginiImage Compression With Set Partitioning in Hierarchical Trees (Spiht)Ratna KiranÎncă nu există evaluări
- International Journal of Computational Engineering Research (IJCER)Document6 paginiInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Încă nu există evaluări
- ClusteringDocument30 paginiClusteringTrí Tuyên LụcÎncă nu există evaluări
- U-1,2,3 ImpanswersDocument17 paginiU-1,2,3 ImpanswersStatus GoodÎncă nu există evaluări
- A Security Enhanced Robust Steganography Algorithm For Data HidingDocument9 paginiA Security Enhanced Robust Steganography Algorithm For Data HidingKristen TurnerÎncă nu există evaluări
- 2107 00066Document14 pagini2107 00066kangchen weiÎncă nu există evaluări
- Time Multiplexing CNN Simulator Using RK7 (5) : R I 1, M J 1, NDocument6 paginiTime Multiplexing CNN Simulator Using RK7 (5) : R I 1, M J 1, NInternational Journal of Engineering and TechniquesÎncă nu există evaluări
- Cubical Homology in Digital ImagesDocument10 paginiCubical Homology in Digital ImagesSEP-PublisherÎncă nu există evaluări
- Fractal Image Compression of Satellite Imageries Using Range and Domain TechniqueDocument4 paginiFractal Image Compression of Satellite Imageries Using Range and Domain TechniqueIJERDÎncă nu există evaluări
- Improved ISI NakanoDocument4 paginiImproved ISI NakanoAzubiz TwiskÎncă nu există evaluări
- New Image Encryption and Compression Method Based On Independent Component AnalysisDocument6 paginiNew Image Encryption and Compression Method Based On Independent Component AnalysisEnzo CamargoÎncă nu există evaluări
- Steganography PaperDocument10 paginiSteganography PaperMihai AneiÎncă nu există evaluări
- Naor 1995Document12 paginiNaor 1995Minh TuấnÎncă nu există evaluări
- Kmeans and Adaptive K MeansDocument6 paginiKmeans and Adaptive K MeansSathish KumarÎncă nu există evaluări
- Traffic Sign Recognition With Neural Networks in TDocument7 paginiTraffic Sign Recognition With Neural Networks in Te190501006Încă nu există evaluări
- A Quasigroup Based Cryptographic System: Maruti Venkat Kartik SattiDocument22 paginiA Quasigroup Based Cryptographic System: Maruti Venkat Kartik SattiAishwaryaPatelÎncă nu există evaluări
- Image Encryption With Fusion of Two Maps: Yannick Abanda, Alain Tiedeu, Guillaume KomDocument28 paginiImage Encryption With Fusion of Two Maps: Yannick Abanda, Alain Tiedeu, Guillaume KomYannick AbandaÎncă nu există evaluări
- A E C C (ECC) : Survey ON Lliptic Urve RyptographyDocument5 paginiA E C C (ECC) : Survey ON Lliptic Urve RyptographyIJASCSEÎncă nu există evaluări
- Auto-Encoder Based Data Clustering: Abstract. Linear or Non-Linear Data Transformations Are Widely UsedDocument8 paginiAuto-Encoder Based Data Clustering: Abstract. Linear or Non-Linear Data Transformations Are Widely Usedpelican2016Încă nu există evaluări
- Fast Inverse Square RootDocument8 paginiFast Inverse Square RootMaxminlevelÎncă nu există evaluări
- Elliptic Curve Cryptography On Embedded Multicore SystemsDocument6 paginiElliptic Curve Cryptography On Embedded Multicore SystemsYuri ShukhrovÎncă nu există evaluări
- Simultaneous Fusion, Compression, and Encryption of Multiple ImagesDocument7 paginiSimultaneous Fusion, Compression, and Encryption of Multiple ImagessrisairampolyÎncă nu există evaluări
- SauvolaDocument5 paginiSauvolasukhdev0887Încă nu există evaluări
- KLT PBDocument5 paginiKLT PBaishuvc1822Încă nu există evaluări
- Ractal Image Compression Using Uadtree Decomposition and Huffman CodingDocument6 paginiRactal Image Compression Using Uadtree Decomposition and Huffman CodingSylvain KamdemÎncă nu există evaluări
- Crptography Exam Questions and SolutionsDocument36 paginiCrptography Exam Questions and SolutionsRajeswari Purushotham100% (1)
- Analytical Modeling of Wireless Communication SystemsDe la EverandAnalytical Modeling of Wireless Communication SystemsÎncă nu există evaluări
- Accepted Papers PDFDocument15 paginiAccepted Papers PDFAnuj MehtaÎncă nu există evaluări
- IOt hh225565Document6 paginiIOt hh225565Anuj MehtaÎncă nu există evaluări
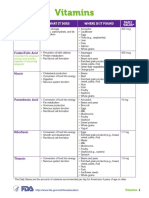
- Vitamin and Mineral Chart PDFDocument5 paginiVitamin and Mineral Chart PDFHrithik Sai TummalaÎncă nu există evaluări
- IOt hh225565Document6 paginiIOt hh225565Anuj MehtaÎncă nu există evaluări
- Physics Investigatory Project Abhishek Class Xii PDFDocument19 paginiPhysics Investigatory Project Abhishek Class Xii PDFRahulÎncă nu există evaluări
- Ashwath Thesis PDFDocument90 paginiAshwath Thesis PDFAnuj MehtaÎncă nu există evaluări
- 2019 PDFDocument1 pagină2019 PDFAnuj MehtaÎncă nu există evaluări
- TU Dresden ApplicationDocument4 paginiTU Dresden ApplicationAnuj MehtaÎncă nu există evaluări
- Cosine-Transform-Based Chaotic System For Image EncryptionDocument17 paginiCosine-Transform-Based Chaotic System For Image EncryptionAnuj MehtaÎncă nu există evaluări
- Syllabus German f3 5Document111 paginiSyllabus German f3 5Shiva prasadÎncă nu există evaluări
- TU Dresden ApplicationDocument4 paginiTU Dresden ApplicationAnuj MehtaÎncă nu există evaluări
- Image EncryptionDocument11 paginiImage EncryptionAnuj MehtaÎncă nu există evaluări
- Group CommDocument72 paginiGroup CommAnuj MehtaÎncă nu există evaluări
- R Crypt PackageDocument17 paginiR Crypt PackageAnuj MehtaÎncă nu există evaluări
- Agents: Agent Environment Sensors ActuatorsDocument20 paginiAgents: Agent Environment Sensors ActuatorsAnuj MehtaÎncă nu există evaluări
- Simple File Transfer System Using GUI and Socket Programming For Window Operating SystemDocument5 paginiSimple File Transfer System Using GUI and Socket Programming For Window Operating SystemNIKHILPRASAD THAKURÎncă nu există evaluări
- Lecture1 PDFDocument39 paginiLecture1 PDFRonildo OliveiraÎncă nu există evaluări
- Chaotic Image EncryptionDocument11 paginiChaotic Image EncryptionAnuj MehtaÎncă nu există evaluări
- Antenna Unit-12018-02-25 19 - 36 - 06Document37 paginiAntenna Unit-12018-02-25 19 - 36 - 06Anuj MehtaÎncă nu există evaluări
- An Image Encryption and Decryption Using Chaos AlgorithmDocument6 paginiAn Image Encryption and Decryption Using Chaos AlgorithmIOSRjournalÎncă nu există evaluări
- An Image Encryption and Decryption Using Chaos AlgorithmDocument6 paginiAn Image Encryption and Decryption Using Chaos AlgorithmIOSRjournalÎncă nu există evaluări
- Cse Vi Compiler Design (10cs63) NotesDocument148 paginiCse Vi Compiler Design (10cs63) NotesChethan KSwamyÎncă nu există evaluări
- Image Encryption Using Chaotic Theory and SHA-256: First Progress PresentationDocument6 paginiImage Encryption Using Chaotic Theory and SHA-256: First Progress PresentationAnuj MehtaÎncă nu există evaluări
- HhiDocument5 paginiHhiAnuj MehtaÎncă nu există evaluări
- StockDocument17 paginiStockAnuj MehtaÎncă nu există evaluări
- What Are The Features of Effective Writing?: Conventions, and Style. Thesis FocusDocument1 paginăWhat Are The Features of Effective Writing?: Conventions, and Style. Thesis FocusAnuj MehtaÎncă nu există evaluări
- StockDocument17 paginiStockAnuj MehtaÎncă nu există evaluări
- HhiDocument5 paginiHhiAnuj MehtaÎncă nu există evaluări
- 3final Syllabus CSE 3rd Semester4,5,6,7,8Document112 pagini3final Syllabus CSE 3rd Semester4,5,6,7,8karunÎncă nu există evaluări
- Math Final Answer KeyDocument3 paginiMath Final Answer KeyVernaMae Caballero BaylocesÎncă nu există evaluări
- UNIT 7 Number System and Bases CSEC Revision TestDocument3 paginiUNIT 7 Number System and Bases CSEC Revision TestNicola NichelleÎncă nu există evaluări
- Algebra 1 EHS 2015-2016Document370 paginiAlgebra 1 EHS 2015-2016SmithMath0% (1)
- Complex NumberDocument49 paginiComplex NumberBhukya SandeepÎncă nu există evaluări
- Integration TechniquesDocument45 paginiIntegration TechniquesMustafa SHAHZADÎncă nu există evaluări
- The Stiffness (Displacement) Method Step by StepDocument32 paginiThe Stiffness (Displacement) Method Step by StepRoscii Rulez100% (2)
- Define Released Structure For The Following Indeterminate StructuresDocument8 paginiDefine Released Structure For The Following Indeterminate StructuresShaukat Ali KhanÎncă nu există evaluări
- Chapter 4 DBM 10063Document20 paginiChapter 4 DBM 10063LimitverseÎncă nu există evaluări
- ConditionalDocument5 paginiConditionalkomal sitaÎncă nu există evaluări
- Sam6c Tab6c-2Document6 paginiSam6c Tab6c-2Beloved DhinaÎncă nu există evaluări
- Mathematics: Hwa Chong Institution 2020 Jc2 Block Test Higher 2Document30 paginiMathematics: Hwa Chong Institution 2020 Jc2 Block Test Higher 2toh tim lamÎncă nu există evaluări
- MAT260 - Numerical Analysis - Cheat Sheet: PreliminariesDocument2 paginiMAT260 - Numerical Analysis - Cheat Sheet: PreliminariesWail RimoucheÎncă nu există evaluări
- MAT 1332 Final Exam Version ADocument18 paginiMAT 1332 Final Exam Version AGülhan ÇıldırÎncă nu există evaluări
- Olevel Additional Mathematics Revision Notes by Fahmeed RajputDocument37 paginiOlevel Additional Mathematics Revision Notes by Fahmeed RajputTanishq Desai IX100% (1)
- 211 Sample ChapterDocument46 pagini211 Sample ChapterHuarcaya Nina JhonÎncă nu există evaluări
- Advanced Data Structure IT-411 Lab QuestionsDocument7 paginiAdvanced Data Structure IT-411 Lab QuestionsGaurav AroraÎncă nu există evaluări
- A Literature Survey of Optimal Power Flow Problems in Electrical Market ContextDocument6 paginiA Literature Survey of Optimal Power Flow Problems in Electrical Market ContextzeriguiÎncă nu există evaluări
- Seismic Inversion by Newtonian Machine Learning: Yuqing Chen and Gerard T. SchusterDocument16 paginiSeismic Inversion by Newtonian Machine Learning: Yuqing Chen and Gerard T. SchusterAlÎncă nu există evaluări
- 07 RegularizationDocument7 pagini07 RegularizationJuan Salvador Sánchez BonnínÎncă nu există evaluări
- Two-Step Equations More Practice 2Document14 paginiTwo-Step Equations More Practice 2Joh TayagÎncă nu există evaluări
- Math11 GenMath Q1Wk4-A-finalDocument2 paginiMath11 GenMath Q1Wk4-A-finalCynthia LiaresÎncă nu există evaluări
- Application of Derivatives - JEE (Main) - 2024Document77 paginiApplication of Derivatives - JEE (Main) - 2024Ritheesh NagarajanÎncă nu există evaluări
- Abstract Algebra - Wikipedia, The Free EncyclopediaDocument5 paginiAbstract Algebra - Wikipedia, The Free EncyclopediastaldÎncă nu există evaluări
- Sistema. Markov Chain - Anton, Rorres - 10.4 (Intro) (Solucao de Sistema)Document10 paginiSistema. Markov Chain - Anton, Rorres - 10.4 (Intro) (Solucao de Sistema)Diego SalazarÎncă nu există evaluări
- Topological Vector SpacesDocument5 paginiTopological Vector SpacestestÎncă nu există evaluări
- Be10105-B IcpsDocument2 paginiBe10105-B IcpsbinzbinzÎncă nu există evaluări
- System EquationsDocument4 paginiSystem EquationsEva NatashaÎncă nu există evaluări
- Singapore Mathematical Olympiads (2010)Document64 paginiSingapore Mathematical Olympiads (2010)SMS_SMO75% (4)
- Week # 01Document19 paginiWeek # 01muhammad umairÎncă nu există evaluări
- Homogeneus CoordinatesDocument27 paginiHomogeneus Coordinatesvinay kumarÎncă nu există evaluări