S-ar putea să vă placă și
- Restricted Earth Fault Application GuideDocument12 paginiRestricted Earth Fault Application GuidementongÎncă nu există evaluări
- Lec 2 CT POLARITY WHY CT STAR POINT IS ALWAYS FORMED TOWARDS PROTECTED OBJECT SIDE PART-2Document4 paginiLec 2 CT POLARITY WHY CT STAR POINT IS ALWAYS FORMED TOWARDS PROTECTED OBJECT SIDE PART-2TamjidÎncă nu există evaluări
- Schneider EM RelaysDocument16 paginiSchneider EM RelaysMuneer MPÎncă nu există evaluări
- Relay Terst System Freja 300Document10 paginiRelay Terst System Freja 300Rahil TasawarÎncă nu există evaluări
- Areva Manual Book p126-p127Document546 paginiAreva Manual Book p126-p127Vijayaganthaan VisvanatthanÎncă nu există evaluări
- Testing Numerical Transformer Diff RelaysDocument11 paginiTesting Numerical Transformer Diff Relayshizbi70% (1)
- Power Transformer ProtectionDocument27 paginiPower Transformer ProtectionrameshsmeÎncă nu există evaluări
- Over Current Protection AnnexDocument20 paginiOver Current Protection Annexryumadmax100% (1)
- ABB Transformer User Manual (Assembling & Energizing)Document30 paginiABB Transformer User Manual (Assembling & Energizing)siddsunny0% (1)
- Motor Protection Relay SPAM 150 CDocument31 paginiMotor Protection Relay SPAM 150 CJÎncă nu există evaluări
- Compact NSX 630a Lv432643Document2 paginiCompact NSX 630a Lv432643arulsethuÎncă nu există evaluări
- Generator Protection SettingsDocument4 paginiGenerator Protection Settingsmoses kakwenaÎncă nu există evaluări
- PCS-9830B X Instruction Manual en Domestic General X R1.05Document164 paginiPCS-9830B X Instruction Manual en Domestic General X R1.05Arief Sandy AnggoroÎncă nu există evaluări
- File Setting Relay 66Document4 paginiFile Setting Relay 66Nguyễn Nhật ÁnhÎncă nu există evaluări
- Protection MannualDocument121 paginiProtection Mannualgeetha_yagantiÎncă nu există evaluări
- Protection CoordinationDocument9 paginiProtection CoordinationmagdyibraheemÎncă nu există evaluări
- Iec Electrical StandardsDocument10 paginiIec Electrical StandardsSined KingÎncă nu există evaluări
- p220 Setting GuidelinesDocument21 paginip220 Setting GuidelinesKunjan Dalwadi100% (1)
- Motor data and thermal overload protection settingsDocument27 paginiMotor data and thermal overload protection settingsEmir Kamberović100% (1)
- Presentation P631+P632+P633+P634Document59 paginiPresentation P631+P632+P633+P634Leister Carneiro TheodoroÎncă nu există evaluări
- 3 Axis TB6600 CNC Driver Board Users ManualDocument10 pagini3 Axis TB6600 CNC Driver Board Users Manualalvarnal100% (2)
- Micom Thermal Overload Relay CalculationDocument4 paginiMicom Thermal Overload Relay CalculationP&I Rawat Rawat0% (1)
- Lennox Service Manual For 23SEER Inverter CODocument116 paginiLennox Service Manual For 23SEER Inverter COLuis AsfuraÎncă nu există evaluări
- Calculate IDMT Over Current Relay Setting (50 - 51) - Electrical Notes & ArticlesDocument10 paginiCalculate IDMT Over Current Relay Setting (50 - 51) - Electrical Notes & ArticlesGirish Raghavendra RaoÎncă nu există evaluări
- PCS-985GE - X - Instruction Manual - EN - Overseas General - X - R1.02 PDFDocument464 paginiPCS-985GE - X - Instruction Manual - EN - Overseas General - X - R1.02 PDFarulsethuÎncă nu există evaluări
- Generator Relay Protection Setting Calculation REV 1.0Document18 paginiGenerator Relay Protection Setting Calculation REV 1.0SreekanthMylavarapuÎncă nu există evaluări
- p345 Technical ManualDocument1 paginăp345 Technical ManualabhayambujÎncă nu există evaluări
- P 632 ManualDocument40 paginiP 632 Manualspakumaran100% (2)
- Cag 14 & Cag 34Document6 paginiCag 14 & Cag 34Arun KumarÎncă nu există evaluări
- 04.protection of 33KV Feeder.Document16 pagini04.protection of 33KV Feeder.gnpr_10106080Încă nu există evaluări
- Thermal CalculationDocument9 paginiThermal CalculationAnonymous oZdAPQdIJÎncă nu există evaluări
- Motor Protective Settings1Document22 paginiMotor Protective Settings1MaheswariÎncă nu există evaluări
- Broken Conductor ProtectionDocument2 paginiBroken Conductor ProtectionThirumalÎncă nu există evaluări
- Motor ProtectionDocument31 paginiMotor ProtectionHadrien FaryalaÎncă nu există evaluări
- Fuller-Kinyon Pump: Dry Material Line ChargerDocument6 paginiFuller-Kinyon Pump: Dry Material Line ChargerRushdan ZaimÎncă nu există evaluări
- Protective Relaying Testing ST6Document6 paginiProtective Relaying Testing ST6Darwin MesaÎncă nu există evaluări
- Calculating generator fault current and CT knee point voltage for differential protectionDocument3 paginiCalculating generator fault current and CT knee point voltage for differential protectionvenkateshbitraÎncă nu există evaluări
- Configure autotransformer tertiary windingDocument2 paginiConfigure autotransformer tertiary windingaocalayÎncă nu există evaluări
- Motor Protection Settings GuideDocument20 paginiMotor Protection Settings Guideashumanu427Încă nu există evaluări
- MOTOR PROTECTION RELAYdocxDocument7 paginiMOTOR PROTECTION RELAYdocxPandrayar Maruthu100% (2)
- Hardware Manual ACS800-02 Drives (45 To 500 KW) ACS800-U2 Drives (60 To 600 HP)Document128 paginiHardware Manual ACS800-02 Drives (45 To 500 KW) ACS800-U2 Drives (60 To 600 HP)Mahmoud HassanÎncă nu există evaluări
- RCS-978E Transformer Protection Instruction Manual (EN - YJBH1002.0091.1101)Document210 paginiRCS-978E Transformer Protection Instruction Manual (EN - YJBH1002.0091.1101)SrinivasanÎncă nu există evaluări
- Setings Calculation New HavenDocument6 paginiSetings Calculation New HavenWilfred AsonmwonririÎncă nu există evaluări
- Data Bulletin SEPAM™ 49RMS Application Note: Protection For Motor Applications Class Number 3000Document10 paginiData Bulletin SEPAM™ 49RMS Application Note: Protection For Motor Applications Class Number 3000Ryan Anthony UmaliÎncă nu există evaluări
- TOTUS TTM monitoring device configuration guideDocument79 paginiTOTUS TTM monitoring device configuration guidearulsethu67% (3)
- Transformer OverFluxDocument3 paginiTransformer OverFluxNeelakandan MasilamaniÎncă nu există evaluări
- Stub protection for one and a half circuit breaker schemeDocument2 paginiStub protection for one and a half circuit breaker schemesamlash100% (1)
- One Case Study-Practical Protection Engineering BasicDocument4 paginiOne Case Study-Practical Protection Engineering BasicarsalanhamidÎncă nu există evaluări
- R8075e MCVG61Document32 paginiR8075e MCVG61Rinda_Rayna100% (2)
- PSM641UX TechnicalManua-V1.03Document128 paginiPSM641UX TechnicalManua-V1.03arulsethuÎncă nu există evaluări
- ALSTOM Reverse Power Relay CCUM 21 High ResDocument4 paginiALSTOM Reverse Power Relay CCUM 21 High ResArun KumarÎncă nu există evaluări
- Mm10 ManualDocument9 paginiMm10 ManualpandurangaÎncă nu există evaluări
- Cag 1737Document5 paginiCag 1737Anonymous HuHbq4OR100% (2)
- VTXDocument6 paginiVTXHari Krishna.MÎncă nu există evaluări
- Ict-1 Test ReportDocument41 paginiIct-1 Test ReportSuresh Chandra PadhyÎncă nu există evaluări
- Class X Current TransformerDocument4 paginiClass X Current TransformerVijay Pitchaiah0% (1)
- Upf MythDocument3 paginiUpf MythgurbachansainiÎncă nu există evaluări
- DC Time Constant EstimationDocument6 paginiDC Time Constant Estimationrasheed313Încă nu există evaluări
- High Speed Tripping Relays VAJH, VAJS and VAJHMDocument6 paginiHigh Speed Tripping Relays VAJH, VAJS and VAJHMvikash sharmaÎncă nu există evaluări
- Alstom CDAG Relay ManualDocument5 paginiAlstom CDAG Relay Manualkeith_home100% (1)
- Micom p94xDocument446 paginiMicom p94xkjfensÎncă nu există evaluări
- JVS Manual JRP 011Document12 paginiJVS Manual JRP 011Tamilventhan_sÎncă nu există evaluări
- REF 601 Ver 2.2 (Version Ultima)Document90 paginiREF 601 Ver 2.2 (Version Ultima)Paúl Randy Herrera HerenciaÎncă nu există evaluări
- Calculate Idmt PDFDocument6 paginiCalculate Idmt PDFShuvan MabuÎncă nu există evaluări
- R6134E Setting Guide OPNDocument5 paginiR6134E Setting Guide OPNrajinipre-1Încă nu există evaluări
- R6121e Mopn 0102Document14 paginiR6121e Mopn 0102zain shafiqÎncă nu există evaluări
- Rho3 Section5 Application GuideDocument8 paginiRho3 Section5 Application Guidertsr1990Încă nu există evaluări
- P225 PDFDocument12 paginiP225 PDFdave chaudhuryÎncă nu există evaluări
- Data Frame HeaterDocument1 paginăData Frame HeaterTaufiq HidayatÎncă nu există evaluări
- Do Not Trade Based On These Numbers OnlyDocument2 paginiDo Not Trade Based On These Numbers OnlyarulsethuÎncă nu există evaluări
- ACS510 01 UM RevD EN PDFDocument247 paginiACS510 01 UM RevD EN PDFJoaquim MartinsÎncă nu există evaluări
- ACS510 01 UM RevD EN PDFDocument247 paginiACS510 01 UM RevD EN PDFJoaquim MartinsÎncă nu există evaluări
- Alstom Technical FlyerDocument2 paginiAlstom Technical Flyerram_kisna007Încă nu există evaluări
- CO2 DCS Room DE-HUMIDIFIER Unit Replacement JHADocument1 paginăCO2 DCS Room DE-HUMIDIFIER Unit Replacement JHAarulsethuÎncă nu există evaluări
- ARC - JHA No. 2016-0053 - Lighting Defects - NISODocument1 paginăARC - JHA No. 2016-0053 - Lighting Defects - NISOarulsethuÎncă nu există evaluări
- Alstom Technical FlyerDocument2 paginiAlstom Technical Flyerram_kisna007Încă nu există evaluări
- Alstom Technical FlyerDocument2 paginiAlstom Technical Flyerram_kisna007Încă nu există evaluări
- Reluctance MotorDocument24 paginiReluctance Motorpraveenpv7100% (1)
- GCV & SRV ServovalveDocument11 paginiGCV & SRV ServovalvechdiÎncă nu există evaluări
- Altivar® 21Document52 paginiAltivar® 21Budy AndikaÎncă nu există evaluări
- STEPPER MOTOR DRIVER SEMICONDUCTOR TECHNICAL DATADocument7 paginiSTEPPER MOTOR DRIVER SEMICONDUCTOR TECHNICAL DATAGalo CárdenasÎncă nu există evaluări
- Observation of Force and Torque On A Current Loop Using A Simplified Electric MotorDocument3 paginiObservation of Force and Torque On A Current Loop Using A Simplified Electric Motorfrances leana capellan100% (2)
- WEG-ssw06 2 PDFDocument70 paginiWEG-ssw06 2 PDFAlexandre RodriguesÎncă nu există evaluări
- Economic Operation of Power SystemsDocument45 paginiEconomic Operation of Power SystemsDogbey BrightÎncă nu există evaluări
- Recent Developments in The Vehicle Steer-by-Wire System: Ieee Transactions On Transportation Electrification 1Document10 paginiRecent Developments in The Vehicle Steer-by-Wire System: Ieee Transactions On Transportation Electrification 1Fresy NugrohoÎncă nu există evaluări
- Brook MotorsDocument16 paginiBrook Motorsreza100% (1)
- Analysis of Multi-Phase PM MachinesDocument6 paginiAnalysis of Multi-Phase PM MachinesRinel BukhariÎncă nu există evaluări
- Hydraulic & Pneumatic Actuators-Product Catalogues-EnglishDocument4 paginiHydraulic & Pneumatic Actuators-Product Catalogues-Englishcosmin75Încă nu există evaluări
- Steering System: N35ZDR, N45ZR (C264) N30ZDR, N35-40ZR (D470) N30ZDRS, N35-40ZRS (A265)Document56 paginiSteering System: N35ZDR, N45ZR (C264) N30ZDR, N35-40ZR (D470) N30ZDRS, N35-40ZRS (A265)Linde Forklift100% (1)
- SBP Series With ICD200 UM 2013-05 R200Document18 paginiSBP Series With ICD200 UM 2013-05 R200Jose LunaÎncă nu există evaluări
- Caracteristicas Motor2Document4 paginiCaracteristicas Motor2OmarPDomInguezÎncă nu există evaluări
- Universal Motor: Presented byDocument12 paginiUniversal Motor: Presented byAkash NiwalÎncă nu există evaluări
- Kemtech Twin Lap 50 Bench Lapping MachineDocument4 paginiKemtech Twin Lap 50 Bench Lapping MachineGeovany MalignoÎncă nu există evaluări
- PhysicsDocument3 paginiPhysicsranaateeqÎncă nu există evaluări
- Efficiency Maps of Electrical MachinesDocument9 paginiEfficiency Maps of Electrical Machinesmdht1556Încă nu există evaluări
- NEWKer 302 Manual V3.2Document49 paginiNEWKer 302 Manual V3.2ivanreyÎncă nu există evaluări
- Internship Report Final 66Document17 paginiInternship Report Final 66RaghuÎncă nu există evaluări
- GSP160, GSP300 Sub-Prime® Electric Submersible Dewatering PumpsDocument2 paginiGSP160, GSP300 Sub-Prime® Electric Submersible Dewatering PumpsAbcehmu EgiÎncă nu există evaluări
- Alternador y Bomba de VacioDocument9 paginiAlternador y Bomba de Vaciocarlos Gutierrez De La HozÎncă nu există evaluări
- Working and Applicaions of Esc (Electronic Speed Controller)Document24 paginiWorking and Applicaions of Esc (Electronic Speed Controller)Navin KhatriÎncă nu există evaluări
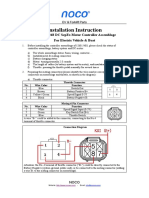
- Installation Instruction: Curtis 1268 DC Sepex Motor Controller Assemblage For Electric Vehicle & BoatDocument3 paginiInstallation Instruction: Curtis 1268 DC Sepex Motor Controller Assemblage For Electric Vehicle & BoatCesar Ruben SosaÎncă nu există evaluări
- Unit - 2 - Starter Drive MechanismsDocument34 paginiUnit - 2 - Starter Drive MechanismsRajesh KumarÎncă nu există evaluări