S-ar putea să vă placă și
- Data Structure and Algorithms Using C A Practical Implementation 1nbsped 1119750547 9781119750543 CompressDocument410 paginiData Structure and Algorithms Using C A Practical Implementation 1nbsped 1119750547 9781119750543 CompressJosua Alfonso Jr.100% (1)
- Test Bank for Precalculus: Functions & GraphsDe la EverandTest Bank for Precalculus: Functions & GraphsEvaluare: 5 din 5 stele5/5 (1)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsDe la EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsEvaluare: 5 din 5 stele5/5 (1)
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankDe la EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankÎncă nu există evaluări
- Data Structures Multiple Choice QuestionsDocument6 paginiData Structures Multiple Choice QuestionsGm Lakshman100% (1)
- Data Structures Algorithms Multiple Choice Questions MCQsDocument16 paginiData Structures Algorithms Multiple Choice Questions MCQssibanandarmsÎncă nu există evaluări
- Algo PPTDocument146 paginiAlgo PPTAnjani KumariÎncă nu există evaluări
- Complexity Lec#3Document25 paginiComplexity Lec#3krishanÎncă nu există evaluări
- Getting Started: Sun-Yuan HsiehDocument30 paginiGetting Started: Sun-Yuan Hsieh陳柏志Încă nu există evaluări
- Analyzing Algorithms: CS-EE-310 Algorithms AnalysisDocument41 paginiAnalyzing Algorithms: CS-EE-310 Algorithms AnalysisStevenÎncă nu există evaluări
- Unit-1 DAA - NotesDocument25 paginiUnit-1 DAA - Notesshivam02774Încă nu există evaluări
- Introduction To Algorithm Design and Analysis: A, A,, A A ', A ',, A ' Such That A ' A ' ADocument21 paginiIntroduction To Algorithm Design and Analysis: A, A,, A A ', A ',, A ' Such That A ' A ' ARohit ChaudharyÎncă nu există evaluări
- Unit 1 Daa Notes Daa Unit 1 NoteDocument26 paginiUnit 1 Daa Notes Daa Unit 1 NoteJayanti GuptaÎncă nu există evaluări
- 01 CS251 Ch2 Getting StartedDocument20 pagini01 CS251 Ch2 Getting StartedAhmad AlarabyÎncă nu există evaluări
- 2015 Daa-Sol Mid-RegularDocument12 pagini2015 Daa-Sol Mid-Regular062NISHANT KUMARÎncă nu există evaluări
- Lab ManualDocument20 paginiLab ManualMuthukrishnan NÎncă nu există evaluări
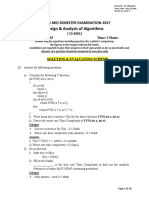
- 2017 Mid-Daa SolutionDocument16 pagini2017 Mid-Daa SolutionDebanik DebnathÎncă nu există evaluări
- Lecture04 v02Document29 paginiLecture04 v02Mykhailo ShubinÎncă nu există evaluări
- Unit 1 Daa Notes Daa Unit 1 NoteDocument26 paginiUnit 1 Daa Notes Daa Unit 1 NoteSaurabh GuptaÎncă nu există evaluări
- Ca 1Document24 paginiCa 1charukaÎncă nu există evaluări
- Solu 4Document44 paginiSolu 4Eric FansiÎncă nu există evaluări
- 2018 Daa-Sol Mid-Regular (Cse) PDFDocument11 pagini2018 Daa-Sol Mid-Regular (Cse) PDFDebanik DebnathÎncă nu există evaluări
- Unit-1 DAA Notes - Daa Unit 1 Note Unit-1 DAA Notes - Daa Unit 1 NoteDocument26 paginiUnit-1 DAA Notes - Daa Unit 1 Note Unit-1 DAA Notes - Daa Unit 1 NoteHarsh PandeyÎncă nu există evaluări
- Btech Degree Examination, May2014 Cs010 601 Design and Analysis of Algorithms Answer Key Part-A 1Document14 paginiBtech Degree Examination, May2014 Cs010 601 Design and Analysis of Algorithms Answer Key Part-A 1kalaraijuÎncă nu există evaluări
- DAA Introduction WMDocument34 paginiDAA Introduction WMD07Vaishnavi ShindeCEÎncă nu există evaluări
- 1-Divide and Conquer AlgorithmsDocument99 pagini1-Divide and Conquer AlgorithmsShivani SrivastavaÎncă nu există evaluări
- Data Structures: Algorithm AnalysisDocument26 paginiData Structures: Algorithm AnalysisMustafa AdilÎncă nu există evaluări
- CMPSC 465 Assignment 2Document11 paginiCMPSC 465 Assignment 2sashwatÎncă nu există evaluări
- CS203 Week6Document7 paginiCS203 Week6Rajan KumarÎncă nu există evaluări
- Algorithms - : SolutionsDocument11 paginiAlgorithms - : SolutionsDagnachewÎncă nu există evaluări
- Data Structures and Algorithms Lecture Notes: Introduction, Definitions, Terminology, Brassard Chap. 2Document36 paginiData Structures and Algorithms Lecture Notes: Introduction, Definitions, Terminology, Brassard Chap. 2Phạm Gia DũngÎncă nu există evaluări
- Analysis of Running Time of Algorithms (Best, Average and Worst Cases)Document17 paginiAnalysis of Running Time of Algorithms (Best, Average and Worst Cases)Fizza IrfanÎncă nu există evaluări
- Complexity AnalysisDocument21 paginiComplexity AnalysisAmmar JagadhitaÎncă nu există evaluări
- Lec3 Algo2021SpringDocument13 paginiLec3 Algo2021SpringDavid Esteban Martin AcostaÎncă nu există evaluări
- cs330 10 Notes PDFDocument204 paginics330 10 Notes PDFasifmechengrÎncă nu există evaluări
- 2 Program ComplexitiesDocument37 pagini2 Program ComplexitiesDickson WongÎncă nu există evaluări
- Design and Analysis of ALGORITHM (Week 2) : Our Machine Model: AssumptionsDocument9 paginiDesign and Analysis of ALGORITHM (Week 2) : Our Machine Model: AssumptionsDende Viana ArumÎncă nu există evaluări
- Michelle Bodnar, Andrew Lohr February 5, 2018Document20 paginiMichelle Bodnar, Andrew Lohr February 5, 2018akshat sinhaÎncă nu există evaluări
- What Is An Algorithm?: Example: SortingDocument18 paginiWhat Is An Algorithm?: Example: SortingsriniefsÎncă nu există evaluări
- What Is An Algorithm?: (And How Do We Analyze One?)Document29 paginiWhat Is An Algorithm?: (And How Do We Analyze One?)Rohit ChaudharyÎncă nu există evaluări
- Algorithm AnalysisDocument37 paginiAlgorithm AnalysisBadnaam RajaÎncă nu există evaluări
- Mca 403Document85 paginiMca 403Mahesh PandeÎncă nu există evaluări
- Unit I Divide ConquerDocument75 paginiUnit I Divide Conquermayuri moreÎncă nu există evaluări
- Lecture 2 Time ComplexityDocument17 paginiLecture 2 Time ComplexityKaheng ChongÎncă nu există evaluări
- Lecture Week 4: Algorithm ComplexityDocument34 paginiLecture Week 4: Algorithm ComplexityMaham uroojÎncă nu există evaluări
- Lec 2Document27 paginiLec 2hashim alshrfiÎncă nu există evaluări
- QuestionsDocument31 paginiQuestionsHithaishi BathuluriÎncă nu există evaluări
- COL 106: Data-Structures: Course Coordinator: Amit KumarDocument37 paginiCOL 106: Data-Structures: Course Coordinator: Amit Kumarsuresh bishnoiÎncă nu există evaluări
- 05 CSE225 Analysis of AlgorithmsDocument32 pagini05 CSE225 Analysis of AlgorithmsZahin Zami OrkoÎncă nu există evaluări
- Chapter1 FundamentalsDocument22 paginiChapter1 FundamentalsNgọc Nguyễn QuýÎncă nu există evaluări
- Midterm Sol 1 PDFDocument6 paginiMidterm Sol 1 PDFjumpman006Încă nu există evaluări
- Analysis of Algorithm MU Semester 4 AssignmentDocument8 paginiAnalysis of Algorithm MU Semester 4 AssignmentBestly SetupsÎncă nu există evaluări
- 6 Aoa - Xf17f&a.docx: P. 1 Of, NassarDocument11 pagini6 Aoa - Xf17f&a.docx: P. 1 Of, NassarAhmed AbdulwahabÎncă nu există evaluări
- Michelle Bodnar, Andrew Lohr September 17, 2017Document12 paginiMichelle Bodnar, Andrew Lohr September 17, 2017Mm AAÎncă nu există evaluări
- Complexity 2Document37 paginiComplexity 2Rahul ShramaÎncă nu există evaluări
- The Fundamentals: Algorithms The IntegersDocument55 paginiThe Fundamentals: Algorithms The Integersnguyên trần minhÎncă nu există evaluări
- 02 AlgoanalysisDocument36 pagini02 Algoanalysisnttqn203Încă nu există evaluări
- Running Time ( 1.1) : W W W WDocument5 paginiRunning Time ( 1.1) : W W W Wronnny11Încă nu există evaluări
- Lecture02 v03Document17 paginiLecture02 v03Mykhailo ShubinÎncă nu există evaluări
- CS-2012 (Daa) - CS Mid Sept 2023Document15 paginiCS-2012 (Daa) - CS Mid Sept 2023rajeevkgrd20Încă nu există evaluări
- 2018 Daa-Sol Mid-Regular (Ecs)Document9 pagini2018 Daa-Sol Mid-Regular (Ecs)062NISHANT KUMARÎncă nu există evaluări
- Michelle Bodnar, Andrew Lohr April 12, 2016Document12 paginiMichelle Bodnar, Andrew Lohr April 12, 2016Prakash AsÎncă nu există evaluări
- Ada 1Document11 paginiAda 1kavithaangappanÎncă nu există evaluări
- Data Structures MCQDocument19 paginiData Structures MCQAshwani Vajpai100% (1)
- Splay TreeDocument61 paginiSplay TreeganeshÎncă nu există evaluări
- Ahmedabad Institute of Technology: CE & IT DepartmentDocument4 paginiAhmedabad Institute of Technology: CE & IT DepartmentTrishalaÎncă nu există evaluări
- SE 433/333 Software Testing & Quality AssuranceDocument101 paginiSE 433/333 Software Testing & Quality AssuranceMelvin JacobÎncă nu există evaluări
- Clrs Solution CollectionDocument217 paginiClrs Solution CollectionbrzeczkaÎncă nu există evaluări
- Design & Analysis of Algorithms: Anwar GhaniDocument43 paginiDesign & Analysis of Algorithms: Anwar GhaniMahmood SyedÎncă nu există evaluări
- Ocw CS (Ece) 301 PDFDocument174 paginiOcw CS (Ece) 301 PDFBiswadip SahaÎncă nu există evaluări
- 0521135079Document620 pagini0521135079ghorghanlouÎncă nu există evaluări
- Design and Analysis of Algorithms Dr. N. Subhash Chandra: Course ObjectivesDocument137 paginiDesign and Analysis of Algorithms Dr. N. Subhash Chandra: Course ObjectivesM Madhavi Asst. Professor, CSE, VRSECÎncă nu există evaluări
- Data Structures and OverviewDocument13 paginiData Structures and Overviewsrinidhi1956Încă nu există evaluări
- AoA Important QuestionDocument3 paginiAoA Important QuestionShubham KumarÎncă nu există evaluări
- Data Structure and Algorithm AllDocument170 paginiData Structure and Algorithm Allyomif tamiruÎncă nu există evaluări
- Complexity Analysis: Data Structure and Algorithm in JavaDocument41 paginiComplexity Analysis: Data Structure and Algorithm in JavadarknesszxÎncă nu există evaluări
- Daa Ktu NotesDocument112 paginiDaa Ktu NotesAdarsh KrÎncă nu există evaluări
- AOA Module 1Document56 paginiAOA Module 1James JoseÎncă nu există evaluări
- A. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdDocument70 paginiA. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdAmro AbosaifÎncă nu există evaluări
- Unit 1Document72 paginiUnit 1Syed SulaimanÎncă nu există evaluări
- FDS - Unit 3 - MCQDocument8 paginiFDS - Unit 3 - MCQFatherÎncă nu există evaluări
- Chapter #1 Analysis of AlgorithmDocument8 paginiChapter #1 Analysis of AlgorithmUmarÎncă nu există evaluări
- Daa Unit-1: Introduction To AlgorithmsDocument16 paginiDaa Unit-1: Introduction To AlgorithmsmhghtgxdfhhjkjlÎncă nu există evaluări
- Python Notes Class Xii Cs 083Document65 paginiPython Notes Class Xii Cs 083Pranav Pratap Singh100% (3)
- Aaoa Chap 1Document47 paginiAaoa Chap 1Mansoor MehmoodÎncă nu există evaluări
- Ebook Fundamentals of Python Data Structures PDF Full Chapter PDFDocument67 paginiEbook Fundamentals of Python Data Structures PDF Full Chapter PDFmary.rainey124100% (28)
- Lecture # 1 Anayasis of AlgorithmsDocument36 paginiLecture # 1 Anayasis of AlgorithmsWaleedÎncă nu există evaluări
- Case Study (Analysis of AlgorithmDocument14 paginiCase Study (Analysis of Algorithmnimrashafiq604Încă nu există evaluări
- ADA Viva Questions Unit 1 and 2Document5 paginiADA Viva Questions Unit 1 and 2Yash PatelÎncă nu există evaluări