S-ar putea să vă placă și
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsDe la EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsÎncă nu există evaluări
- NPTEL Web Course On: ROBOTICS: Advanced Concepts and AnalysisDocument3 paginiNPTEL Web Course On: ROBOTICS: Advanced Concepts and AnalysisAnurag JaiswarÎncă nu există evaluări
- Neural Network Modeling and Identification of Dynamical SystemsDe la EverandNeural Network Modeling and Identification of Dynamical SystemsÎncă nu există evaluări
- Nptel StartDocument3 paginiNptel Startamitshukla.iitkÎncă nu există evaluări
- Telemetry & Wireless Sensor NetworkDocument10 paginiTelemetry & Wireless Sensor NetworkSwapan DasÎncă nu există evaluări
- Mechanisms: Kinematic Analysis and Applications in RoboticsDe la EverandMechanisms: Kinematic Analysis and Applications in RoboticsÎncă nu există evaluări
- A 01 Front MatterDocument3 paginiA 01 Front MatterenriqueholgadoÎncă nu există evaluări
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaDe la EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiÎncă nu există evaluări
- MEE3014 - ROBOTICS-AND-AUTOMATION - LT - 1.0 - 1 - Robotics and AutomationDocument3 paginiMEE3014 - ROBOTICS-AND-AUTOMATION - LT - 1.0 - 1 - Robotics and AutomationInzamam Ul HaqueÎncă nu există evaluări
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationDe la EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationEvaluare: 5 din 5 stele5/5 (1)
- Parallel Manipulators - Edited by Jee Hwan Ryu PDFDocument508 paginiParallel Manipulators - Edited by Jee Hwan Ryu PDFWillmans Nolberto Ticlla MostaceroÎncă nu există evaluări
- ILE 301 ME 319 RoboticsDocument2 paginiILE 301 ME 319 RoboticsZeenat KhanÎncă nu există evaluări
- 00 Robotics Lec00Document14 pagini00 Robotics Lec00Furkan KirmaciÎncă nu există evaluări
- RoboticsDocument2 paginiRoboticsSathish KumarÎncă nu există evaluări
- Bmha303l Industrial-Robotics TH 1.0 0 Bmha303lDocument3 paginiBmha303l Industrial-Robotics TH 1.0 0 Bmha303lForgot PasswordÎncă nu există evaluări
- EC368 RoboticsDocument3 paginiEC368 RoboticsBonifus Parambaloth LeenusÎncă nu există evaluări
- EC368 RoboticsDocument3 paginiEC368 RoboticsHello123Încă nu există evaluări
- EC368 RoboticsDocument3 paginiEC368 RoboticsKrishnakumar KattarakunnuÎncă nu există evaluări
- M.tech SyllabusDocument22 paginiM.tech Syllabusrajeev_kumar365Încă nu există evaluări
- Intelligence, Mcgraw-Hill International Editions. Robotics: Technology, Programming, and Applications, Mcgraw-Hill InternationalDocument3 paginiIntelligence, Mcgraw-Hill International Editions. Robotics: Technology, Programming, and Applications, Mcgraw-Hill InternationalAKSHAY KRISHNA K RÎncă nu există evaluări
- Assessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and AutomationDocument30 paginiAssessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and Automationdjadja nakamayaÎncă nu există evaluări
- Modern Robotics Offers A: Comprehensive Contemporary Approach To The Modeling and Control of Robotic MechanismsDocument3 paginiModern Robotics Offers A: Comprehensive Contemporary Approach To The Modeling and Control of Robotic Mechanismsbob jkÎncă nu există evaluări
- Robotics & AutomationDocument2 paginiRobotics & AutomationKannaneight BalaÎncă nu există evaluări
- DEN408 - DEMM011 Course Info - 2013Document2 paginiDEN408 - DEMM011 Course Info - 2013MadsonÎncă nu există evaluări
- RoboticsDocument394 paginiRoboticsPeter Nomikos100% (5)
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 paginiModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzÎncă nu există evaluări
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 paginiModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Bijay KumarÎncă nu există evaluări
- ITM424 Robotic Systems Total Contact Hours-75 Prerequisites Nil Purpose Instructional ObjectivesDocument3 paginiITM424 Robotic Systems Total Contact Hours-75 Prerequisites Nil Purpose Instructional ObjectivesBrittaney BatoÎncă nu există evaluări
- PaperDocument4 paginiPaperRebira AgaÎncă nu există evaluări
- Robotics and Artificial IntelligenceDocument3 paginiRobotics and Artificial Intelligenceraumil123Încă nu există evaluări
- ME246Document1 paginăME246gidewip486Încă nu există evaluări
- On The Mentor Arm Position Placement Problem: A Forward Kinematics AnalysisDocument7 paginiOn The Mentor Arm Position Placement Problem: A Forward Kinematics AnalysisantuankkÎncă nu există evaluări
- Me4216: Industrial Robot: Objective: For Students ToDocument4 paginiMe4216: Industrial Robot: Objective: For Students ToNguyễn SơnÎncă nu există evaluări
- Ece2008 Robotics-And-Automation Eth 2.0 40 Ece2008Document2 paginiEce2008 Robotics-And-Automation Eth 2.0 40 Ece2008Raj GaneshÎncă nu există evaluări
- Automatic Control (ME1401)Document2 paginiAutomatic Control (ME1401)Mehroos AliÎncă nu există evaluări
- ME505Document2 paginiME505Gyanesh RaoÎncă nu există evaluări
- Robotics TeachingPlan BoSE&TC KBCDocument2 paginiRobotics TeachingPlan BoSE&TC KBCvydeo100% (1)
- KOM Final 13 May 2020Document5 paginiKOM Final 13 May 2020Nilesh GhugeÎncă nu există evaluări
- MME206: Kinematics and Dynamics: Mechanism and Machine Theorys, Prentice Hall, 2013Document2 paginiMME206: Kinematics and Dynamics: Mechanism and Machine Theorys, Prentice Hall, 2013raghav dhamani100% (1)
- Robotics EngineeringDocument3 paginiRobotics Engineeringhiren_mistry55Încă nu există evaluări
- Serial and Parallel Robot Manipulators Kinematics Dynamics Control and Optimization PDFDocument468 paginiSerial and Parallel Robot Manipulators Kinematics Dynamics Control and Optimization PDFCosorAndrei-AlexandruÎncă nu există evaluări
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 paginiEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RÎncă nu există evaluări
- Bece312l Robotics-And-Automation TH 1.0 75 Bece312lDocument2 paginiBece312l Robotics-And-Automation TH 1.0 75 Bece312lViswanadh VankamamidiÎncă nu există evaluări
- M.Tech. - Industrial ElectronicsDocument6 paginiM.Tech. - Industrial ElectronicsManohar PundikalÎncă nu există evaluări
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 paginiEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komÎncă nu există evaluări
- Kinematic Modelling of A Robotic Arm Manipulator Using MATLABDocument4 paginiKinematic Modelling of A Robotic Arm Manipulator Using MATLABdavid frybergÎncă nu există evaluări
- Me6401 KomDocument128 paginiMe6401 KomThomas LafontaineÎncă nu există evaluări
- 6 Sem SyllabusDocument7 pagini6 Sem SyllabusAjinkya NawghareÎncă nu există evaluări
- Dynamic Robot BipedoDocument521 paginiDynamic Robot BipedoGerardo Alejandro Portilla Tuesta100% (1)
- RoboticsDocument7 paginiRoboticsHenokÎncă nu există evaluări
- Robot ArmsDocument272 paginiRobot ArmsJosé RamírezÎncă nu există evaluări
- M.Tech. Programme in Mechatronics, IIT PatnaDocument13 paginiM.Tech. Programme in Mechatronics, IIT PatnaNPMYS23Încă nu există evaluări
- SPPU RoboDocument2 paginiSPPU RoboShrikant YadavÎncă nu există evaluări
- Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator RobotDocument22 paginiInverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator Robotvishakha bangareÎncă nu există evaluări
- Syllabus - 3rd & 4thmechanical EngineeringDocument35 paginiSyllabus - 3rd & 4thmechanical EngineeringSalman KhanÎncă nu există evaluări
- Research Inventy: International Journal of Engineering and ScienceDocument4 paginiResearch Inventy: International Journal of Engineering and ScienceinventyÎncă nu există evaluări
- RoboticsDocument1 paginăRoboticstagoreboopathyÎncă nu există evaluări
- DEPA ZG561 Mechanism Robotics - HandoutDocument8 paginiDEPA ZG561 Mechanism Robotics - HandoutNabil InamdarÎncă nu există evaluări
- Es ZG561Document10 paginiEs ZG561Saurabh Jaiswal JassiÎncă nu există evaluări
- Design, Analysis and Kinematics of Robotic Manipulator: A Literature ReviewDocument18 paginiDesign, Analysis and Kinematics of Robotic Manipulator: A Literature ReviewkranthiÎncă nu există evaluări
- Kinematics Analysis and Workspace Calculation of A 3-DOF ManipulatorDocument10 paginiKinematics Analysis and Workspace Calculation of A 3-DOF ManipulatorkranthiÎncă nu există evaluări
- Intro Robot Kinematics 5Document25 paginiIntro Robot Kinematics 5Gnanesh PendliÎncă nu există evaluări
- Kinematics and Dynamics Analysis of A Novel Five-Degrees-Of-Freedom Hybrid RobotDocument8 paginiKinematics and Dynamics Analysis of A Novel Five-Degrees-Of-Freedom Hybrid RobotkranthiÎncă nu există evaluări
- M Array Manipulation Tips and Tricks: AtlabDocument31 paginiM Array Manipulation Tips and Tricks: AtlabberkÎncă nu există evaluări
- TheClosedFormSolutionoftheInverseKinematicsofa6 DOFRobot PDFDocument18 paginiTheClosedFormSolutionoftheInverseKinematicsofa6 DOFRobot PDFTomÎncă nu există evaluări
- ADAMS/MATLAB Co SimulationDocument6 paginiADAMS/MATLAB Co SimulationkranthiÎncă nu există evaluări
- Intro Robot Kinematics 5Document25 paginiIntro Robot Kinematics 5Gnanesh PendliÎncă nu există evaluări
- ADAMS-MATLAB Co-Simulation of A Serial ManipulatorDocument6 paginiADAMS-MATLAB Co-Simulation of A Serial Manipulator阳智Încă nu există evaluări
- Conda Cheatsheet PDFDocument2 paginiConda Cheatsheet PDFDeeptiÎncă nu există evaluări
- DhparamsDocument7 paginiDhparamsTolution OdujinrinÎncă nu există evaluări
- Book - Adams Tutorial Ex17 W PDFDocument121 paginiBook - Adams Tutorial Ex17 W PDFKamran ShahidÎncă nu există evaluări
- 793 2716 1 PB Military BlastDocument13 pagini793 2716 1 PB Military BlastkranthiÎncă nu există evaluări
- 1 2kiz6.textbook - Of.finite - Element.Analysis - by.P..Seshu PDFDocument340 pagini1 2kiz6.textbook - Of.finite - Element.Analysis - by.P..Seshu PDFmathew1965100% (1)
- Blast Protection in Military Land VehicleDocument11 paginiBlast Protection in Military Land VehiclekranthiÎncă nu există evaluări
- Blast Protection in Military Land VehicleDocument13 paginiBlast Protection in Military Land VehiclekranthiÎncă nu există evaluări
- Blast Protection in Military Land VehicleDocument11 paginiBlast Protection in Military Land VehiclekranthiÎncă nu există evaluări
- Investigation of Passive Safety Aspects For Vehicle Subjected To Mine BlastDocument12 paginiInvestigation of Passive Safety Aspects For Vehicle Subjected To Mine BlastkranthiÎncă nu există evaluări
- International Research Journal of Applied and Basic SciencesDocument17 paginiInternational Research Journal of Applied and Basic ScienceskranthiÎncă nu există evaluări
- Simulation On The Shock Response of Vehicle OccupantDocument9 paginiSimulation On The Shock Response of Vehicle OccupantkranthiÎncă nu există evaluări
- 793 2716 1 PB Military BlastDocument13 pagini793 2716 1 PB Military BlastkranthiÎncă nu există evaluări
- Orbit Onshore: Improve Safety and Reliability by Optimising InspectionDocument2 paginiOrbit Onshore: Improve Safety and Reliability by Optimising InspectionPrameleÎncă nu există evaluări
- Cognos Installation Guide ODBCDocument264 paginiCognos Installation Guide ODBCalbertoalberto_freeÎncă nu există evaluări
- Sbo42sp5 Bip Java DG en PDFDocument340 paginiSbo42sp5 Bip Java DG en PDFvadivel.km1527100% (1)
- Supply Chain and Logistics NBDocument6 paginiSupply Chain and Logistics NBAbs.shishir 2000Încă nu există evaluări
- WifiteDocument4 paginiWifitetrou12Încă nu există evaluări
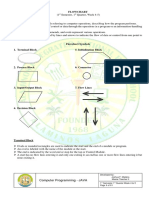
- 1st Sem 1st QTR - Week 4-5 Module in Computer Programming JAVA - Modular 11 PagesDocument11 pagini1st Sem 1st QTR - Week 4-5 Module in Computer Programming JAVA - Modular 11 PagesJoshua Fandialan MaderaÎncă nu există evaluări
- Lab - 5: Introduction To 8051 Microcontroller: 5.1 ObjectiveDocument4 paginiLab - 5: Introduction To 8051 Microcontroller: 5.1 Objectivefarheen khosoÎncă nu există evaluări
- Hardware OS Assessment-1Document7 paginiHardware OS Assessment-1Kishlay PranjalÎncă nu există evaluări
- System Coupling Tutorials 182Document114 paginiSystem Coupling Tutorials 182Fakhzan Mohd NorÎncă nu există evaluări
- Quick Guide To Enhanceing ElmDocument10 paginiQuick Guide To Enhanceing ElmmarkyrayÎncă nu există evaluări
- Itil Cobit Mapping TemplateDocument6 paginiItil Cobit Mapping Templategobits100% (3)
- DSE8003 Installation InstructionsDocument2 paginiDSE8003 Installation InstructionsIBRAHIM AL-SURAIHIÎncă nu există evaluări
- An Introduction To Gecon: Grzegorz Klima, Karol Podemski, Kaja Retkiewicz-WijtiwiakDocument16 paginiAn Introduction To Gecon: Grzegorz Klima, Karol Podemski, Kaja Retkiewicz-WijtiwiakVeljko BojovicÎncă nu există evaluări
- Real Python PDFDocument209 paginiReal Python PDFIvanov Ilya100% (1)
- Archl - Proposal - As-Built - Sir Bernard PDFDocument2 paginiArchl - Proposal - As-Built - Sir Bernard PDFLyjie BernabeÎncă nu există evaluări
- Presentation Drain2DDocument12 paginiPresentation Drain2DChockalingamÎncă nu există evaluări
- Lecture 2: GSM System Architecture S. B. Bhosle Government Polytechnic, YavatmalDocument12 paginiLecture 2: GSM System Architecture S. B. Bhosle Government Polytechnic, YavatmalSarojkumar BhosleÎncă nu există evaluări
- Updated Resume SujathaDocument3 paginiUpdated Resume Sujathasangeetha.vÎncă nu există evaluări
- Presentation9 - Query Processing and Query Optimization in DBMSDocument36 paginiPresentation9 - Query Processing and Query Optimization in DBMSsatyam singhÎncă nu există evaluări
- Application Schema ParameterDocument75 paginiApplication Schema ParameterMallikÎncă nu există evaluări
- Transport SystemDocument68 paginiTransport SystemCode GeeksÎncă nu există evaluări
- Woodward 505DEDocument4 paginiWoodward 505DEMukesh_rajharsh100% (1)
- Management Presentation 1Document10 paginiManagement Presentation 1clizardoÎncă nu există evaluări
- Visualizing Sensor Data by Christian RichterDocument7 paginiVisualizing Sensor Data by Christian RichtercingoÎncă nu există evaluări
- The Main Stakeholders For The Wedding Parties EverythingDocument10 paginiThe Main Stakeholders For The Wedding Parties EverythingLakpa TenzinÎncă nu există evaluări
- Manual GLDDocument126 paginiManual GLDIna Rodica PricăÎncă nu există evaluări
- Bizagi How To Create A Timeline For Digital TransformationDocument10 paginiBizagi How To Create A Timeline For Digital TransformationJosé María Roberto CidÎncă nu există evaluări
- Week 01 - Introduction To IT Services ManagementDocument41 paginiWeek 01 - Introduction To IT Services ManagementSonam TseringÎncă nu există evaluări
- PCCloneEX User Guide - ENGDocument14 paginiPCCloneEX User Guide - ENGjeanhertzÎncă nu există evaluări
- Time Table ManagementDocument42 paginiTime Table ManagementSatya Prasad Moharana82% (28)