S-ar putea să vă placă și
- Economía Local VS Economia GlobalDocument8 paginiEconomía Local VS Economia GlobalEeduardOo Hernandezz75% (4)
- Logistica Mova IndustrialDocument20 paginiLogistica Mova IndustrialAlbert Denilson David Rengifo100% (1)
- NavistarService - ServiceMaxx J1708Document2 paginiNavistarService - ServiceMaxx J1708Luisyxime Luisyxime100% (1)
- Pas 3 Reconocer Los Tipos de Sistemas y Procesos Tecnol GicosDocument11 paginiPas 3 Reconocer Los Tipos de Sistemas y Procesos Tecnol GicosJorge TorresÎncă nu există evaluări
- Organismo Equus FerusDocument6 paginiOrganismo Equus FerusJorge TorresÎncă nu există evaluări
- Jorge TorresDocument10 paginiJorge TorresJorge TorresÎncă nu există evaluări
- Formato de Entrega Tarea 2 PDFDocument4 paginiFormato de Entrega Tarea 2 PDFJorge TorresÎncă nu există evaluări
- Grupo 39 AdrianaAmezquita Gesti N TecnologicaDocument20 paginiGrupo 39 AdrianaAmezquita Gesti N TecnologicaJorge TorresÎncă nu există evaluări
- Formato de Entrega Tarea 2 PDFDocument4 paginiFormato de Entrega Tarea 2 PDFJorge TorresÎncă nu există evaluări
- Cordial Saludo Compañeros y TutorDocument1 paginăCordial Saludo Compañeros y TutorJorge TorresÎncă nu există evaluări
- Estado Cartera Sucursal 5Document18 paginiEstado Cartera Sucursal 5Paola HernandezÎncă nu există evaluări
- Defina en Sus Propias Palabras Que Es Un ClienteDocument3 paginiDefina en Sus Propias Palabras Que Es Un ClienteJorge Torres100% (2)
- Formato de Entrega Tarea 2 2Document5 paginiFormato de Entrega Tarea 2 2Jorge TorresÎncă nu există evaluări
- Formato de Entrega Tarea 2Document4 paginiFormato de Entrega Tarea 2Jorge TorresÎncă nu există evaluări
- Formato de Entrega Tarea 2Document4 paginiFormato de Entrega Tarea 2Jorge TorresÎncă nu există evaluări
- Nutrientes HuevoDocument4 paginiNutrientes HuevoStephanieBautistaMartinezÎncă nu există evaluări
- Tarea1 Individual Diana MendozaDocument18 paginiTarea1 Individual Diana MendozadianaÎncă nu există evaluări
- Defina en Sus Propias Palabras Que Es Un ClienteDocument3 paginiDefina en Sus Propias Palabras Que Es Un ClienteJorge Torres100% (2)
- Estado Cartera Sucursal 2 DIANABAYONADocument18 paginiEstado Cartera Sucursal 2 DIANABAYONAclaudiaÎncă nu există evaluări
- Estado Cartera Sucursal 4Document18 paginiEstado Cartera Sucursal 4JULIANGO82Încă nu există evaluări
- Insumos - Pre-TareaDocument33 paginiInsumos - Pre-TareaJorge TorresÎncă nu există evaluări
- Tarea1 Individual Carlos ArroyaveDocument18 paginiTarea1 Individual Carlos ArroyaveCarlos ArroyaveÎncă nu există evaluări
- Grupo 93 Jorgetorres Gesti N TecnologicaDocument21 paginiGrupo 93 Jorgetorres Gesti N TecnologicaJorge TorresÎncă nu există evaluări
- Defina en Sus Propias Palabras Que Es Un ClienteDocument3 paginiDefina en Sus Propias Palabras Que Es Un ClienteJorge Torres100% (2)
- Estado Cartera Sucursal 3Document18 paginiEstado Cartera Sucursal 3Diego Ladino SalazarÎncă nu există evaluări
- Pas 3 Reconocer Los Tipos de Sistemas y Procesos Tecnol GicosDocument11 paginiPas 3 Reconocer Los Tipos de Sistemas y Procesos Tecnol GicosJorge TorresÎncă nu există evaluări
- Defina en Sus Propias Palabras Que Es Un ClienteDocument3 paginiDefina en Sus Propias Palabras Que Es Un ClienteJorge Torres100% (2)
- Guía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Abstraer La Información Del EntornoDocument10 paginiGuía de Actividades y Rúbrica de Evaluación - Unidad 1 - Tarea 2 - Abstraer La Información Del Entornoalfaro mÎncă nu există evaluări
- Grupo 39 AdrianaAmezquita Gesti N TecnologicaDocument20 paginiGrupo 39 AdrianaAmezquita Gesti N TecnologicaJorge TorresÎncă nu există evaluări
- Cordial Saludo Compañeros y TutorDocument1 paginăCordial Saludo Compañeros y TutorJorge TorresÎncă nu există evaluări
- Formato de Entrega Tarea 2Document4 paginiFormato de Entrega Tarea 2Jorge Torres0% (1)
- Nutrientes HuevoDocument4 paginiNutrientes HuevoStephanieBautistaMartinezÎncă nu există evaluări
- Pas 3 Reconocer Los Tipos de Sistemas y Procesos Tecnol GicosDocument11 paginiPas 3 Reconocer Los Tipos de Sistemas y Procesos Tecnol GicosJorge TorresÎncă nu există evaluări
- Diaz4 PDFDocument1.246 paginiDiaz4 PDFKathlen Jazmin ApazaÎncă nu există evaluări
- Cursos Por Pénsum - EstudiantesDocument4 paginiCursos Por Pénsum - Estudianteshenry glidvan forbes dubonÎncă nu există evaluări
- Guia de Aprendizaje 2Document11 paginiGuia de Aprendizaje 2Natalia Villa AriasÎncă nu există evaluări
- Cuadro Comparativo Entre El Ser y Deber SerDocument3 paginiCuadro Comparativo Entre El Ser y Deber SeralexbarcolÎncă nu există evaluări
- Act#3 JBJKDocument7 paginiAct#3 JBJKBryan JimÎncă nu există evaluări
- AT&T Prepago Alcatel CAMEOX 4G LTE Con Teléfono Celular Con Memoria de 16GB Multi 5044R - Best BuyDocument2 paginiAT&T Prepago Alcatel CAMEOX 4G LTE Con Teléfono Celular Con Memoria de 16GB Multi 5044R - Best BuyRonald Jimenez TemocheÎncă nu există evaluări
- Protocolo X10Document10 paginiProtocolo X10AnGie TriViÑoÎncă nu există evaluări
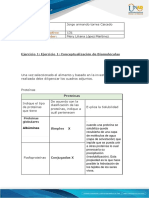
- Incidencias de ManufacturaDocument3 paginiIncidencias de ManufacturaDamaliz Almendra Reynoso ChavezÎncă nu există evaluări
- Trabajo Final Jicaro ShoesDocument28 paginiTrabajo Final Jicaro ShoesAloima Cristina Iglesias RodriguezÎncă nu există evaluări
- Eventhubs PDFDocument454 paginiEventhubs PDFoscar6430Încă nu există evaluări
- BalancedScorecard 2Document10 paginiBalancedScorecard 2Camilo MoralesÎncă nu există evaluări
- 06 Operación NVR V8 Creada20200120Document66 pagini06 Operación NVR V8 Creada20200120blackÎncă nu există evaluări
- Introducción A Las Memorias SemiconductorasDocument7 paginiIntroducción A Las Memorias SemiconductorasMarco Quintero100% (1)
- Tarea 1-3Document10 paginiTarea 1-3owen chavarriaÎncă nu există evaluări
- Manual Usuario Listo 1Document8 paginiManual Usuario Listo 1randyygamer9Încă nu există evaluări
- Diseñar y Calcular Una Escalera de Hormigón Armado para Un Cine Con Las Siguientes CaracterísticasDocument6 paginiDiseñar y Calcular Una Escalera de Hormigón Armado para Un Cine Con Las Siguientes CaracterísticasgarciaÎncă nu există evaluări
- Tecnologías Del Sexo IiDocument21 paginiTecnologías Del Sexo IiCOOKÎncă nu există evaluări
- 00 U2000 R16C50 Funciones BásicasDocument82 pagini00 U2000 R16C50 Funciones BásicasAlvaro CueÎncă nu există evaluări
- COORDINACION en Los Sistemas DistribuidosDocument55 paginiCOORDINACION en Los Sistemas DistribuidosAlan HarasicÎncă nu există evaluări
- Rup - UmlDocument20 paginiRup - UmlEddy Faustor100% (9)
- Redes de DatosDocument26 paginiRedes de DatosAndrés OspinaÎncă nu există evaluări
- Capitulo 15Document16 paginiCapitulo 15Cesar MamaniÎncă nu există evaluări
- Evaluación de Electricidad BásicaDocument5 paginiEvaluación de Electricidad BásicamarioÎncă nu există evaluări
- Visita A ObraDocument14 paginiVisita A Obraroberto inoñan chapoñanÎncă nu există evaluări
- Tarea 7 Planeación de Las OperacionesDocument11 paginiTarea 7 Planeación de Las Operacioneseddy nunezÎncă nu există evaluări
- ADO.NET.pptxDocument7 paginiADO.NET.pptxLalo Arellano MÎncă nu există evaluări
- Ca2def461257456670Document2 paginiCa2def461257456670JoshMusic CrashÎncă nu există evaluări