S-ar putea să vă placă și
- CH 2 (Operating System Structure)Document18 paginiCH 2 (Operating System Structure)Muhammad ImranÎncă nu există evaluări
- Operating System ConceptsDocument23 paginiOperating System ConceptsSherweet AlsaadanyÎncă nu există evaluări
- OperatingSystems ThePastPresentandFutureDocument10 paginiOperatingSystems ThePastPresentandFutureraji10122004Încă nu există evaluări
- English Task: Operating SystemDocument8 paginiEnglish Task: Operating SystemFitra Hari FadliÎncă nu există evaluări
- Further Readings: Check Your ProgressDocument22 paginiFurther Readings: Check Your Progresstamil selviÎncă nu există evaluări
- 18cs56 Unix NotesDocument195 pagini18cs56 Unix Noteskarkeramayur24Încă nu există evaluări
- Kernel Definition: of Memory, Which Prevents It From Being Overwritten by Other, Less Frequently UsedDocument6 paginiKernel Definition: of Memory, Which Prevents It From Being Overwritten by Other, Less Frequently Usedbro4856Încă nu există evaluări
- CSS113 Lec5 OPERATING SYSTEMDocument3 paginiCSS113 Lec5 OPERATING SYSTEMRonalyn SiaÎncă nu există evaluări
- Chapter 2: Operating-System StructuresDocument50 paginiChapter 2: Operating-System StructuresEnockÎncă nu există evaluări
- CPE 507 ProjectDocument11 paginiCPE 507 ProjectEjayeta Aj Becks ImohÎncă nu există evaluări
- Technology: Exercise-1 Introduction To Operating SystemDocument21 paginiTechnology: Exercise-1 Introduction To Operating SystemankitbhrdwjÎncă nu există evaluări
- 3 and 4 No. Lecture OSDocument28 pagini3 and 4 No. Lecture OSHighlights ManiaÎncă nu există evaluări
- System AssignmentDocument18 paginiSystem AssignmentSoothing RelaxationÎncă nu există evaluări
- Chapter 1 ONEDocument106 paginiChapter 1 ONEfatiniÎncă nu există evaluări
- Assignment (OS)Document8 paginiAssignment (OS)api-3695543Încă nu există evaluări
- ch02 - System StructuresDocument51 paginich02 - System StructuresKhairul HawaniÎncă nu există evaluări
- Computer Architecture OS 2Document32 paginiComputer Architecture OS 222031293Încă nu există evaluări
- ReadyDocument11 paginiReadyrakeshgamer504Încă nu există evaluări
- Chater-1 Operating Systems IntroductionDocument20 paginiChater-1 Operating Systems IntroductionElias YeshanawÎncă nu există evaluări
- Chapter 2: Operating-System StructuresDocument25 paginiChapter 2: Operating-System Structuresshahzod0296Încă nu există evaluări
- Functions of Operating SystemDocument4 paginiFunctions of Operating SystemJitendra PradhanÎncă nu există evaluări
- Modern Operating SystemDocument75 paginiModern Operating SystemLaxmi Pandya allFacultyÎncă nu există evaluări
- Chapter 8 Operating SystemDocument11 paginiChapter 8 Operating SystemAminiasi SalatovouÎncă nu există evaluări
- Os NotesDocument22 paginiOs Notespijodep256Încă nu există evaluări
- Operating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following TermsDocument9 paginiOperating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following TermsMeiÎncă nu există evaluări
- Chapter 1Document60 paginiChapter 1Shalinie Anbu ChelianÎncă nu există evaluări
- Lecture 2 - Process Management Part 1Document58 paginiLecture 2 - Process Management Part 1Shagun Mengi 21bcs083Încă nu există evaluări
- Ertos U4 NotesDocument13 paginiErtos U4 NotesMuppala ChiranjeeviÎncă nu există evaluări
- Operating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following TermsDocument9 paginiOperating Systems & Gui: in This Lesson Students Will: Get Familiar With The Following Termskyu haiÎncă nu există evaluări
- Chapter 1 - IntroductionDocument27 paginiChapter 1 - Introductionhhbw10Încă nu există evaluări
- Ch02 StructuresDocument67 paginiCh02 StructuresDieu Thi Diem KieuÎncă nu există evaluări
- Lecture 5Document20 paginiLecture 5Prabhu RÎncă nu există evaluări
- ch2 OsDocument17 paginich2 OsAbhijit BhongÎncă nu există evaluări
- Operating Systems Concepts For Soc DesignDocument63 paginiOperating Systems Concepts For Soc DesignAlpha HowlerÎncă nu există evaluări
- CH 2Document48 paginiCH 2Noo OppÎncă nu există evaluări
- Assignment On Operating SystemsDocument20 paginiAssignment On Operating SystemsShaunik TanejaÎncă nu există evaluări
- Introduction About Operating System: Practical-3Document6 paginiIntroduction About Operating System: Practical-3Sheenam ⎝⏠⏝⏠⎠ MahajanÎncă nu există evaluări
- Unit I: An Introduction To Operating SystemDocument12 paginiUnit I: An Introduction To Operating SystemLinda BrownÎncă nu există evaluări
- Q1-W3-Lesson4-Operating Systems-Lifeline of ComputersDocument4 paginiQ1-W3-Lesson4-Operating Systems-Lifeline of ComputersAbcde FghijkÎncă nu există evaluări
- Computer For Art (CFA) (0) Pkg.g.i.o.k.hj V Hippopotamus Kohinoor GDocument43 paginiComputer For Art (CFA) (0) Pkg.g.i.o.k.hj V Hippopotamus Kohinoor Gpreciousdominic93Încă nu există evaluări
- Operating SystemDocument70 paginiOperating SystemMuhammad Essa KhanÎncă nu există evaluări
- Case Study of UnixDocument18 paginiCase Study of UnixRahul Gupta50% (8)
- Os Practical FileDocument34 paginiOs Practical FileSonam SainiÎncă nu există evaluări
- Os FullDocument59 paginiOs FullSunil KumarÎncă nu există evaluări
- Lecture1 Introduction To Operating SystemsDocument30 paginiLecture1 Introduction To Operating SystemsMark MumbaÎncă nu există evaluări
- Notes - UP MODULE 1Document47 paginiNotes - UP MODULE 1kavitha GLÎncă nu există evaluări
- Essentials For Scienti - C Computing: Introduction To UNIX and Linux Day 1Document6 paginiEssentials For Scienti - C Computing: Introduction To UNIX and Linux Day 1MytheeshÎncă nu există evaluări
- Assignment 1 Operating System Submitted by - Swastik Gupta Roll No. - 401903025 Group - COE24 Email ID - Sgupta - Bemba19@thapar - EduDocument4 paginiAssignment 1 Operating System Submitted by - Swastik Gupta Roll No. - 401903025 Group - COE24 Email ID - Sgupta - Bemba19@thapar - EduSwastik GuptaÎncă nu există evaluări
- History of Unix, Uses and Unix Features History of UnixDocument47 paginiHistory of Unix, Uses and Unix Features History of UnixNarmatha ParthasarathyÎncă nu există evaluări
- OS Chap 2Document25 paginiOS Chap 2Ayro Business CenterÎncă nu există evaluări
- Linux Admin Lecture 1Document12 paginiLinux Admin Lecture 1bekesy7Încă nu există evaluări
- DCA6101-Unit 12-Operating System ConceptsDocument19 paginiDCA6101-Unit 12-Operating System ConceptsJust SaaÎncă nu există evaluări
- What Is An Operating System and Its Role in The Computing Environment?Document16 paginiWhat Is An Operating System and Its Role in The Computing Environment?Waqas AliÎncă nu există evaluări
- Scs 1301Document214 paginiScs 1301Vigneshwar SÎncă nu există evaluări
- Os Chapter 02Document15 paginiOs Chapter 02varnits30Încă nu există evaluări
- Ch2 Operating-System StructuresDocument88 paginiCh2 Operating-System Structurescs LiuÎncă nu există evaluări
- Case Study - SPDocument10 paginiCase Study - SPkuldeep singhÎncă nu există evaluări
- DCS216 Compiled Note-1Document75 paginiDCS216 Compiled Note-1Hafeex ShuaibuÎncă nu există evaluări
- CH 4 - Thread 2Document6 paginiCH 4 - Thread 2Yagneshwar DÎncă nu există evaluări
- Expert Systems With Applications: Nhat-Duc Hoang, Anh-Duc PhamDocument9 paginiExpert Systems With Applications: Nhat-Duc Hoang, Anh-Duc PhamYagneshwar DÎncă nu există evaluări
- Sample Paper 3Document9 paginiSample Paper 3Yagneshwar DÎncă nu există evaluări
- Sample Paper 2Document13 paginiSample Paper 2Yagneshwar DÎncă nu există evaluări
- Expert Systems With Applications: Nhat-Duc Hoang, Anh-Duc PhamDocument9 paginiExpert Systems With Applications: Nhat-Duc Hoang, Anh-Duc PhamYagneshwar DÎncă nu există evaluări
- Three Banks, One Country Econometrics AssignmentDocument23 paginiThree Banks, One Country Econometrics AssignmentYagneshwar DÎncă nu există evaluări
- Three Banks, One Country Econometrics AssignmentDocument23 paginiThree Banks, One Country Econometrics AssignmentYagneshwar DÎncă nu există evaluări
- Unit1 FSWDDocument22 paginiUnit1 FSWDJohn Solomon GameÎncă nu există evaluări
- Assignment EE5179 ME20B145 ReportDocument6 paginiAssignment EE5179 ME20B145 ReportRahul me20b145Încă nu există evaluări
- Desktop AnalysisDocument4 paginiDesktop AnalysismatthewsheeranÎncă nu există evaluări
- SHL Test DetailsDocument1 paginăSHL Test Detailsswethavarghese241198Încă nu există evaluări
- Review Udacity Android App DevelopmentDocument12 paginiReview Udacity Android App DevelopmentAkash ShindeÎncă nu există evaluări
- IBM Integration Bus Transformation OptionsDocument56 paginiIBM Integration Bus Transformation OptionsAjaibabu ChagantiÎncă nu există evaluări
- DP 4 ReportDocument46 paginiDP 4 Reportsabira mullaÎncă nu există evaluări
- Matplotlib Exercises - Jupyter NotebookDocument7 paginiMatplotlib Exercises - Jupyter NotebookROHAN CHOPDEÎncă nu există evaluări
- JEDI Slides Intro1 Chapter06 Control StructuresDocument38 paginiJEDI Slides Intro1 Chapter06 Control Structuresbawbawbiscuit6282Încă nu există evaluări
- Unit - Ii Topdown Parsing 1. Context-Free Grammars: DefinitionDocument26 paginiUnit - Ii Topdown Parsing 1. Context-Free Grammars: Definitionaarush guptaÎncă nu există evaluări
- OWASP Backend SecurityDocument198 paginiOWASP Backend SecurityNano LimaÎncă nu există evaluări
- Fortran Dev Guide 190 U5Document2.675 paginiFortran Dev Guide 190 U5Erick R Velasco ReyesÎncă nu există evaluări
- Mid - Term Datesheet Fall - 2023Document4 paginiMid - Term Datesheet Fall - 2023zaka ullahÎncă nu există evaluări
- Signal-Slot in C++Document10 paginiSignal-Slot in C++Don Camillo100% (1)
- CLASS 12 Computer Science Practical - Report Files 2023 2024Document53 paginiCLASS 12 Computer Science Practical - Report Files 2023 2024malathi100% (1)
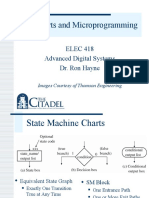
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDocument38 paginiSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22Încă nu există evaluări
- Gatling: Section A - Accompanying DocumentationDocument20 paginiGatling: Section A - Accompanying DocumentationWilliam MelquiadesÎncă nu există evaluări
- Inroduction To ZDocument10 paginiInroduction To ZCYBER GAMINGÎncă nu există evaluări
- ICS 232 Computer Organization & Architecture Homework 9 - Irvine Chapter 7 - 10 Points Due Date: 7/14/2022Document4 paginiICS 232 Computer Organization & Architecture Homework 9 - Irvine Chapter 7 - 10 Points Due Date: 7/14/2022lisa parkÎncă nu există evaluări
- Getting Starting With Prolog Using Amzi!: Select "New-Project-Prolog Project" To Start A ProjectDocument7 paginiGetting Starting With Prolog Using Amzi!: Select "New-Project-Prolog Project" To Start A ProjectcasanovakkÎncă nu există evaluări
- 07Document4 pagini07fabienÎncă nu există evaluări
- Tampermonkey Autorefresh-1Document2 paginiTampermonkey Autorefresh-1JOSEÎncă nu există evaluări
- Soft Computing Perceptron Neural Network in MATLABDocument8 paginiSoft Computing Perceptron Neural Network in MATLABSainath ParkarÎncă nu există evaluări
- Programming Language II CSE-215: Dr. Mohammad Abu Yousuf Yousuf@juniv - EduDocument34 paginiProgramming Language II CSE-215: Dr. Mohammad Abu Yousuf Yousuf@juniv - EduNaruto DragneelÎncă nu există evaluări
- UTouchDocument4 paginiUTouchJosé HeinÎncă nu există evaluări
- Complete Guide For Selenium InterviewDocument15 paginiComplete Guide For Selenium InterviewSurendarÎncă nu există evaluări
- Case StudyDocument3 paginiCase StudySthefen Nicole TomÎncă nu există evaluări
- Error in Adci ARDocument3 paginiError in Adci ARNauman KhalidÎncă nu există evaluări
- Polarfox FirstlookDocument14 paginiPolarfox FirstlookWilson PalomoÎncă nu există evaluări
- GFG Flipkart QuestionsDocument39 paginiGFG Flipkart QuestionsRajiv Poplai100% (1)