S-ar putea să vă placă și
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesDe la EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesÎncă nu există evaluări
- Chapter 3 - Section3 - 1Document9 paginiChapter 3 - Section3 - 1YaseenÎncă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- Lecture 4:sampling and Reconstruction: - Sampling - Data Reconstruction (Hold) - Reading: Chapter 3 of The TextbookDocument15 paginiLecture 4:sampling and Reconstruction: - Sampling - Data Reconstruction (Hold) - Reading: Chapter 3 of The TextbookmumtazÎncă nu există evaluări
- Data-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataDocument6 paginiData-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataArif HidayatÎncă nu există evaluări
- Unit Iv: Continuous and Discrete Time SystemsDocument32 paginiUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanÎncă nu există evaluări
- A New Method To Estimate A First-Order Plus Time Delay Model From Step ResponseDocument11 paginiA New Method To Estimate A First-Order Plus Time Delay Model From Step ResponseGetahun EsÎncă nu există evaluări
- University of Manchester CS3291: Digital Signal Processing '05-'06 Section 7: Sampling & ReconstructionDocument12 paginiUniversity of Manchester CS3291: Digital Signal Processing '05-'06 Section 7: Sampling & ReconstructionMuhammad Shoaib RabbaniÎncă nu există evaluări
- MECH 370 - Modeling, Simulation and Control Systems, Final Examination, 09:00 - 12:00, April 15, 2010 - 1/4Document4 paginiMECH 370 - Modeling, Simulation and Control Systems, Final Examination, 09:00 - 12:00, April 15, 2010 - 1/4Camila MayorgaÎncă nu există evaluări
- ENGG2310A (Fall 2018) : Problem 1-1Document11 paginiENGG2310A (Fall 2018) : Problem 1-1Tsz Wing YipÎncă nu există evaluări
- EENG 271 Signals and Systems: Linear FunctionDocument13 paginiEENG 271 Signals and Systems: Linear Functionmohammed alansariÎncă nu există evaluări
- Mid SemDocument2 paginiMid Semsourish.ambatiÎncă nu există evaluări
- Mid SemDocument2 paginiMid Semsourish.ambatiÎncă nu există evaluări
- Solved Problems: C. Impulse ResponseDocument14 paginiSolved Problems: C. Impulse ResponseDanny AdonisÎncă nu există evaluări
- ELEN30012 Lectures S1 2021 Complete Slides Annotated10June2021Document441 paginiELEN30012 Lectures S1 2021 Complete Slides Annotated10June2021yilunzhangÎncă nu există evaluări
- Transfer Function and Controller DesignDocument14 paginiTransfer Function and Controller DesignBart llÎncă nu există evaluări
- ENEE 222 Discrete Time Signal Processing: Spring 2021 Problem Set 3 - Due 2021-02-16Document2 paginiENEE 222 Discrete Time Signal Processing: Spring 2021 Problem Set 3 - Due 2021-02-16Tiana JohnsonÎncă nu există evaluări
- Analog Communication - DSBSC ModulatorsDocument3 paginiAnalog Communication - DSBSC ModulatorskhalidÎncă nu există evaluări
- 03 Chapter 03Document27 pagini03 Chapter 03Negar SatvatÎncă nu există evaluări
- Chapter2 Lect3Document14 paginiChapter2 Lect3Olga Joy Labajo GerastaÎncă nu există evaluări
- Chapter2 Lect3Document14 paginiChapter2 Lect3nctgayarangaÎncă nu există evaluări
- Communication Signals and System Design: K L UniversityDocument11 paginiCommunication Signals and System Design: K L UniversitykarthikÎncă nu există evaluări
- From EQ To Reverb & Distortion: DSP Audio Effects in Matlab: by Henry D. PfisterDocument7 paginiFrom EQ To Reverb & Distortion: DSP Audio Effects in Matlab: by Henry D. PfisterjijothibokÎncă nu există evaluări
- Signals and Networks Assignment 2Document6 paginiSignals and Networks Assignment 2Avikalp SrivastavaÎncă nu există evaluări
- Communication Systems (Solution)Document6 paginiCommunication Systems (Solution)Rana FaisalÎncă nu există evaluări
- EXP 3 RTD in Packed BedDocument21 paginiEXP 3 RTD in Packed BedIshan Mahto100% (1)
- CSE Problem Set-1Document5 paginiCSE Problem Set-1Pankaj MishraÎncă nu există evaluări
- Methods of Injection: 2: A) Pulse InputDocument25 paginiMethods of Injection: 2: A) Pulse InputmalakÎncă nu există evaluări
- Solved Problems PDFDocument7 paginiSolved Problems PDFKesuma Dewi AyuÎncă nu există evaluări
- Signals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Document2 paginiSignals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Sudhakar JoshiÎncă nu există evaluări
- 7-6 - Quantum Mechanics On NMR With The Use of Mathematica 1-28-22Document57 pagini7-6 - Quantum Mechanics On NMR With The Use of Mathematica 1-28-22vanÎncă nu există evaluări
- Elementary SignalsDocument3 paginiElementary Signalscenita009Încă nu există evaluări
- Evolutional Equations of Parabolic Type, Hiroki Tanabe, 1961Document4 paginiEvolutional Equations of Parabolic Type, Hiroki Tanabe, 1961Fis MatÎncă nu există evaluări
- 3.7 Bandpass Noise: N (T) Is A Gaussian Process, So Are NDocument10 pagini3.7 Bandpass Noise: N (T) Is A Gaussian Process, So Are NYaseenÎncă nu există evaluări
- The Volatility of Interest Rates and Forward Rates in The Hull-White ModelDocument11 paginiThe Volatility of Interest Rates and Forward Rates in The Hull-White Model楊約翰Încă nu există evaluări
- Joint TX and RX IQ Imbalance Compensation of OFDM Transceiver in Mesh NetworkDocument5 paginiJoint TX and RX IQ Imbalance Compensation of OFDM Transceiver in Mesh NetworkSandeep SunkariÎncă nu există evaluări
- Tutorial 3Document5 paginiTutorial 3Bader Al-SabriÎncă nu există evaluări
- L3: Linear, Time-Invariant (LTI) Systems and Linear DistortionDocument25 paginiL3: Linear, Time-Invariant (LTI) Systems and Linear DistortionHunter VerneÎncă nu există evaluări
- Type of Signals and SystemsDocument24 paginiType of Signals and SystemsakunooÎncă nu există evaluări
- 1 Problem 1: B C C ADocument9 pagini1 Problem 1: B C C ADeen IslamÎncă nu există evaluări
- M475 c2 Emulation NotesDocument3 paginiM475 c2 Emulation NotesAli AlmakhmariÎncă nu există evaluări
- 4 Noise in Communication SystemsDocument34 pagini4 Noise in Communication SystemsyuliÎncă nu există evaluări
- r05221902 Signals and SystemsDocument10 paginir05221902 Signals and SystemsSrinivasa Rao GÎncă nu există evaluări
- 4.SSA Video Lecture-1Document77 pagini4.SSA Video Lecture-1AkÎncă nu există evaluări
- Prestige Institute of Engineering & Science Indore (M.P.)Document7 paginiPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarÎncă nu există evaluări
- Signals and SystemsDocument15 paginiSignals and SystemsAryan VermaÎncă nu există evaluări
- Modul 2 - Sinyal Waktu KontinuDocument46 paginiModul 2 - Sinyal Waktu KontinuArdian SyahputraÎncă nu există evaluări
- EE207 Problem Set 3 IIT ROPARDocument12 paginiEE207 Problem Set 3 IIT ROPARsumithasreekumar5Încă nu există evaluări
- Etep 1Document20 paginiEtep 1berndÎncă nu există evaluări
- Jordanov NIMA.345.337 1994Document9 paginiJordanov NIMA.345.337 1994leendert_hayen7107Încă nu există evaluări
- LECT 4Characterization-Online VersionDocument38 paginiLECT 4Characterization-Online VersiontadeleÎncă nu există evaluări
- Problem Set1Document2 paginiProblem Set1Abhijith ASÎncă nu există evaluări
- Unit-II: Analysis of Discrete SystemDocument41 paginiUnit-II: Analysis of Discrete SystemRiddhijit ChattopadhyayÎncă nu există evaluări
- Signals and Systems Model 1&2 FINAL22Document10 paginiSignals and Systems Model 1&2 FINAL22GiriÎncă nu există evaluări
- Department of Electrical Engineering, IIT Madras EE419: Digital Communication SystemsDocument7 paginiDepartment of Electrical Engineering, IIT Madras EE419: Digital Communication SystemsSalai JeyaseelanÎncă nu există evaluări
- Discrete - Time Signals and SystemsDocument40 paginiDiscrete - Time Signals and Systemsfrankie_tÎncă nu există evaluări
- DCT-04 Openloop Closedloop DTSDocument28 paginiDCT-04 Openloop Closedloop DTSJuma MshamuÎncă nu există evaluări
- ELEC3400 Signal Processing Course NotesDocument68 paginiELEC3400 Signal Processing Course NotesCallan Fair BearÎncă nu există evaluări
- 3.6 Fourier Analysis MATLAB Laboratory Experiment: FIGURE 3.18: A Square Wave SignalDocument1 pagină3.6 Fourier Analysis MATLAB Laboratory Experiment: FIGURE 3.18: A Square Wave SignalDeva RaguÎncă nu există evaluări
- Week 2 - Complex Signals, Introduction To Systems (Textbook: Ch. 1.2.7, Ch. 2)Document25 paginiWeek 2 - Complex Signals, Introduction To Systems (Textbook: Ch. 1.2.7, Ch. 2)siarwafaÎncă nu există evaluări
- TemplateDocument15 paginiTemplatevkry007Încă nu există evaluări
- Design of High Speed and Area Efficient Full Adder With Body-BiasingDocument6 paginiDesign of High Speed and Area Efficient Full Adder With Body-Biasingvkry007Încă nu există evaluări
- Digital Signal ProcessingDocument70 paginiDigital Signal Processingvkry0070% (1)
- Low-Power Level Shifter ForDocument5 paginiLow-Power Level Shifter Forvkry007Încă nu există evaluări
- Study of Low Drop-Out Voltage Regulator: Amit Kumar (2013VLSI-01)Document17 paginiStudy of Low Drop-Out Voltage Regulator: Amit Kumar (2013VLSI-01)vkry007Încă nu există evaluări
- PerformanceEvaluationofFree SpaceOpticalDocument7 paginiPerformanceEvaluationofFree SpaceOpticalvkry007Încă nu există evaluări
- Optical Metro Networks 20Document13 paginiOptical Metro Networks 20vkry007Încă nu există evaluări
- 26 Tips For Spotting Errors in English For SBI PO (Part I) - ..Document10 pagini26 Tips For Spotting Errors in English For SBI PO (Part I) - ..vkry007Încă nu există evaluări
- Mod 1Document22 paginiMod 1vkry007Încă nu există evaluări
- Amie Exam FormDocument2 paginiAmie Exam Formvkry007Încă nu există evaluări
- Introduction To Spread Spectrum Communications: OutlineDocument43 paginiIntroduction To Spread Spectrum Communications: Outlinevkry007Încă nu există evaluări
- Mod 1Document22 paginiMod 1vkry007Încă nu există evaluări
- 1.1 Prey-Predator Models: DX DT Dy DT P Q, y y A BDocument19 pagini1.1 Prey-Predator Models: DX DT Dy DT P Q, y y A Bvkry007Încă nu există evaluări
- 26 Tips For Spotting Errors in English For SBI PO (Part I) - ..Document10 pagini26 Tips For Spotting Errors in English For SBI PO (Part I) - ..vkry007Încă nu există evaluări
- Geography Questions Asked in SSC CGL 2016 English .PDF-71Document9 paginiGeography Questions Asked in SSC CGL 2016 English .PDF-71Mahesh ReddyÎncă nu există evaluări
- D&C1Document31 paginiD&C1vkry007Încă nu există evaluări
- 3 FloydDocument27 pagini3 FloydNguyenDoÎncă nu există evaluări
- Modern Digital Electronics - R. P. JainDocument92 paginiModern Digital Electronics - R. P. Jainvkry007Încă nu există evaluări
- Ks TrivediDocument5 paginiKs Trivedivkry007Încă nu există evaluări
- 3 PDFDocument14 pagini3 PDFTuan nguyenÎncă nu există evaluări
- 4.projection of Points N LinesDocument22 pagini4.projection of Points N Linesravindra singhÎncă nu există evaluări
- Ziemer & Tranter: Principles of Communications Problem SolutionsDocument9 paginiZiemer & Tranter: Principles of Communications Problem Solutionsvkry007Încă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Correctness Analysis1Document88 paginiCorrectness Analysis1vkry007Încă nu există evaluări
- BSNL Settings For Gprs and 3gDocument1 paginăBSNL Settings For Gprs and 3ganantÎncă nu există evaluări
- Microcontroller Based Electronic Voting Machine: Enter Password 0Document4 paginiMicrocontroller Based Electronic Voting Machine: Enter Password 0Jonathan RobertsÎncă nu există evaluări
- A Tutorial On Pointers and Arrays in CDocument53 paginiA Tutorial On Pointers and Arrays in Cnaveen karthikeyan100% (10)
- Block Diagram of CRODocument4 paginiBlock Diagram of CROvkry007Încă nu există evaluări
- Bel SyllabusDocument1 paginăBel Syllabusvkry007Încă nu există evaluări
- NR-311102 - Digital Signal ProcessingDocument8 paginiNR-311102 - Digital Signal ProcessingSrinivasa Rao GÎncă nu există evaluări
- Morphological Image ProcessingDocument54 paginiMorphological Image ProcessingNauman AmjadÎncă nu există evaluări
- Unit-V Multicarrier Modulation: Data Transmission Using Multiple CarriersDocument9 paginiUnit-V Multicarrier Modulation: Data Transmission Using Multiple CarriersTharun konda100% (1)
- The Gabor Transform, STFT and CWT Invertibility, and Generalized Parseval S Like TheoremDocument7 paginiThe Gabor Transform, STFT and CWT Invertibility, and Generalized Parseval S Like TheoremDhurgham Al-HamdaniÎncă nu există evaluări
- 1 Wang Yuxin 2017 MSDocument61 pagini1 Wang Yuxin 2017 MSbehyaar industryÎncă nu există evaluări
- Fast Fourier TransformDocument32 paginiFast Fourier Transformanant_nimkar9243100% (1)
- Digital Signal Processing by John G. Pro Part2Document3 paginiDigital Signal Processing by John G. Pro Part2Hasan Al BannaÎncă nu există evaluări
- EE338 Tutorial 7Document5 paginiEE338 Tutorial 7ojasvi kathuriaÎncă nu există evaluări
- Fourier Transform: e F T F DT e T F T FDocument14 paginiFourier Transform: e F T F DT e T F T FRosana RadovićÎncă nu există evaluări
- 3 SpectralEstimationParametricAR MA ARMADocument76 pagini3 SpectralEstimationParametricAR MA ARMAKarl Adolphs100% (1)
- Digital Photography and Video EditingDocument8 paginiDigital Photography and Video EditingEdwin MugoÎncă nu există evaluări
- Math 5 Power Point Quarter 2Document27 paginiMath 5 Power Point Quarter 2Riza GusteÎncă nu există evaluări
- Amplifier Matching Chart 2007Document1 paginăAmplifier Matching Chart 2007bambang2000Încă nu există evaluări
- Chapter 1Document37 paginiChapter 1fayez JhsÎncă nu există evaluări
- Chapter 4Document66 paginiChapter 4Muhammad MalikÎncă nu există evaluări
- FINALIZED EXAMINATION TIMETABLE BACHELOR & DIPLOMA FINAL SEMESTER EXAMINATION SEPTEMBER 2023 SESSIONDocument70 paginiFINALIZED EXAMINATION TIMETABLE BACHELOR & DIPLOMA FINAL SEMESTER EXAMINATION SEPTEMBER 2023 SESSIONjayborhanÎncă nu există evaluări
- Chapter 7 - System ResponseDocument36 paginiChapter 7 - System Responseminh nguyenÎncă nu există evaluări
- Intrinsic Time-Scale Decomposition Time-Frequency-Energy Analysis and Real-Time Filtering of Non-Stationary Signals (2007)Document23 paginiIntrinsic Time-Scale Decomposition Time-Frequency-Energy Analysis and Real-Time Filtering of Non-Stationary Signals (2007)Zsolt ArmaiÎncă nu există evaluări
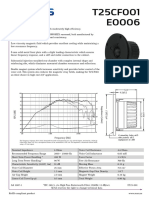
- Seas Excel E0006 t25cf001-2Document1 paginăSeas Excel E0006 t25cf001-2Laura CampbellÎncă nu există evaluări
- UnlockedDocument2 paginiUnlockedpömo cÎncă nu există evaluări
- Digital Signal ProcessingDocument271 paginiDigital Signal ProcessingPECMURUGAN100% (3)
- EQ Setting For KZ ZST: SPL Frequency Response With EQ SPL Frequency Response Without EQDocument1 paginăEQ Setting For KZ ZST: SPL Frequency Response With EQ SPL Frequency Response Without EQGRADO 0202Încă nu există evaluări
- Adaptive FilterDocument3 paginiAdaptive FilterAjith Kumar RsÎncă nu există evaluări
- 2.baseband Signal and AMDocument22 pagini2.baseband Signal and AMHimanshu SouravÎncă nu există evaluări
- Spectrum Analyzer Measurements and Noise: Application Note 1303Document32 paginiSpectrum Analyzer Measurements and Noise: Application Note 1303Ashish SiddÎncă nu există evaluări
- Measurement System BehaviourDocument48 paginiMeasurement System BehaviourpitapitulÎncă nu există evaluări
- Active FiltersDocument26 paginiActive FiltersLaraÎncă nu există evaluări
- Sony Active Subwoofer Service ManualDocument14 paginiSony Active Subwoofer Service ManualStefanøs GeForceÎncă nu există evaluări
- Analog-To-Digital Audio Conversion Example Using STM32L4 Series Microcontroller Peripherals - en - DM00367673Document38 paginiAnalog-To-Digital Audio Conversion Example Using STM32L4 Series Microcontroller Peripherals - en - DM00367673yewie561Încă nu există evaluări
- Assignment-2 Communication SystemDocument2 paginiAssignment-2 Communication SystemNihon MatsoÎncă nu există evaluări