S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Prophetic Dance - Mary JonesDocument7 paginiProphetic Dance - Mary Jonesm28181920Încă nu există evaluări
- Ford Taurus Service Manual - Disassembly and Assembly - Automatic Transaxle-Transmission - 6F35 - Automatic Transmission - PowertrainDocument62 paginiFord Taurus Service Manual - Disassembly and Assembly - Automatic Transaxle-Transmission - 6F35 - Automatic Transmission - Powertraininfocarsservice.deÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Gel Electrophoresis Lab ReportDocument10 paginiGel Electrophoresis Lab Reportapi-31150900783% (6)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- BC C Punmia BeamDocument14 paginiBC C Punmia BeamvikrantgoudaÎncă nu există evaluări
- Systematic Layout PlanningDocument45 paginiSystematic Layout Planningkevin punzalan94% (31)
- Using The 12c Real-Time SQL Monitoring Report History For Performance AnalysisDocument39 paginiUsing The 12c Real-Time SQL Monitoring Report History For Performance AnalysisJack WangÎncă nu există evaluări
- IFU Egg Yolk Tellurite EmulsionDocument4 paginiIFU Egg Yolk Tellurite EmulsionoktaÎncă nu există evaluări
- Data Sheet 6EP1457-3BA00: InputDocument4 paginiData Sheet 6EP1457-3BA00: InputSeyyed Amir MohmmadiÎncă nu există evaluări
- Cable Drag ChainDocument44 paginiCable Drag ChainsunhuynhÎncă nu există evaluări
- CHAPTER 8 SULLIVAN MyReviewerDocument7 paginiCHAPTER 8 SULLIVAN MyReviewerFrances LouiseÎncă nu există evaluări
- EC604(A) Microcontrollers and Embedded Systems Unit 2 SummaryDocument38 paginiEC604(A) Microcontrollers and Embedded Systems Unit 2 SummaryAbhay AmbuleÎncă nu există evaluări
- DP4XXX PricesDocument78 paginiDP4XXX PricesWassim KaissouniÎncă nu există evaluări
- History of PTCLDocument4 paginiHistory of PTCLswealumair86Încă nu există evaluări
- Gee1-Lp1 2022-2023Document18 paginiGee1-Lp1 2022-2023Sherrizah AlidoÎncă nu există evaluări
- ME 205 - Statics Course Syllabus: Fall 2015Document4 paginiME 205 - Statics Course Syllabus: Fall 2015Dhenil ManubatÎncă nu există evaluări
- Key-Words: - Techniques, Reflection, Corporal Punishment, EffectiveDocument7 paginiKey-Words: - Techniques, Reflection, Corporal Punishment, EffectiveManawÎncă nu există evaluări
- CGE Quester Spec Sheet E29Document2 paginiCGE Quester Spec Sheet E29Ruveen Jeetun100% (1)
- Consumer Behavior, Market Segmentation and Marketing PlanDocument57 paginiConsumer Behavior, Market Segmentation and Marketing PlanShubhamÎncă nu există evaluări
- Inner Ear Balance ProblemsDocument6 paginiInner Ear Balance ProblemsaleiyoÎncă nu există evaluări
- Shakuntala and Other Works, by KåalidåasaDocument255 paginiShakuntala and Other Works, by KåalidåasaMohamed Sayed AbdelrehimÎncă nu există evaluări
- Dslam Commissioning Steps Punjab For 960 PortDocument8 paginiDslam Commissioning Steps Punjab For 960 Portanl_bhn100% (1)
- MR - Abhishek JiDocument4 paginiMR - Abhishek Jimalikgaurav01Încă nu există evaluări
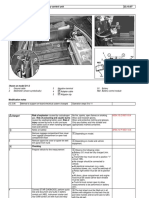
- Checking battery control unitDocument3 paginiChecking battery control unitjuanÎncă nu există evaluări
- Shrub - Wikipedia, The Free EncyclopediaDocument5 paginiShrub - Wikipedia, The Free EncyclopediabmxengineeringÎncă nu există evaluări
- Numerical Methods NotesDocument21 paginiNumerical Methods Notesdean427Încă nu există evaluări
- Sidney W A Dekker From Threat and Error Management To ResilienceDocument11 paginiSidney W A Dekker From Threat and Error Management To ResilienceDaniel fabian Sánchez henaoÎncă nu există evaluări
- Essay #01 (First Draft)Document2 paginiEssay #01 (First Draft)thanhtam3819Încă nu există evaluări
- SAP Untangled: An Introductory Guide To SAP For New HomesDocument28 paginiSAP Untangled: An Introductory Guide To SAP For New HomestempuserÎncă nu există evaluări
- Neural Networks in Data Mining: Ripundeep Singh Gill, AshimaDocument6 paginiNeural Networks in Data Mining: Ripundeep Singh Gill, AshimaIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalÎncă nu există evaluări
- Metaswitch Datasheet Network Transformation OverviewDocument5 paginiMetaswitch Datasheet Network Transformation OverviewblitoÎncă nu există evaluări