S-ar putea să vă placă și
- Practical Power System and Protective Relays CommissioningDe la EverandPractical Power System and Protective Relays CommissioningEvaluare: 4.5 din 5 stele4.5/5 (10)
- DTCDocument26 paginiDTCMELVINÎncă nu există evaluări
- ED LAB ManualDocument31 paginiED LAB Manualmanoj kumar100% (1)
- VTU Solution - 18EE741Document44 paginiVTU Solution - 18EE741kip21ee100% (1)
- Capacitor Start/Run Induction Motor: ExperimentDocument9 paginiCapacitor Start/Run Induction Motor: ExperimentMarcos Roberto ReinertÎncă nu există evaluări
- Industrial Drives Lab File PDFDocument19 paginiIndustrial Drives Lab File PDFMayankJainÎncă nu există evaluări
- Chapter 15 Control of A C DrivesDocument32 paginiChapter 15 Control of A C DrivesMuhammad AneesÎncă nu există evaluări
- Speed Control of Universal Motor Using 1 Phase SemiconverterDocument2 paginiSpeed Control of Universal Motor Using 1 Phase SemiconverterscribsunilÎncă nu există evaluări
- Eee-Vii-Industrial Drives and Applications (10ee74) - NotesDocument90 paginiEee-Vii-Industrial Drives and Applications (10ee74) - NotesChithra ManivelanÎncă nu există evaluări
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 paginiExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalÎncă nu există evaluări
- High Voltage Engineering Lec2Document14 paginiHigh Voltage Engineering Lec2nasirvivacÎncă nu există evaluări
- Assignment-4 Noc18 Ee44 61Document4 paginiAssignment-4 Noc18 Ee44 61Sudip Mondal100% (1)
- AC DC DrivesDocument13 paginiAC DC Drives322399mk7086Încă nu există evaluări
- Pe Final Ex SS 2010-2011Document8 paginiPe Final Ex SS 2010-2011Saif Uddin100% (1)
- A Report On The "3-Phase Line Fault Detector" Ee344 Minor Project - IDocument34 paginiA Report On The "3-Phase Line Fault Detector" Ee344 Minor Project - IDhruv PatelÎncă nu există evaluări
- DC ChoppersDocument38 paginiDC Chopperspsoumya50% (2)
- Minimizing Penalty in Industrial Power Consumption by Engaging APFC UnitDocument5 paginiMinimizing Penalty in Industrial Power Consumption by Engaging APFC UnitZeeshan KhanÎncă nu există evaluări
- Single Line Power Network Diagram-KashmirDocument1 paginăSingle Line Power Network Diagram-KashmirMirza Abdul WarisÎncă nu există evaluări
- EEET 205 Lab - 102Document53 paginiEEET 205 Lab - 102Franch Maverick Arellano LorillaÎncă nu există evaluări
- Question Bank-EE2352 - Solid State DrivesDocument4 paginiQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- BEE Question Bank 1 PDFDocument2 paginiBEE Question Bank 1 PDFchaitanyaÎncă nu există evaluări
- Electrical Machines and Drives Year Question PaperDocument2 paginiElectrical Machines and Drives Year Question PapersivaeinfoÎncă nu există evaluări
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 paginiElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraÎncă nu există evaluări
- RGPV Syllabus Btech Ee 5 Sem All SubjectsDocument17 paginiRGPV Syllabus Btech Ee 5 Sem All SubjectsSandeep TaleÎncă nu există evaluări
- Power Electronics Lab Manual1Document72 paginiPower Electronics Lab Manual1Harish SvÎncă nu există evaluări
- ECE 424 - Assign3Document2 paginiECE 424 - Assign3Amos Atandi0% (1)
- Closed Loop Control of Separately Excited DC MotorDocument13 paginiClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHIÎncă nu există evaluări
- Drives and Control Lab ManualDocument36 paginiDrives and Control Lab ManualKabilanÎncă nu există evaluări
- Slides For Multi Level Inverter in Psim PDFDocument41 paginiSlides For Multi Level Inverter in Psim PDFmuhammad saeedÎncă nu există evaluări
- DC - Ac Inv.Document82 paginiDC - Ac Inv.Jegadeeswari GÎncă nu există evaluări
- Power Electronics Lab ManualDocument89 paginiPower Electronics Lab ManualPartha DewriÎncă nu există evaluări
- Basic Power Electronics Notes 2.1 To 2.3 PDFDocument8 paginiBasic Power Electronics Notes 2.1 To 2.3 PDFEscape From EngineeringÎncă nu există evaluări
- Solutions For Assignment - 2Document3 paginiSolutions For Assignment - 2KarthikeyanKarun75% (4)
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDocument8 paginiImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
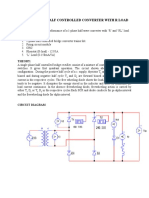
- Single Phase Half Controlled Converter With R LoadDocument3 paginiSingle Phase Half Controlled Converter With R LoadB ANIL KUMARÎncă nu există evaluări
- 100kW Solar SLDDocument1 pagină100kW Solar SLDBoobalanÎncă nu există evaluări
- Diploma: A Project Report OnDocument3 paginiDiploma: A Project Report OnVasu ThakurÎncă nu există evaluări
- Power Electronics: Single Phase AC-AC ConvertersDocument18 paginiPower Electronics: Single Phase AC-AC ConvertersMaruti MohiteÎncă nu există evaluări
- Single Phase Induction Motor Speed ControlDocument35 paginiSingle Phase Induction Motor Speed ControlHarshit Sengar100% (2)
- M.tech ThesisDocument59 paginiM.tech ThesisRama Krishna100% (1)
- Lab 7 - Simulation of Characteristic Curve of DC Motor On MATLAB (Simulink) PDFDocument7 paginiLab 7 - Simulation of Characteristic Curve of DC Motor On MATLAB (Simulink) PDFAnusha Rehman100% (1)
- Lic TemplateDocument117 paginiLic TemplateAkshaya M -108Încă nu există evaluări
- Power Electronics IntroductionDocument18 paginiPower Electronics Introductionsagar378Încă nu există evaluări
- 4 - Asa MethodDocument8 pagini4 - Asa MethodsasikalasivakumarÎncă nu există evaluări
- PE&I questionbankIIIsemDocument2 paginiPE&I questionbankIIIsemSavita SomaÎncă nu există evaluări
- Transformer Testing Using MatlabDocument6 paginiTransformer Testing Using MatlabPramodTeliÎncă nu există evaluări
- Lab 13-Under Voltage and Over Voltage Monitoring Numerical RelayDocument5 paginiLab 13-Under Voltage and Over Voltage Monitoring Numerical RelayAliza Sharif100% (1)
- V and Inverted V Curves of Synchronous MotorDocument7 paginiV and Inverted V Curves of Synchronous Motorkarthikeyan249Încă nu există evaluări
- 32.light Intensity Control Circuit Using Electrical Device.Document6 pagini32.light Intensity Control Circuit Using Electrical Device.Pooja Ban100% (1)
- Unit 8 - Week 7: Assignment 7Document4 paginiUnit 8 - Week 7: Assignment 7venugopal pudurÎncă nu există evaluări
- Final Et NotesDocument123 paginiFinal Et NotesyounusmohamadÎncă nu există evaluări
- A McMurray InverterDocument2 paginiA McMurray Inverteranshu71% (7)
- Power System Reactance Diagram Questions PDFDocument22 paginiPower System Reactance Diagram Questions PDFHota bÎncă nu există evaluări
- Bee4113 Chapter 4Document31 paginiBee4113 Chapter 4Kung ChinHan100% (4)
- PDFDocument36 paginiPDFمحمد احمدÎncă nu există evaluări
- ChopperDocument60 paginiChopperSudeep BhesettyÎncă nu există evaluări
- Power Quality ImprovementDocument9 paginiPower Quality ImprovementDileepChowdaryÎncă nu există evaluări
- Project Report - Docx 11111Document46 paginiProject Report - Docx 11111Narayan SutharÎncă nu există evaluări
- JahangirThesis Final (27 (1) .04.10)Document93 paginiJahangirThesis Final (27 (1) .04.10)sabuj22Încă nu există evaluări
- Mini ProjectDocument66 paginiMini Projectrohith kuruvaÎncă nu există evaluări
- R18 B.Tech. EEE Syllabus Jntu HyderabadDocument2 paginiR18 B.Tech. EEE Syllabus Jntu HyderabadUpender Rao SunkishalaÎncă nu există evaluări
- Psoc 1 2Document54 paginiPsoc 1 2Upender Rao SunkishalaÎncă nu există evaluări
- Psoc 4 2Document43 paginiPsoc 4 2Upender Rao SunkishalaÎncă nu există evaluări
- Psoc 3 2Document21 paginiPsoc 3 2Upender Rao SunkishalaÎncă nu există evaluări
- Psoc 5 2Document24 paginiPsoc 5 2Upender Rao SunkishalaÎncă nu există evaluări
- Document-WPS OfficeDocument1 paginăDocument-WPS OfficeUpender Rao SunkishalaÎncă nu există evaluări
- Invitation: The Department of Electrical and Electronics Engineering (EEE)Document1 paginăInvitation: The Department of Electrical and Electronics Engineering (EEE)Upender Rao SunkishalaÎncă nu există evaluări
- Laboratory Test Report: Test Name Result Biological Reference Interval Serum Status: TriglyceridesDocument1 paginăLaboratory Test Report: Test Name Result Biological Reference Interval Serum Status: TriglyceridesUpender Rao SunkishalaÎncă nu există evaluări
- Viva Voce in Electrical Engineering PDFDocument166 paginiViva Voce in Electrical Engineering PDFUpender Rao SunkishalaÎncă nu există evaluări
- Ehvac and HVDC Digital NotesDocument69 paginiEhvac and HVDC Digital NotesUpender Rao Sunkishala50% (2)
- List of ExperimentsDocument59 paginiList of ExperimentsUpender Rao SunkishalaÎncă nu există evaluări
- Psoc 2 2Document23 paginiPsoc 2 2Upender Rao SunkishalaÎncă nu există evaluări
- Controls Systems ExamplesDocument67 paginiControls Systems ExamplesUpender Rao SunkishalaÎncă nu există evaluări
- UNIT5 Fundamentals of Communication EngineeringDocument20 paginiUNIT5 Fundamentals of Communication EngineeringUpender Rao Sunkishala100% (4)
- ElectricalEngineerigLabManual IIECE PDFDocument75 paginiElectricalEngineerigLabManual IIECE PDFUpender Rao SunkishalaÎncă nu există evaluări
- Unit-Iii Semiconductor Devices and Applications: Part ADocument8 paginiUnit-Iii Semiconductor Devices and Applications: Part AUpender Rao SunkishalaÎncă nu există evaluări
- BEEE Question Bank Unit 1,2Document13 paginiBEEE Question Bank Unit 1,2Upender Rao SunkishalaÎncă nu există evaluări
- NES Limit Enhancement PDFDocument1 paginăNES Limit Enhancement PDFUpender Rao SunkishalaÎncă nu există evaluări
- PSP Lab Manual Exp 8Document3 paginiPSP Lab Manual Exp 8RvermaÎncă nu există evaluări
- Ansi C57 12 50 1981 PDFDocument26 paginiAnsi C57 12 50 1981 PDFdiscovered213Încă nu există evaluări
- Electrical CatalogDocument20 paginiElectrical CatalogVirender RanaÎncă nu există evaluări
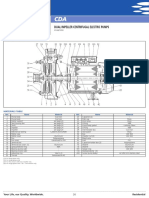
- Ficha Tecnica de Partes y Piezas de Las Bombas CDADocument2 paginiFicha Tecnica de Partes y Piezas de Las Bombas CDAdamc321Încă nu există evaluări
- Guidelines For The Design of Large Power Transformers Up To 132 KV, in The Rating Range of 1,25 Mva To 160 MvaDocument111 paginiGuidelines For The Design of Large Power Transformers Up To 132 KV, in The Rating Range of 1,25 Mva To 160 MvaKhashane Willy Mohale50% (2)
- Manual Ecodial 2Document44 paginiManual Ecodial 2Anthony AdamsÎncă nu există evaluări
- Tutorial 2 Power SystemDocument2 paginiTutorial 2 Power Systemhafiz azmanÎncă nu există evaluări
- Neutral Grounding Resistor (NGR)Document14 paginiNeutral Grounding Resistor (NGR)vennapusa VenkateshÎncă nu există evaluări
- 3 Phase ApplicationDocument5 pagini3 Phase ApplicationIwan BaeÎncă nu există evaluări
- 4 - SIPROTEC 7SD60 Numerical Pilot-Wire Current Differential Protection Relay PDFDocument14 pagini4 - SIPROTEC 7SD60 Numerical Pilot-Wire Current Differential Protection Relay PDFsaina124796010Încă nu există evaluări
- P012... / P016... / P020... PX12... / PX16... / PX20... : Strawinskylaan 1105 1077 XX Amsterdam, The NetherlandsDocument20 paginiP012... / P016... / P020... PX12... / PX16... / PX20... : Strawinskylaan 1105 1077 XX Amsterdam, The NetherlandsRadwan AL TrougÎncă nu există evaluări
- Anienergia Ecodesign TransformersDocument12 paginiAnienergia Ecodesign TransformersSergioRamosÎncă nu există evaluări
- Pressed PDFDocument22 paginiPressed PDFSayan MukherjeeÎncă nu există evaluări
- PlowDocument26 paginiPlowNoman RizwanÎncă nu există evaluări
- Q-Sun Test ChambersDocument122 paginiQ-Sun Test ChambersRichard EddingtonÎncă nu există evaluări
- Ground Monitor: Installation and Maintenace Manual FORDocument24 paginiGround Monitor: Installation and Maintenace Manual FORGuillermo de Jesús López MoralesÎncă nu există evaluări
- Course OverviewDocument12 paginiCourse OverviewBhakti MatsyapalÎncă nu există evaluări
- Ds Thomas Picolino Vte-Dte Rotary VaneDocument12 paginiDs Thomas Picolino Vte-Dte Rotary Vanesemih KokÎncă nu există evaluări
- 1 DC Motors and ConvertersDocument42 pagini1 DC Motors and ConvertersrajapeeeÎncă nu există evaluări
- Catalog Edibon 2011Document92 paginiCatalog Edibon 2011sady1967100% (1)
- EE8702 Only4electrical - in Power System Operation and Control MCQDocument12 paginiEE8702 Only4electrical - in Power System Operation and Control MCQAmit MasareÎncă nu există evaluări
- Mechanic Medical Electronics.146180428Document37 paginiMechanic Medical Electronics.146180428swami061009Încă nu există evaluări
- Furnace TransformerDocument20 paginiFurnace TransformerNayanÎncă nu există evaluări
- HCI534C/544C - Winding 311 Single Phase: Technical Data SheetDocument9 paginiHCI534C/544C - Winding 311 Single Phase: Technical Data SheetAhmed El-FayoumyÎncă nu există evaluări
- Energy Conversion: Ruben J. Dichoso InstructorDocument24 paginiEnergy Conversion: Ruben J. Dichoso InstructorCj LlemosÎncă nu există evaluări
- Trafo k-13Document3 paginiTrafo k-13Wicax TegguhÎncă nu există evaluări
- MIB, Data Sheet 4921210109 UKDocument5 paginiMIB, Data Sheet 4921210109 UKJair JoyaÎncă nu există evaluări
- MVA Method Short CircuitDocument3 paginiMVA Method Short Circuitgodama42Încă nu există evaluări
- Control Strategy For Three Phase PWM Rectifier Using SVM ModulationDocument7 paginiControl Strategy For Three Phase PWM Rectifier Using SVM Modulationeditor_ijtelÎncă nu există evaluări
- Athena 60 Installation Manual EN 2022.07.03Document30 paginiAthena 60 Installation Manual EN 2022.07.03joaquin.cadondonÎncă nu există evaluări