S-ar putea să vă placă și
- Ejercicios de Mate Básica 2 - UNI FIADocument10 paginiEjercicios de Mate Básica 2 - UNI FIARossy IP100% (1)
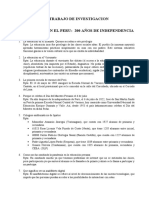
- Trabajo de InvestigacionDocument1 paginăTrabajo de InvestigacionKiandra LazaroÎncă nu există evaluări
- Problemas Resueltos de Analisis MatematicoDocument129 paginiProblemas Resueltos de Analisis MatematicoCelso Ederson PLÎncă nu există evaluări
- Tipos de Escuela y Su PropositoDocument2 paginiTipos de Escuela y Su PropositoFernanda GomezÎncă nu există evaluări
- RESPUESTAS Guia Practica Unidad 1-BDocument2 paginiRESPUESTAS Guia Practica Unidad 1-BAdrian Antonio Branco CuervoÎncă nu există evaluări
- Fracciones y Razones-2Document15 paginiFracciones y Razones-2Jaime Oros GamarraÎncă nu există evaluări
- Paralelismo y Perpendicularidad 2022-IDocument26 paginiParalelismo y Perpendicularidad 2022-I鳥山 ザンダーソトÎncă nu există evaluări
- 01guia01Document2 pagini01guia01ELe MaGoÎncă nu există evaluări
- DESAFIO 55 Los Jugos PDFDocument2 paginiDESAFIO 55 Los Jugos PDFLourdes Pacheco CalleÎncă nu există evaluări
- Numeros EnterosDocument3 paginiNumeros Enterosmaxwim1984Încă nu există evaluări
- Latex - Apuntes3 - Formulas Matemáticas, Conceptos BásicosDocument20 paginiLatex - Apuntes3 - Formulas Matemáticas, Conceptos BásicosDaniel García TebaÎncă nu există evaluări
- Mate Tema 11 12 13Document12 paginiMate Tema 11 12 13Teresa GarcíaÎncă nu există evaluări
- Relaciones Métricas en La CircunferenciaDocument10 paginiRelaciones Métricas en La CircunferenciaDiana Carolina Melendez EvangelistaÎncă nu există evaluări
- Matematicas ComplementariasDocument128 paginiMatematicas Complementariasrig3faby100% (1)
- M4Document6 paginiM4Moises Vilca VilcaÎncă nu există evaluări
- Sec 11.7, Coordenadas Cilindricas y EsfericasDocument41 paginiSec 11.7, Coordenadas Cilindricas y Esfericasjose2182100% (1)
- SEMBLANZADocument5 paginiSEMBLANZAAriel FloresÎncă nu există evaluări
- Algebra - 4to - PamerDocument76 paginiAlgebra - 4to - PamerHenrry Miguel MEZA ALVAREZ100% (2)
- Ecuaciones de Primer GradoDocument2 paginiEcuaciones de Primer GradoSebastian Alonso Sosa PerreiraÎncă nu există evaluări
- RSM - Domiciliaria - 05 - TrigonometríaDocument3 paginiRSM - Domiciliaria - 05 - TrigonometríasantiagoÎncă nu există evaluări
- Lecciones Algebra LinealDocument138 paginiLecciones Algebra Linealedward034Încă nu există evaluări
- ESFERADocument6 paginiESFERAFranko AlcidesÎncă nu există evaluări
- Refuerzao y Ampliacion de MatematicasDocument56 paginiRefuerzao y Ampliacion de MatematicasHarnyz Muñoz RoaÎncă nu există evaluări
- Qué Es FactorizaciónDocument8 paginiQué Es FactorizaciónfrankÎncă nu există evaluări
- Go Math 10.2 SpanishDocument3 paginiGo Math 10.2 SpanishKamarta MartinezÎncă nu există evaluări
- Lineasnotables 190908182440Document1 paginăLineasnotables 190908182440Daniel López PérezÎncă nu există evaluări
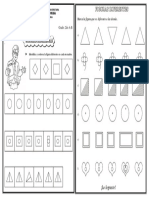
- Ficha Individual de Razonamiento Matematico - Figuras Diferentes 8 de MayoDocument1 paginăFicha Individual de Razonamiento Matematico - Figuras Diferentes 8 de MayoDfs PeruÎncă nu există evaluări
- Factorizacion Utilizando Formula General Segundo GradoDocument29 paginiFactorizacion Utilizando Formula General Segundo Gradoblink42jÎncă nu există evaluări
- Nomina de Matricula en BlancoDocument13 paginiNomina de Matricula en BlancoAndres Rojas67% (3)
- Ejercicios Mate 3Document12 paginiEjercicios Mate 3Nemes RamírezÎncă nu există evaluări