S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 3180 OXIMETRO 1905 v3Document25 pagini3180 OXIMETRO 1905 v3Ernesto AcostaÎncă nu există evaluări
- Description/ordering Information (Continued)Document4 paginiDescription/ordering Information (Continued)Dimple AmudaÎncă nu există evaluări
- Ilicore: 4-Ch Drive +power Controller For Portable CD D5901Document16 paginiIlicore: 4-Ch Drive +power Controller For Portable CD D5901vetchboyÎncă nu există evaluări
- Electric Motors For RoboticsDocument16 paginiElectric Motors For RoboticsMunindar KumarÎncă nu există evaluări
- Alba Had Ly 2015 NewDocument6 paginiAlba Had Ly 2015 NewSyafrian NugrohoÎncă nu există evaluări
- A New Multilevel Inverter Topology With Reduce Switch CountDocument11 paginiA New Multilevel Inverter Topology With Reduce Switch CountRodovarÎncă nu există evaluări
- LFR ReportDocument91 paginiLFR ReportRahul Salim NarayananÎncă nu există evaluări
- Multilevel Inverter Simulation Using PsimDocument41 paginiMultilevel Inverter Simulation Using Psimthienvuong90100% (1)
- Seminar ReportDocument14 paginiSeminar ReportShruthi B S100% (1)
- 92.railway Track Pedestrain Crossing Without Using StaircaseDocument3 pagini92.railway Track Pedestrain Crossing Without Using StaircaseMaragoni MukeshÎncă nu există evaluări
- drv8825 PDFDocument32 paginidrv8825 PDFGerson FelipeÎncă nu există evaluări
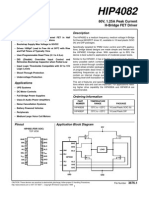
- Hip 4082Document12 paginiHip 4082flo724Încă nu există evaluări
- Hand Gesture Controlled RobotDocument59 paginiHand Gesture Controlled RobotNiharikaÎncă nu există evaluări
- Major Project ReportDocument46 paginiMajor Project ReportAman SinghÎncă nu există evaluări
- Analog Electronics Project RevisedDocument19 paginiAnalog Electronics Project Revisedyug varshneyÎncă nu există evaluări
- DC Motor Direction Control Using L293d (H Bridge)Document5 paginiDC Motor Direction Control Using L293d (H Bridge)Syed Aameer100% (1)
- Design and Construction of A Pure Sine Wave InverterDocument8 paginiDesign and Construction of A Pure Sine Wave InverterAlvaro Javier Baños Rivera100% (1)
- 9019Document17 pagini9019Dan Esenther100% (1)
- Analysis of Transformerless UPFC With FFM Phase ShiftingDocument4 paginiAnalysis of Transformerless UPFC With FFM Phase ShiftingVinay BagaliÎncă nu există evaluări
- 212 Fall 2005 PDFDocument176 pagini212 Fall 2005 PDFcombatps1Încă nu există evaluări
- Ee 328 Lecture 11Document55 paginiEe 328 Lecture 11somethingfornowÎncă nu există evaluări
- Solar Tracker:: B-Term ReportDocument48 paginiSolar Tracker:: B-Term ReportTanviÎncă nu există evaluări
- EEE Main Project ListDocument14 paginiEEE Main Project ListPrashant ChinamalliÎncă nu există evaluări
- DVR ThesisDocument41 paginiDVR ThesisJeffersonGoVaO'Neil100% (1)
- Unmanned Ground Vehicle Project ReportDocument187 paginiUnmanned Ground Vehicle Project ReportAdil Ahsan0% (2)
- Capacitive Power Transfer For Contactless ChargingDocument7 paginiCapacitive Power Transfer For Contactless ChargingiMiklaeÎncă nu există evaluări
- WCE2017 pp277-282Document6 paginiWCE2017 pp277-282cristi25Încă nu există evaluări
- An 9324Document14 paginiAn 9324Christian PizziÎncă nu există evaluări
- Unit - 5 8051 Interfacing Andapplications Interfacing of 8051with: Analog Sensors, Keypad & LCD Display, ADC, DAC, DC Motor. LCD InterfacingDocument31 paginiUnit - 5 8051 Interfacing Andapplications Interfacing of 8051with: Analog Sensors, Keypad & LCD Display, ADC, DAC, DC Motor. LCD InterfacingNusret YılmazÎncă nu există evaluări
- Qdr4500 Technical ManualDocument250 paginiQdr4500 Technical Manualcrisbar80% (5)