S-ar putea să vă placă și
- WS QHSE Std23 3313701 07Document24 paginiWS QHSE Std23 3313701 07ralph100% (1)
- Suggested Answers To The 2017 Bar Examination Questions in Political Law Up Law CenterDocument21 paginiSuggested Answers To The 2017 Bar Examination Questions in Political Law Up Law CenterJennifer Garcia Erese100% (6)
- Global MigrationDocument39 paginiGlobal MigrationLiane Francesita Mendoza100% (1)
- Final Paper KPDocument34 paginiFinal Paper KPAnn ChanÎncă nu există evaluări
- SPA5304 Physical Dynamics Lecture 5-6: 1.1 Internal vs. External ForcesDocument6 paginiSPA5304 Physical Dynamics Lecture 5-6: 1.1 Internal vs. External ForcesRoy VeseyÎncă nu există evaluări
- Section 2 AER506Document11 paginiSection 2 AER506MBÎncă nu există evaluări
- Physics 303/573 Systems With More Than One Particle: 1 Center of MassDocument6 paginiPhysics 303/573 Systems With More Than One Particle: 1 Center of MassJLÎncă nu există evaluări
- Classical Mechanics Motion Under Central ForcesDocument16 paginiClassical Mechanics Motion Under Central Forcessudipta paulÎncă nu există evaluări
- Exercises On Statics and Rotational DynamicsDocument30 paginiExercises On Statics and Rotational Dynamicselty TanÎncă nu există evaluări
- Bulletin of The Seismological Society of America. Vol. No. 6, Pp. 1811-1841. December, 1964Document31 paginiBulletin of The Seismological Society of America. Vol. No. 6, Pp. 1811-1841. December, 1964LavJoshiÎncă nu există evaluări
- PHD Lecture02 03Document9 paginiPHD Lecture02 03Roy VeseyÎncă nu există evaluări
- BF02712305Document10 paginiBF02712305Ivie RibeiroÎncă nu există evaluări
- Central Force Is ConservativeDocument9 paginiCentral Force Is ConservativeShivamÎncă nu există evaluări
- Dynamics of Continuos Multispan Beams Under A Moving ForceDocument8 paginiDynamics of Continuos Multispan Beams Under A Moving ForceGerardo Nuñez MirandaÎncă nu există evaluări
- Lab201 f2018 Torque and Center of MassDocument7 paginiLab201 f2018 Torque and Center of MassKelly JospehÎncă nu există evaluări
- L06 Solver21Document20 paginiL06 Solver21Jaime TiburcioÎncă nu există evaluări
- 2D Rigid Body Dynamics Work and EnergyDocument6 pagini2D Rigid Body Dynamics Work and Energyjehan11Încă nu există evaluări
- Solution Problem Set 11Document7 paginiSolution Problem Set 11Nick WisnerÎncă nu există evaluări
- Solution Problem Set 11 PDFDocument7 paginiSolution Problem Set 11 PDFJasdeepSinghÎncă nu există evaluări
- Solution Problem Set 11 PDFDocument7 paginiSolution Problem Set 11 PDFJasdeep SinghÎncă nu există evaluări
- Joel A ShapiroDocument32 paginiJoel A ShapiroAgtc TandayÎncă nu există evaluări
- Planar Kinetics of A Rigid Body Force and AccelerationDocument10 paginiPlanar Kinetics of A Rigid Body Force and AccelerationManjunath DÎncă nu există evaluări
- eScatteringFormFactors Supplemental PDFDocument11 paginieScatteringFormFactors Supplemental PDFtsania nkdÎncă nu există evaluări
- The Vector Nature of Rotation: Angular Velocity Right-Hand-Rule: TorqueDocument11 paginiThe Vector Nature of Rotation: Angular Velocity Right-Hand-Rule: TorqueMane aniketÎncă nu există evaluări
- 1921 - Timoshenko - On The Correction For Shear of The Diferential Equation For Transverse VibrationsDocument3 pagini1921 - Timoshenko - On The Correction For Shear of The Diferential Equation For Transverse VibrationsJuan Karlos Alberca AlfaroÎncă nu există evaluări
- MomentumDocument13 paginiMomentumEgemen AkbulutÎncă nu există evaluări
- 018-023 Acta MathematicaDocument6 pagini018-023 Acta MathematicaDragan KankarasÎncă nu există evaluări
- Non-Inertial Reference Frames: 1 MotivationDocument7 paginiNon-Inertial Reference Frames: 1 MotivationMarco San Martín HormazábalÎncă nu există evaluări
- Force Systems (Mechanics - ME10001) : Dr. Puneet Kumar PatraDocument35 paginiForce Systems (Mechanics - ME10001) : Dr. Puneet Kumar PatraManisha JindalÎncă nu există evaluări
- Burridge and Knopoff 1964 BSSA BodyForceEquivalentsForSeismicDislocationsDocument14 paginiBurridge and Knopoff 1964 BSSA BodyForceEquivalentsForSeismicDislocationsFrancisco Javier Villaseca AhumadaÎncă nu există evaluări
- Short Proof of A "Radon-Nikodym Theorem" For Additive FunctionalsDocument4 paginiShort Proof of A "Radon-Nikodym Theorem" For Additive FunctionalsJacek PodlewskiÎncă nu există evaluări
- Thomson PhilMag 7 237 1904Document30 paginiThomson PhilMag 7 237 1904G. AlfredÎncă nu există evaluări
- 02 PDFDocument7 pagini02 PDFStephanie ParkÎncă nu există evaluări
- WongDocument6 paginiWongAlvaro Rafael MartínezÎncă nu există evaluări
- 02 PDFDocument7 pagini02 PDFmojarramanÎncă nu există evaluări
- 33 2005 Article BF01594906Document8 pagini33 2005 Article BF01594906eqÎncă nu există evaluări
- AST1100 Lecture Notes: 1-2 Celestial MechanicsDocument20 paginiAST1100 Lecture Notes: 1-2 Celestial MechanicsPrajwal B NaikÎncă nu există evaluări
- Conservation of Energy Problems Worksheet 5Document13 paginiConservation of Energy Problems Worksheet 5Balkis MungurÎncă nu există evaluări
- Beam 11Document10 paginiBeam 11osama hasanÎncă nu există evaluări
- TMP EEDBDocument8 paginiTMP EEDBFrontiersÎncă nu există evaluări
- Ass AsDocument24 paginiAss AsMukesh BishtÎncă nu există evaluări
- 2/ Ronx+ro X Ro V: School of Engineering University of California, MercedDocument3 pagini2/ Ronx+ro X Ro V: School of Engineering University of California, MercedJorge SolorioÎncă nu există evaluări
- Week 10 PDFDocument8 paginiWeek 10 PDFDPÎncă nu există evaluări
- Isomorphic Polynomial RingsDocument5 paginiIsomorphic Polynomial RingsMohamed KhalifaÎncă nu există evaluări
- Topic4 - NewtonsLaws of MotionDocument18 paginiTopic4 - NewtonsLaws of MotionPatrick SibandaÎncă nu există evaluări
- Chapter 7. Rotation in 3 Dimensions.: 1 Concept of Rigid BodyDocument10 paginiChapter 7. Rotation in 3 Dimensions.: 1 Concept of Rigid BodyMatias Allegroni JimenezÎncă nu există evaluări
- Bihari's InequalityDocument14 paginiBihari's InequalityflausenÎncă nu există evaluări
- Week 1: Review Material: C David Berenstein 2009Document8 paginiWeek 1: Review Material: C David Berenstein 2009GÎncă nu există evaluări
- PHD Lecture01Document6 paginiPHD Lecture01Roy VeseyÎncă nu există evaluări
- Weak Type Inequalities For Fractional Maximal Operator On Weighted Orlicz SpacesDocument7 paginiWeak Type Inequalities For Fractional Maximal Operator On Weighted Orlicz SpacesSonia AcinasÎncă nu există evaluări
- Binder 3 CDocument14 paginiBinder 3 Csupergravity66Încă nu există evaluări
- On Boundary Conditions For Polar MaterialsDocument10 paginiOn Boundary Conditions For Polar Materialsdavinder kumarÎncă nu există evaluări
- Coombs 1948 A Role of Correlation in Analysis of VarianceDocument11 paginiCoombs 1948 A Role of Correlation in Analysis of VarianceCarlos AndradeÎncă nu există evaluări
- Dorea 1983, Expected Number of Steps of A Random Optimization MehtodDocument7 paginiDorea 1983, Expected Number of Steps of A Random Optimization Mehtodhgak751Încă nu există evaluări
- Black Holes - TWMposter 12apr09Document12 paginiBlack Holes - TWMposter 12apr09maxwallis100% (2)
- 1 s2.0 0003484382900225 Main PDFDocument30 pagini1 s2.0 0003484382900225 Main PDFLuis Octavio Quiroz MarambioÎncă nu există evaluări
- Integer Functions and Life ContingenciesDocument31 paginiInteger Functions and Life ContingenciesvenetigreÎncă nu există evaluări
- 0040-5779/85/6402-0765, R 9 1986 Plenum Publishing Corporation 765Document6 pagini0040-5779/85/6402-0765, R 9 1986 Plenum Publishing Corporation 765NadieKJÎncă nu există evaluări
- A Trace Inequality of John Yon Neumann: (Received 12 December 1973)Document4 paginiA Trace Inequality of John Yon Neumann: (Received 12 December 1973)macheng yangÎncă nu există evaluări
- Fourier Transform of Analytic FunctionsDocument2 paginiFourier Transform of Analytic FunctionsRamesh GantiÎncă nu există evaluări
- David Ruet.T. Michael ShubDocument4 paginiDavid Ruet.T. Michael ShubOscar VargasÎncă nu există evaluări
- BF 02760937Document17 paginiBF 02760937ZhukovÎncă nu există evaluări
- Kuramoto ConjectureDocument3 paginiKuramoto Conjecturekwongcp4451Încă nu există evaluări
- Proses Kerja Biasiswazah Mac2016Document2 paginiProses Kerja Biasiswazah Mac2016logen boyÎncă nu există evaluări
- Stress Ratio: 1800 LB 1800 LB 8 in 8 in 14 inDocument1 paginăStress Ratio: 1800 LB 1800 LB 8 in 8 in 14 inlogen boyÎncă nu există evaluări
- And A Kevlar Tent. Presented at The Twenty-Eighth Department of Defense ExplosiveDocument1 paginăAnd A Kevlar Tent. Presented at The Twenty-Eighth Department of Defense Explosivelogen boyÎncă nu există evaluări
- Q2 (1) AaaaaDocument2 paginiQ2 (1) Aaaaalogen boyÎncă nu există evaluări
- Rigid Body Dynamics: Physics Dep., University College CorkDocument10 paginiRigid Body Dynamics: Physics Dep., University College Corklogen boyÎncă nu există evaluări
- LaplaceDocument33 paginiLaplaceravindarsinghÎncă nu există evaluări
- Department of Engineering Mechanics Control Laboratory Laporan Makmal/Laboratory Report Bda37301 Engineering Laboratory ViDocument1 paginăDepartment of Engineering Mechanics Control Laboratory Laporan Makmal/Laboratory Report Bda37301 Engineering Laboratory Vilogen boyÎncă nu există evaluări
- 1.rppeop 28open 29sem12021 28thelatestversion 29Document4 pagini1.rppeop 28open 29sem12021 28thelatestversion 29logen boyÎncă nu există evaluări
- 1.rppeop 28open 29sem12021 28thelatestversion 29Document4 pagini1.rppeop 28open 29sem12021 28thelatestversion 29logen boyÎncă nu există evaluări
- Instruction Open Ended LabDocument3 paginiInstruction Open Ended Lablogen boyÎncă nu există evaluări
- Front CoverDocument1 paginăFront Coverlogen boyÎncă nu există evaluări
- Myfile PPTTDocument1 paginăMyfile PPTTlogen boyÎncă nu există evaluări
- Group Assignment Instruction Sem 1 2018-2019 PDFDocument20 paginiGroup Assignment Instruction Sem 1 2018-2019 PDFlogen boyÎncă nu există evaluări
- 3 Group 3A Group 3B Group 3C Group 3D Group 3E Group 3F: Senarai Pelajar Mengikut Kursus & SeksyenDocument1 pagină3 Group 3A Group 3B Group 3C Group 3D Group 3E Group 3F: Senarai Pelajar Mengikut Kursus & Seksyenlogen boy0% (1)
- MyfilesDocument1 paginăMyfileslogen boyÎncă nu există evaluări
- ProjectileDocument6 paginiProjectileDian Wahyu Nur IvantyÎncă nu există evaluări
- Task 1: Complete The Form Below With Your Notes (From The Research Article Provided)Document3 paginiTask 1: Complete The Form Below With Your Notes (From The Research Article Provided)logen boyÎncă nu există evaluări
- Year Semester Course Code Courses Credit Total: CurriculumDocument2 paginiYear Semester Course Code Courses Credit Total: CurriculumElilragiGanasanÎncă nu există evaluări
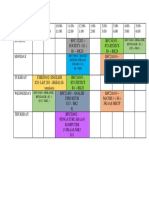
- Timetable LogisDocument1 paginăTimetable Logislogen boyÎncă nu există evaluări
- Year Semester Course Code Courses Credit Total: CurriculumDocument2 paginiYear Semester Course Code Courses Credit Total: CurriculumElilragiGanasanÎncă nu există evaluări
- Myfile PPTTDocument1 paginăMyfile PPTTlogen boyÎncă nu există evaluări
- MyfileDocument1 paginăMyfilelogen boyÎncă nu există evaluări
- MyfilesDocument1 paginăMyfileslogen boyÎncă nu există evaluări
- Using The PN5180 Without Library: Rev. 1.0 - 7 January 2020 Application Note 581710 Company PublicDocument20 paginiUsing The PN5180 Without Library: Rev. 1.0 - 7 January 2020 Application Note 581710 Company PublicvishnurajÎncă nu există evaluări
- 5 PDFDocument116 pagini5 PDFSaranshNinaweÎncă nu există evaluări
- Trust and Reliability: Chap 6Document24 paginiTrust and Reliability: Chap 6Zain AliÎncă nu există evaluări
- Sample Paper G.K.Document20 paginiSample Paper G.K.9sz9rbdhzhÎncă nu există evaluări
- Additional Land Title CaseDocument2 paginiAdditional Land Title CaseAure ReidÎncă nu există evaluări
- Lupang Hinirang - WikipediaDocument46 paginiLupang Hinirang - WikipediaYmeri ResonableÎncă nu există evaluări
- COA 10 March 2020Document2 paginiCOA 10 March 2020Gabriel TalosÎncă nu există evaluări
- Norman Dreyfuss 2016Document17 paginiNorman Dreyfuss 2016Parents' Coalition of Montgomery County, MarylandÎncă nu există evaluări
- DG Document Requirements Reference SheetDocument7 paginiDG Document Requirements Reference SheetJosé Larragaña OsunaÎncă nu există evaluări
- Adjusting Entries For Merchandising (4 Step) : Merchandising Concern Manufacturing ConcernDocument1 paginăAdjusting Entries For Merchandising (4 Step) : Merchandising Concern Manufacturing ConcernyzaÎncă nu există evaluări
- TezpurDocument16 paginiTezpurnandini kalitaÎncă nu există evaluări
- Trusts Reading ListDocument6 paginiTrusts Reading Listtalisha savaridasÎncă nu există evaluări
- Employee Fraud PDFDocument15 paginiEmployee Fraud PDFmanzoorÎncă nu există evaluări
- Datasheet PDFDocument10 paginiDatasheet PDFMohammed AliÎncă nu există evaluări
- Chapter 3 BOND VALUATIONDocument2 paginiChapter 3 BOND VALUATIONBrandon LumibaoÎncă nu există evaluări
- B. Counsel de Parte - A Lawyer Chosen by A Party To RepresentDocument20 paginiB. Counsel de Parte - A Lawyer Chosen by A Party To RepresentPons Mac PacienteÎncă nu există evaluări
- Conjugal Dictatorship Chapter 2Document2 paginiConjugal Dictatorship Chapter 2Nicole Anne Santiago SibuloÎncă nu există evaluări
- TCS 10 Year Financial Statement FinalDocument14 paginiTCS 10 Year Financial Statement Finalgaurav sahuÎncă nu există evaluări
- INTRODUCTION TO ENVIRONMENTAL and NATURA PDFDocument31 paginiINTRODUCTION TO ENVIRONMENTAL and NATURA PDFsuruchi agrawalÎncă nu există evaluări
- Final Paper. Bps.Document13 paginiFinal Paper. Bps.Jonna Fajardo100% (2)
- Edart - Is18037 - R0Document2 paginiEdart - Is18037 - R0Edwin GallegosÎncă nu există evaluări
- Province of Rizal v. Executive SecretaryDocument23 paginiProvince of Rizal v. Executive SecretaryKim MontanoÎncă nu există evaluări
- Black MoneyDocument5 paginiBlack MoneySaanvi GuptaÎncă nu există evaluări
- Microsoft Dynamics AX Lean AccountingDocument26 paginiMicrosoft Dynamics AX Lean AccountingYaowalak Sriburadej100% (2)
- Indian Banking StructureDocument20 paginiIndian Banking Structureneha16septÎncă nu există evaluări
- Ethics AssignmentDocument10 paginiEthics AssignmentRiyad HossainÎncă nu există evaluări