S-ar putea să vă placă și
- Autosar IntroDocument54 paginiAutosar IntroaravindÎncă nu există evaluări
- Automotive Communication Protocols - NewDocument85 paginiAutomotive Communication Protocols - NewSujit KumarÎncă nu există evaluări
- Guidebook To ISO26262Document18 paginiGuidebook To ISO26262Евгений БульбаÎncă nu există evaluări
- Wilmont's DroneTech Project Charter PDFDocument2 paginiWilmont's DroneTech Project Charter PDFhuda mahmoudÎncă nu există evaluări
- Software Crisis in The Automotive IndustryDocument7 paginiSoftware Crisis in The Automotive IndustryLucian Voinea100% (1)
- Diagnostic in Adaptive AUTOSAR HPC Diagnostics: 05 June 2019 Höhenkirchen, GermanyDocument19 paginiDiagnostic in Adaptive AUTOSAR HPC Diagnostics: 05 June 2019 Höhenkirchen, Germanysaika_1982Încă nu există evaluări
- UDS Protocol Implementation in Automotiv PDFDocument6 paginiUDS Protocol Implementation in Automotiv PDFviernes06Încă nu există evaluări
- The Osint Cyber War 2021-02-22Document26 paginiThe Osint Cyber War 2021-02-22Carlos Alberto Mendes BetinhoÎncă nu există evaluări
- Machine Learning Part 8Document42 paginiMachine Learning Part 8Sujit KumarÎncă nu există evaluări
- Module 1 Introduction To ElectronicsDocument4 paginiModule 1 Introduction To ElectronicsAldrin VillanuevaÎncă nu există evaluări
- Implementing Bootloaders On Renesas MCUsDocument37 paginiImplementing Bootloaders On Renesas MCUsJagdeep ArryÎncă nu există evaluări
- Uds ImpDocument6 paginiUds ImppriyaÎncă nu există evaluări
- 000004100Document34 pagini000004100v53Încă nu există evaluări
- AUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsDocument5 paginiAUTOSAR For Dummies - #10 - AUTOSAR and ISO26262 - Automotive ElectronicsSameer KumthekarÎncă nu există evaluări
- Data Sheet ECU-TESTDocument2 paginiData Sheet ECU-TESTmeetbalakumarÎncă nu există evaluări
- BAJA RULES 2020 Rev B 2020-01-26Document129 paginiBAJA RULES 2020 Rev B 2020-01-26baja100% (2)
- Simulink-Targetlink Datatypes Defnt ProblemDocument16 paginiSimulink-Targetlink Datatypes Defnt ProblemmonisivaÎncă nu există evaluări
- From Simulink To Autosar Enabling Autosar Code Generation With Model Based DesignDocument46 paginiFrom Simulink To Autosar Enabling Autosar Code Generation With Model Based Designdeepakdcb20102487Încă nu există evaluări
- Automotive SPICE Process Reference Model: TitleDocument47 paginiAutomotive SPICE Process Reference Model: TitleHoa LuuÎncă nu există evaluări
- Autosar Practical ApplicationDocument135 paginiAutosar Practical ApplicationohmprakashÎncă nu există evaluări
- Simulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsDocument6 paginiSimulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsVijayalaxmi BiradarÎncă nu există evaluări
- Cruise Control SystemDocument20 paginiCruise Control SystemRitesh100% (6)
- TargetLink Product-InformationDocument48 paginiTargetLink Product-Informationmazher_ecÎncă nu există evaluări
- 7.2.5 APQP Phase 2 Checklist Dec 2013Document21 pagini7.2.5 APQP Phase 2 Checklist Dec 2013Mani Rathinam RajamaniÎncă nu există evaluări
- Functional Safety Considerations in Battery DesignDocument6 paginiFunctional Safety Considerations in Battery DesignMarian VerdeÎncă nu există evaluări
- MICROSAR ProductInformation enDocument92 paginiMICROSAR ProductInformation ensrikanthboddunaÎncă nu există evaluări
- Session22-A-SPICE Compliance Made Easy Case Studies and Lessons LearnedDocument49 paginiSession22-A-SPICE Compliance Made Easy Case Studies and Lessons LearnedHaissamÎncă nu există evaluări
- Mohammed M. Windows Forensics Analyst Field Guide... 2023Document318 paginiMohammed M. Windows Forensics Analyst Field Guide... 2023rick.bullard6348Încă nu există evaluări
- Unit 4 SystemDesk 4Document10 paginiUnit 4 SystemDesk 4Farwa ZahidÎncă nu există evaluări
- Full Text 02Document124 paginiFull Text 02AnoopÎncă nu există evaluări
- Function and Software Development For Ecus: Cover StoryDocument6 paginiFunction and Software Development For Ecus: Cover StorypetrishiaÎncă nu există evaluări
- Autosar BasicsDocument13 paginiAutosar Basicsanils469Încă nu există evaluări
- How To Solve Setup & Hold Violations in The Design: PowerDocument20 paginiHow To Solve Setup & Hold Violations in The Design: PowerSujit Kumar100% (1)
- Design Process Hardware Autosar: Present Problems The Autosar StandardDocument3 paginiDesign Process Hardware Autosar: Present Problems The Autosar StandardJnsk SrinuÎncă nu există evaluări
- 09 PlacementDocument48 pagini09 PlacementSujit Kumar100% (1)
- CANape ProductInformation enDocument25 paginiCANape ProductInformation enPaulo CesarÎncă nu există evaluări
- UDS in CAN Flash ProgrammingDocument8 paginiUDS in CAN Flash ProgrammingAshutoshÎncă nu există evaluări
- Power System Loss Analysis-EngDocument5 paginiPower System Loss Analysis-EngRatana KemÎncă nu există evaluări
- AUTOSAR LayeredSoftwareArchitectureDocument46 paginiAUTOSAR LayeredSoftwareArchitectureGiridharÎncă nu există evaluări
- Ecu TestDocument3 paginiEcu TestmeetbalakumarÎncă nu există evaluări
- Lesson19 Autosar PDFDocument170 paginiLesson19 Autosar PDFBura RoxanaÎncă nu există evaluări
- AWS Academy Cloud Foundations Module 05 Student GuideDocument75 paginiAWS Academy Cloud Foundations Module 05 Student GuidevalzÎncă nu există evaluări
- UDS Vehicle Diagnostics in AUTOSAR SoftwareDocument10 paginiUDS Vehicle Diagnostics in AUTOSAR SoftwareEmbitel TechnologiesÎncă nu există evaluări
- Kraemer2008-Model Based Testing of Automotive SystemsDocument10 paginiKraemer2008-Model Based Testing of Automotive SystemssanketÎncă nu există evaluări
- Advanced Driver Assistance Systems (ADAS) Standard RequirementsDe la EverandAdvanced Driver Assistance Systems (ADAS) Standard RequirementsÎncă nu există evaluări
- Autosar RTE LayerDocument1.116 paginiAutosar RTE LayerChethanÎncă nu există evaluări
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocument33 pagini07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaÎncă nu există evaluări
- Autosar Brochure enDocument4 paginiAutosar Brochure enMiha_BucurestiÎncă nu există evaluări
- T-Dplat, TATA ELXSI Diagnostics Platform: Prem Mohan Nair & Sreeraj ADocument5 paginiT-Dplat, TATA ELXSI Diagnostics Platform: Prem Mohan Nair & Sreeraj Acoolman729Încă nu există evaluări
- Autosar PPTDocument10 paginiAutosar PPTRahul WaliÎncă nu există evaluări
- Document Title: Specification of Diagnostics Event ManagerDocument176 paginiDocument Title: Specification of Diagnostics Event ManageryuvarajnarayanasamyÎncă nu există evaluări
- Red Bend Update Car Ecu PDFDocument14 paginiRed Bend Update Car Ecu PDFtomsiriÎncă nu există evaluări
- Autosar Pro ConsDocument8 paginiAutosar Pro ConsYaseen YaseenÎncă nu există evaluări
- Autosar Srs DiagnosticDocument29 paginiAutosar Srs DiagnosticDaoren MiaozhenÎncă nu există evaluări
- D2A1 1 2 ESL Virtual Hardware SetupDocument15 paginiD2A1 1 2 ESL Virtual Hardware SetupRaj Shekhar ReddyÎncă nu există evaluări
- H Da Barth Functional Safety On MulticoreDocument23 paginiH Da Barth Functional Safety On Multicores.b.v.seshagiri1407Încă nu există evaluări
- Security and Safety in Embedded ApplicationsDocument14 paginiSecurity and Safety in Embedded ApplicationsLinh Lê QuangÎncă nu există evaluări
- Dspace-Paper Hil Overview Waeltermann e 160405 PDFDocument14 paginiDspace-Paper Hil Overview Waeltermann e 160405 PDFPranay VermaÎncă nu există evaluări
- Automatic Simulation Measurement and Verification of Inputs and Outputs of Body Control ModuleDocument4 paginiAutomatic Simulation Measurement and Verification of Inputs and Outputs of Body Control ModuleInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Arm Instruction SetDocument61 paginiArm Instruction SetswatidasÎncă nu există evaluări
- Introduction To HIL Simulation - 2Document12 paginiIntroduction To HIL Simulation - 2Kavuri Sai PradeepÎncă nu există evaluări
- Eggine Electronics Management System From ARAIDocument2 paginiEggine Electronics Management System From ARAIdhinesh66Încă nu există evaluări
- Whitepaper 2021 State of Automotive Software Development Survey Results finalqTMdcbRBTon4hNhuQ3SsW52DcmMkCemcZovqfbmEDocument27 paginiWhitepaper 2021 State of Automotive Software Development Survey Results finalqTMdcbRBTon4hNhuQ3SsW52DcmMkCemcZovqfbmEajaydeshpande2001Încă nu există evaluări
- Job Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1Document3 paginiJob Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1krishaÎncă nu există evaluări
- CarMaker WhitepaperDocument9 paginiCarMaker WhitepapersegiropiÎncă nu există evaluări
- Vector XCP Basics enDocument3 paginiVector XCP Basics enthoroftedalÎncă nu există evaluări
- CANoe ProductInformation ENDocument57 paginiCANoe ProductInformation ENpawan waghÎncă nu există evaluări
- Diagnosis For in Vehicle NetworksDocument26 paginiDiagnosis For in Vehicle NetworksSayyedÎncă nu există evaluări
- Diagnostic Communication Manager Module in AUTOSARDocument7 paginiDiagnostic Communication Manager Module in AUTOSARShyam Bhat100% (1)
- Sat 4Document6 paginiSat 4Surya VaitheeswaranÎncă nu există evaluări
- Practice of AUTOSAR China User Group Development of OTA 1634806726Document30 paginiPractice of AUTOSAR China User Group Development of OTA 1634806726vishnuksÎncă nu există evaluări
- Routability Bump DrivenDocument34 paginiRoutability Bump DrivenSujit KumarÎncă nu există evaluări
- PD Evaluation Test 1Document2 paginiPD Evaluation Test 1Sujit KumarÎncă nu există evaluări
- 1.estimate The Pararasitics of A Net Whose Fanout Is 7.: Page Sta Evaluation Test 1Document11 pagini1.estimate The Pararasitics of A Net Whose Fanout Is 7.: Page Sta Evaluation Test 1Sujit Kumar100% (1)
- PD Evaluation TestDocument2 paginiPD Evaluation TestSujit KumarÎncă nu există evaluări
- Advice For Applying Machine Learning: Deciding What To Try NextDocument30 paginiAdvice For Applying Machine Learning: Deciding What To Try NextSujit KumarÎncă nu există evaluări
- Machine Learning Part 9Document33 paginiMachine Learning Part 9Sujit KumarÎncă nu există evaluări
- CMOS BasicDocument11 paginiCMOS BasicSujit KumarÎncă nu există evaluări
- Cts Opt TCLDocument3 paginiCts Opt TCLSujit KumarÎncă nu există evaluări
- Cadence DatasheetDocument1.327 paginiCadence DatasheetSujit KumarÎncă nu există evaluări
- 6WG1 TanıtımDocument17 pagini6WG1 TanıtımHalil KaraÎncă nu există evaluări
- Extra PolarDocument4 paginiExtra Polarraimari brachoÎncă nu există evaluări
- Cummins Power Command IWatch100Document31 paginiCummins Power Command IWatch100Leo BurnsÎncă nu există evaluări
- Spring Batch Tutorial - Reading Information From A FileDocument21 paginiSpring Batch Tutorial - Reading Information From A FileBala KulandaiÎncă nu există evaluări
- Smart Water Vending Machine: A.DIVYA (17S11A0469) V.MAHESH (17S11A0474) A.AMITH (17S11A0468) Mr.J.I.ChakravarthyDocument28 paginiSmart Water Vending Machine: A.DIVYA (17S11A0469) V.MAHESH (17S11A0474) A.AMITH (17S11A0468) Mr.J.I.ChakravarthyDivya AdusumalliÎncă nu există evaluări
- Week3 Modulation BasicsDocument30 paginiWeek3 Modulation BasicsAbdulrahman AlsomaliÎncă nu există evaluări
- Carpool App Case StudyDocument2 paginiCarpool App Case StudyLuh CheeseÎncă nu există evaluări
- Nursing Information System Team Information TechnologyDocument8 paginiNursing Information System Team Information TechnologyCzarina Mae Quinones TadeoÎncă nu există evaluări
- Cummins Gas EngineDocument2 paginiCummins Gas EngineСемен ГассеевÎncă nu există evaluări
- Per 01a - Cargo Pumproom Entry PermitDocument3 paginiPer 01a - Cargo Pumproom Entry PermitRajesh NairÎncă nu există evaluări
- Webhook With WhatsappDocument11 paginiWebhook With WhatsappsarasasasaÎncă nu există evaluări
- Thyristor Voltage Controller - 100494PDocument15 paginiThyristor Voltage Controller - 100494PNishanga SandamalÎncă nu există evaluări
- M4U Home System: We Simplify Management Task For YouDocument2 paginiM4U Home System: We Simplify Management Task For YouVincent 2020Încă nu există evaluări
- Mitsubishi RobotDocument48 paginiMitsubishi RobotdanielÎncă nu există evaluări
- Optima User GuideDocument158 paginiOptima User GuideVikasÎncă nu există evaluări
- FBS ProfileDocument10 paginiFBS ProfilePrashant VahulrajeÎncă nu există evaluări
- Type 2625 and 2625NS Volume BoostersDocument4 paginiType 2625 and 2625NS Volume Boostershamz786Încă nu există evaluări
- Veko Brand VFD Inverter Basic Default Settings and Adjusting InstructionsDocument4 paginiVeko Brand VFD Inverter Basic Default Settings and Adjusting InstructionsNuhj OsohcidÎncă nu există evaluări
- PROJECT NAME: Construction of 380/33kV SWPC 3A BSP: S.No. Item Description Name of Supplier FAT RemarksDocument2 paginiPROJECT NAME: Construction of 380/33kV SWPC 3A BSP: S.No. Item Description Name of Supplier FAT RemarksshahzebÎncă nu există evaluări
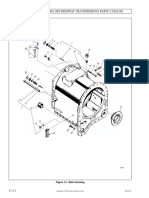
- Allison 5000/6000 Series Off-Highway Transmissions Parts CatalogDocument3 paginiAllison 5000/6000 Series Off-Highway Transmissions Parts CatalogMaya OlmecaÎncă nu există evaluări
- Query BuildingDocument10 paginiQuery Buildingcesar beajaranoÎncă nu există evaluări
- Spencer Kane Kennelly, Exp. Associate: Data Standardization and Master/Reference Data ManagementDocument1 paginăSpencer Kane Kennelly, Exp. Associate: Data Standardization and Master/Reference Data ManagementArjun GhattamneniÎncă nu există evaluări