S-ar putea să vă placă și
- Computing The QR FactorizationDocument3 paginiComputing The QR FactorizationTahzeeb AhmedÎncă nu există evaluări
- 2 B21 Sheet 2 ADocument2 pagini2 B21 Sheet 2 ARoy VeseyÎncă nu există evaluări
- Spring 2017 Homework 9Document30 paginiSpring 2017 Homework 9Rodger PangÎncă nu există evaluări
- 2 B21 Sheet 4 ADocument4 pagini2 B21 Sheet 4 ARoy VeseyÎncă nu există evaluări
- Ricki ChivoDocument2 paginiRicki ChivoElkin NeiraÎncă nu există evaluări
- Vidu 2Document1 paginăVidu 2chunguyenthaisonÎncă nu există evaluări
- List of Formulae: t= ¯ x−μ s/ nDocument2 paginiList of Formulae: t= ¯ x−μ s/ nWahib NadeemÎncă nu există evaluări
- Item 3 Part 1Document2 paginiItem 3 Part 1Jomar RabajanteÎncă nu există evaluări
- L12 Eigenvalue of Symmteric MatricesDocument6 paginiL12 Eigenvalue of Symmteric MatricesVVBÎncă nu există evaluări
- EquationsDocument1 paginăEquationsSurulivelrajantÎncă nu există evaluări
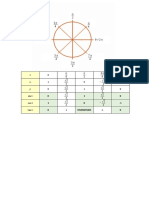
- Unit CircleDocument4 paginiUnit CircleAngeli MercedÎncă nu există evaluări
- ResoluciónDocument4 paginiResoluciónjossueprado7Încă nu există evaluări
- Tugas Statistics 29 JulyDocument8 paginiTugas Statistics 29 Julytri septianiÎncă nu există evaluări
- Trabajo Calculo AlejaDocument2 paginiTrabajo Calculo AlejaQuiroga AlejandraÎncă nu există evaluări
- H T D B T M: Ypothesis Ests FOR Ifference Etween WO EansDocument3 paginiH T D B T M: Ypothesis Ests FOR Ifference Etween WO EansRein BulahaoÎncă nu există evaluări
- 2023spring CAL WK1 THR v3Document11 pagini2023spring CAL WK1 THR v3권종욱Încă nu există evaluări
- Recitation Worksheet 2 Matrices 1. Compute The Products 1 2 - 1 1 × 5 6 2 0 and 5 6 2 0 × 1 2 - 1 1Document2 paginiRecitation Worksheet 2 Matrices 1. Compute The Products 1 2 - 1 1 × 5 6 2 0 and 5 6 2 0 × 1 2 - 1 1AnanthÎncă nu există evaluări
- Mathematics 16spr-M2solsDocument15 paginiMathematics 16spr-M2solsIves LeeÎncă nu există evaluări
- pt1 0Document3 paginipt1 0Joshua UchiyamaÎncă nu există evaluări
- Quiz3 QM2015 SolnDocument5 paginiQuiz3 QM2015 SolnMena AwanÎncă nu există evaluări
- Confidence Interval For Different of Mean: X X Z N NDocument1 paginăConfidence Interval For Different of Mean: X X Z N Nain najwaÎncă nu există evaluări
- Solucionario N.º 01 Mecanica de Medios Continuos (C503) PROBLEMA 1: (6 Puntos)Document12 paginiSolucionario N.º 01 Mecanica de Medios Continuos (C503) PROBLEMA 1: (6 Puntos)Ana Julia Becerra HernandezÎncă nu există evaluări
- Tarea - Integrales IrracionalesDocument1 paginăTarea - Integrales IrracionalesEDGAR SOLISÎncă nu există evaluări
- bài dịch thuậtDocument3 paginibài dịch thuậtJustin Achilles AlexandreÎncă nu există evaluări
- Steps in Hypothesis Testing Using The ZDocument1 paginăSteps in Hypothesis Testing Using The ZGener GorospeÎncă nu există evaluări
- Mate gc21.11.2023Document2 paginiMate gc21.11.2023Mihail TerteaÎncă nu există evaluări
- FinalDocument9 paginiFinalRaquel MañacapÎncă nu există evaluări
- H T D B T M: Ypothesis Ests FOR Ifference Etween WO EansDocument2 paginiH T D B T M: Ypothesis Ests FOR Ifference Etween WO EansRein BulahaoÎncă nu există evaluări
- Alpha-Beta TransformationDocument3 paginiAlpha-Beta TransformationM_Rocha0% (1)
- 19 - 19201006 - 03 - Asif Mosharrof HossainDocument8 pagini19 - 19201006 - 03 - Asif Mosharrof HossainShahadat HossainÎncă nu există evaluări
- Heat Transfer 2nd Ed. by Cengel-647Document1 paginăHeat Transfer 2nd Ed. by Cengel-647Gifted MouhcineÎncă nu există evaluări
- GENERAL MATHEMATICS Answer KeyDocument13 paginiGENERAL MATHEMATICS Answer Keykristine RemolazoÎncă nu există evaluări
- Report TitleDocument10 paginiReport Titlenermen wasfyÎncă nu există evaluări
- Image Compression Using SVD PDFDocument7 paginiImage Compression Using SVD PDFMariam HossamÎncă nu există evaluări
- IMF Final 2022Document6 paginiIMF Final 2022SamÎncă nu există evaluări
- Tarea 11Document6 paginiTarea 11Yole HerediaÎncă nu există evaluări
- 1 The Black-Scholes Formula For A European Call or Put: 1.1 Evaluation of European OptionsDocument15 pagini1 The Black-Scholes Formula For A European Call or Put: 1.1 Evaluation of European Optionshenry37302Încă nu există evaluări
- Worksheet-Inverse Trigonometric FunctionsDocument2 paginiWorksheet-Inverse Trigonometric FunctionsLeigh YahÎncă nu există evaluări
- FEFCO Recommendation No 107Document5 paginiFEFCO Recommendation No 107arceppÎncă nu există evaluări
- 2 2 π/6 i2t ∞ − ztDocument7 pagini2 2 π/6 i2t ∞ − ztAmiin HirphoÎncă nu există evaluări
- Solusi Soal Bab 4Document9 paginiSolusi Soal Bab 4SatriaÎncă nu există evaluări
- SOLUCIÓN ReposicionDocument11 paginiSOLUCIÓN Reposicionnicolas cataño4512Încă nu există evaluări
- Assignment 8 SolutionsDocument4 paginiAssignment 8 Solutionssafyh2005Încă nu există evaluări
- MathDocument2 paginiMathrahimhulk89Încă nu există evaluări
- AppendixDocument4 paginiAppendixlilinopal511Încă nu există evaluări
- Probability Unit 4Document20 paginiProbability Unit 4bad guy100% (1)
- Geometric Sequence, Means and Series Ex. 1, 2, 4, 8, 16, 32, 64, 128, 256, 512 The Common Ratio R 2Document8 paginiGeometric Sequence, Means and Series Ex. 1, 2, 4, 8, 16, 32, 64, 128, 256, 512 The Common Ratio R 2Mica MellizoÎncă nu există evaluări
- ExerciseDocument3 paginiExerciseThùy Dung TrầnÎncă nu există evaluări
- W'F LM T' A WL' Tyl Ayra R SDocument76 paginiW'F LM T' A WL' Tyl Ayra R SArwa AlabdulkarimÎncă nu există evaluări
- Solution Quiz 2 Robotics BEE 7C 11112023 055956pmDocument1 paginăSolution Quiz 2 Robotics BEE 7C 11112023 055956pmAHSAN HAMEEDÎncă nu există evaluări
- Math 4023 Tutorial Notes 12Document3 paginiMath 4023 Tutorial Notes 12John ChanÎncă nu există evaluări
- CS103X: Discrete Structures Homework Assignment 1: SolutionsDocument9 paginiCS103X: Discrete Structures Homework Assignment 1: SolutionsMichel MagnaÎncă nu există evaluări
- GreeksDocument1 paginăGreeksAnton SimanenkaÎncă nu există evaluări
- Formulas For Math 423 Final ExamDocument3 paginiFormulas For Math 423 Final ExamJake FeldmanÎncă nu există evaluări
- Tutorial 5 AnswersDocument5 paginiTutorial 5 AnswersFrantz ClermontÎncă nu există evaluări
- 2009 KeyDocument9 pagini2009 KeySfg fghÎncă nu există evaluări
- Edexcel GCE Core 2 Mathematics C2 Advanced Subsidary Jun 2007 6664 Mark SchemeDocument11 paginiEdexcel GCE Core 2 Mathematics C2 Advanced Subsidary Jun 2007 6664 Mark Schemerainman875Încă nu există evaluări
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesDe la EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesEvaluare: 1.5 din 5 stele1.5/5 (2)
- Test Bank for Precalculus: Functions & GraphsDe la EverandTest Bank for Precalculus: Functions & GraphsEvaluare: 5 din 5 stele5/5 (1)
- Gaussian EliminationDocument79 paginiGaussian EliminationAnonymous m4MF1gÎncă nu există evaluări
- Portfolio For Module 2Document46 paginiPortfolio For Module 2Alyssa Sarah ArenasÎncă nu există evaluări
- Approximation PDFDocument26 paginiApproximation PDFNipun HarshaÎncă nu există evaluări
- IntroToOR SolutionsDocument84 paginiIntroToOR SolutionsSamantha Marie RebolledoÎncă nu există evaluări
- ES272 ch4bDocument18 paginiES272 ch4btarafe5509Încă nu există evaluări
- 2.algebraic Expressions (Special Products and Factoring)Document21 pagini2.algebraic Expressions (Special Products and Factoring)Jake Carlo WongÎncă nu există evaluări
- GurobiDocument16 paginiGurobiZewum KuÎncă nu există evaluări
- Find The Optimal Solution To The Linear Programming Model With He Integer Restrictions RelaxedDocument10 paginiFind The Optimal Solution To The Linear Programming Model With He Integer Restrictions RelaxedCher NaÎncă nu există evaluări
- Lect 6Document20 paginiLect 6AmalAbdlFattahÎncă nu există evaluări
- Algebra Revision Assignment 1Document5 paginiAlgebra Revision Assignment 1Deepak KanchanÎncă nu există evaluări
- Lesson 1.4 Domain and Range of Functions PDFDocument36 paginiLesson 1.4 Domain and Range of Functions PDFhi mynameÎncă nu există evaluări
- Investigate and Compare Analysis Method of Hammerhead Bridge Pier CapsDocument19 paginiInvestigate and Compare Analysis Method of Hammerhead Bridge Pier CapsSAHIL SHAIKHÎncă nu există evaluări
- CA427 RsmexampleDocument3 paginiCA427 RsmexamplePriyanka GargÎncă nu există evaluări
- Thesis Sameer MuslehDocument157 paginiThesis Sameer Muslehyelinelif1993Încă nu există evaluări
- Newton's Forward & Backward PPT'sDocument21 paginiNewton's Forward & Backward PPT'sS Adilakshmi67% (3)
- A Computational Study With Finite Element Method ADocument21 paginiA Computational Study With Finite Element Method AEisten Daniel Neto BombaÎncă nu există evaluări
- 03 Graphical MethodDocument20 pagini03 Graphical Methodriya lakhotiaÎncă nu există evaluări
- Cutting GGDocument152 paginiCutting GGGizem BuminÎncă nu există evaluări
- Graphical Method Calculator2020Document3 paginiGraphical Method Calculator2020Hasun MalingaÎncă nu există evaluări
- Taylor and Maclaurin Series (Ol) Dehwk:RrgDocument5 paginiTaylor and Maclaurin Series (Ol) Dehwk:RrgJosé MendozaÎncă nu există evaluări
- IX Optimizaci N en La Planificaci N MineraDocument30 paginiIX Optimizaci N en La Planificaci N MineraFabian JadueÎncă nu există evaluări
- Lecture 5 - Solving Systems of Linear Equations (Gauss-Jordan Elimination Method)Document8 paginiLecture 5 - Solving Systems of Linear Equations (Gauss-Jordan Elimination Method)Mark Joseph PanongÎncă nu există evaluări
- Taylor Series Method, Euler's Method and Modified Euler's MethodDocument8 paginiTaylor Series Method, Euler's Method and Modified Euler's MethodSourav PaulÎncă nu există evaluări
- Searching For Homogeneity Across Multi-Variable Polynomials: 1 TheoryDocument7 paginiSearching For Homogeneity Across Multi-Variable Polynomials: 1 TheoryAlexander MarinovÎncă nu există evaluări
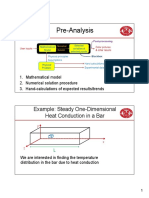
- Pre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarDocument12 paginiPre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarJhuliani CristinaÎncă nu există evaluări
- 1 Matrix Inversion by Gauss Jordan EliminationDocument6 pagini1 Matrix Inversion by Gauss Jordan EliminationSphinx RainxÎncă nu există evaluări
- National University Manila, Philippines College of Business & AccountancyDocument3 paginiNational University Manila, Philippines College of Business & AccountancyDandelenne GepilanoÎncă nu există evaluări
- Part 2Document10 paginiPart 2Sudhagar KingÎncă nu există evaluări
- Computer Assignment1Document2 paginiComputer Assignment1Aryann kumarÎncă nu există evaluări
- RS1094 Final Opational Maths Grade 9 PDFDocument273 paginiRS1094 Final Opational Maths Grade 9 PDFTechnical DorunaÎncă nu există evaluări