S-ar putea să vă placă și
- IMSD2018 Full Paper 206Document17 paginiIMSD2018 Full Paper 206Mahmoud KaramÎncă nu există evaluări
- Dynamics of In-Line Six-Cylinder Diesel Engine With Rubber DamperDocument10 paginiDynamics of In-Line Six-Cylinder Diesel Engine With Rubber DamperkspetsnazÎncă nu există evaluări
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 paginiUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssÎncă nu există evaluări
- Art. AndreassonDocument7 paginiArt. AndreassonENIC-AITCGÎncă nu există evaluări
- Machine Tools Mechatronic AnalysisDocument10 paginiMachine Tools Mechatronic AnalysisAndrisan CatalinÎncă nu există evaluări
- Mechatronics 2003Document6 paginiMechatronics 2003SashankSashankÎncă nu există evaluări
- Machines 09 00245 v2Document34 paginiMachines 09 00245 v2Martí carboÎncă nu există evaluări
- Etextbook PDF For Kinematics and Dynamics of Machines 2nd EditionDocument61 paginiEtextbook PDF For Kinematics and Dynamics of Machines 2nd Editionjohn.garcia701100% (46)
- Câmbio CVT Explicação Força Centrífuga Molas ExcelenteDocument23 paginiCâmbio CVT Explicação Força Centrífuga Molas ExcelenteGardenia AndradeÎncă nu există evaluări
- Bus Body PDFDocument5 paginiBus Body PDFjohnsonÎncă nu există evaluări
- Advanced Mechatronic Design Using A Multi-Objective Genetic Algorithm Optimization of A Motor-Driven Four-Bar SystemDocument12 paginiAdvanced Mechatronic Design Using A Multi-Objective Genetic Algorithm Optimization of A Motor-Driven Four-Bar SystemMauricio VillalobosÎncă nu există evaluări
- Landing GearDocument12 paginiLanding GearcmpmarinhoÎncă nu există evaluări
- Twu GM Final 3232012Document10 paginiTwu GM Final 3232012matmeanÎncă nu există evaluări
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 paginiAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryÎncă nu există evaluări
- Rbtic ArmDocument18 paginiRbtic ArmmnervadesuÎncă nu există evaluări
- t1 1 A Automotive 011Document13 paginit1 1 A Automotive 011rohit koraleÎncă nu există evaluări
- Improved Bushing Models For General Multibody Systems and Vehicle DynamicsDocument25 paginiImproved Bushing Models For General Multibody Systems and Vehicle DynamicsAlfoilÎncă nu există evaluări
- Mechatronics: Luca Bascetta, Paolo Rocco, Andrea Maria Zanchettin, Gianantonio MagnaniDocument10 paginiMechatronics: Luca Bascetta, Paolo Rocco, Andrea Maria Zanchettin, Gianantonio MagnaniJolito RamosÎncă nu există evaluări
- A Report On Compliant MechanismsDocument22 paginiA Report On Compliant MechanismsRajesh Shyamrao KajeÎncă nu există evaluări
- A Simplified Dynamic Model For Front-End Loader Design: M D WorleyDocument19 paginiA Simplified Dynamic Model For Front-End Loader Design: M D WorleyEric CÎncă nu există evaluări
- A Simplified Dynamic Model For Front-End Loader Design: M D WorleyDocument19 paginiA Simplified Dynamic Model For Front-End Loader Design: M D WorleyKevinCollenÎncă nu există evaluări
- Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor With Low Torque RippleDocument20 paginiFlux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor With Low Torque RippleMt GolesÎncă nu există evaluări
- Iowtc2022 98217Document10 paginiIowtc2022 98217Quién SabeÎncă nu există evaluări
- 1 s2.0 S0957415809001585 MainDocument17 pagini1 s2.0 S0957415809001585 MainLeila JoudiÎncă nu există evaluări
- Design Multistage External Gear Pumps For Dry SumpDocument11 paginiDesign Multistage External Gear Pumps For Dry SumpCHAVHAN NAYANÎncă nu există evaluări
- Acc 2014 6858933Document7 paginiAcc 2014 6858933mohammad ghaderzadehÎncă nu există evaluări
- Explicit Nonlinear Model Predictive ControlDocument14 paginiExplicit Nonlinear Model Predictive ControlAlex ShaaaÎncă nu există evaluări
- Mikroniek - 2010 6 4Document6 paginiMikroniek - 2010 6 4M.J.W.Încă nu există evaluări
- Dynamic Simulation of IC Engine PDFDocument3 paginiDynamic Simulation of IC Engine PDFKannan MuthusamyÎncă nu există evaluări
- Active Lateral Suspension For High Speed Trains World Congress On Railway Research 2001Document45 paginiActive Lateral Suspension For High Speed Trains World Congress On Railway Research 2001Rafif WirareswaraÎncă nu există evaluări
- Speed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsDocument10 paginiSpeed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsnhatvpÎncă nu există evaluări
- Lightweight GantryDocument16 paginiLightweight GantryabhayuietÎncă nu există evaluări
- Modelling Steel and Composite StructuresDocument8 paginiModelling Steel and Composite StructuresChan Pisith de PhalÎncă nu există evaluări
- Yoke MechanismDocument25 paginiYoke MechanismNethaji Tr100% (1)
- The Multibody Systems Approach to Vehicle DynamicsDe la EverandThe Multibody Systems Approach to Vehicle DynamicsEvaluare: 5 din 5 stele5/5 (2)
- Vehicle Modeling Using BGDocument11 paginiVehicle Modeling Using BGDanish MoinÎncă nu există evaluări
- Tak 2020Document18 paginiTak 2020shahin mirzaeiÎncă nu există evaluări
- Comparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric VehicleDocument6 paginiComparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric Vehiclejin11004Încă nu există evaluări
- Article MechanismMachineTheory Budinger PDFDocument17 paginiArticle MechanismMachineTheory Budinger PDFfei312chenÎncă nu există evaluări
- A Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisDocument11 paginiA Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisNgoc Thang NguyenÎncă nu există evaluări
- Machines 11 00009 v3Document27 paginiMachines 11 00009 v3sumeetsaini88Încă nu există evaluări
- Methodology For Cage Shape Optimization of A Permanent Magnet Synchronous Motor Under Line Start ConditionsDocument4 paginiMethodology For Cage Shape Optimization of A Permanent Magnet Synchronous Motor Under Line Start ConditionsHamza farooqÎncă nu există evaluări
- Ijmet 11 01 012Document7 paginiIjmet 11 01 012Thraia AlcazarÎncă nu există evaluări
- Simulation and Animation of Mechanical Systems: HUMUSOFT, Prague, Czech RepublicDocument11 paginiSimulation and Animation of Mechanical Systems: HUMUSOFT, Prague, Czech RepublicIrawan MalikÎncă nu există evaluări
- Virtual Prototyping of An Electric Power Steering SimulatorDocument10 paginiVirtual Prototyping of An Electric Power Steering SimulatorBalajiÎncă nu există evaluări
- Vehicle Collision Dynamics: Analysis and ReconstructionDe la EverandVehicle Collision Dynamics: Analysis and ReconstructionÎncă nu există evaluări
- Modelling Flexible Parts For Virtual Reality Assembly SimulationDocument10 paginiModelling Flexible Parts For Virtual Reality Assembly SimulationFeby AbrahamÎncă nu există evaluări
- Energies 15 08323Document38 paginiEnergies 15 08323Bia HaithemÎncă nu există evaluări
- Parametric Finite Element Model of AIRBUS Engine Pylon With MSC - PatranDocument9 paginiParametric Finite Element Model of AIRBUS Engine Pylon With MSC - Patranventus45Încă nu există evaluări
- Nmce, PethDocument54 paginiNmce, PethAKSHAY NANGARE-PATILÎncă nu există evaluări
- Tire Road FrictionDocument9 paginiTire Road Frictionamansax77Încă nu există evaluări
- Dynamic Modeling of Robotic Manipulators For Accuracy EvaluationDocument7 paginiDynamic Modeling of Robotic Manipulators For Accuracy Evaluationyemane g.michalÎncă nu există evaluări
- About The Preliminary Design of The Suspension SPRDocument7 paginiAbout The Preliminary Design of The Suspension SPRalinÎncă nu există evaluări
- CAD-Based Parametric Cross-Section Designer For Gas Turbine Engine MDO ApplicationsDocument10 paginiCAD-Based Parametric Cross-Section Designer For Gas Turbine Engine MDO ApplicationsValiyakattel NilsÎncă nu există evaluări
- 11 Chapter 02 PDFDocument28 pagini11 Chapter 02 PDFjoel perieraÎncă nu există evaluări
- An Improved Particle Swarm Optimization AlgorithmDocument11 paginiAn Improved Particle Swarm Optimization AlgorithmOussama AkrmiÎncă nu există evaluări
- Multi Link Suspension OptimizationDocument11 paginiMulti Link Suspension OptimizationAlex Bradley100% (1)
- A Performance-Driven MPC Algorithm For Underactuated Bridge CranesDocument17 paginiA Performance-Driven MPC Algorithm For Underactuated Bridge CranesGogyÎncă nu există evaluări
- Open Mathematics: Black-Scholes Equation and The Delta Hedge of The European Option Under Skew Brownian MotionDocument10 paginiOpen Mathematics: Black-Scholes Equation and The Delta Hedge of The European Option Under Skew Brownian MotionDavide MaranoÎncă nu există evaluări
- CHENG Gear Tooth GeometryDocument11 paginiCHENG Gear Tooth GeometryDavide MaranoÎncă nu există evaluări
- Open Mathematics: Statistical ($/alpha ,/varphi) $-ConnectionsDocument11 paginiOpen Mathematics: Statistical ($/alpha ,/varphi) $-ConnectionsDavide MaranoÎncă nu există evaluări
- My Foolish Heart Transcript PDFDocument3 paginiMy Foolish Heart Transcript PDFDavide Marano100% (1)
- 8 ?5 @A7 Ÿ B Cadÿ Efÿ 7 G67 5:Ÿ Ehbf Hfÿ: 8Ÿ Eiÿ ?5 at Ÿ K:?Ÿ Elÿ 7 G67 5:Ÿ EhbfDocument2 pagini8 ?5 @A7 Ÿ B Cadÿ Efÿ 7 G67 5:Ÿ Ehbf Hfÿ: 8Ÿ Eiÿ ?5 at Ÿ K:?Ÿ Elÿ 7 G67 5:Ÿ EhbfDavide MaranoÎncă nu există evaluări
- The Effect of Center Distance Change On Gear Teeth EngagementDocument21 paginiThe Effect of Center Distance Change On Gear Teeth EngagementDavide MaranoÎncă nu există evaluări
- Sound System Design - 1Document89 paginiSound System Design - 1Davide MaranoÎncă nu există evaluări
- U2 04 04Document30 paginiU2 04 04Davide MaranoÎncă nu există evaluări
- GT 0916Document84 paginiGT 0916Davide MaranoÎncă nu există evaluări
- Rating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDocument6 paginiRating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDavide MaranoÎncă nu există evaluări
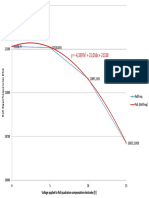
- Roll Eigenfrequencies Interpolation: Voltage Applied To Roll Quadrature Compensation Electrodes (V)Document1 paginăRoll Eigenfrequencies Interpolation: Voltage Applied To Roll Quadrature Compensation Electrodes (V)Davide MaranoÎncă nu există evaluări
- Modeling of A Three-Axes MEMS Gyroscope With Feedforward PI Quadrature CompensationDocument10 paginiModeling of A Three-Axes MEMS Gyroscope With Feedforward PI Quadrature CompensationDavide MaranoÎncă nu există evaluări
- Odeon ManualDocument195 paginiOdeon ManualDavide MaranoÎncă nu există evaluări
- Mems TransducersDocument21 paginiMems TransducersDavide MaranoÎncă nu există evaluări
- Umass Lowell Computer Science 91.503: Graduate AlgorithmsDocument46 paginiUmass Lowell Computer Science 91.503: Graduate AlgorithmsShivam AtriÎncă nu există evaluări
- Constant Effort SupportsDocument31 paginiConstant Effort SupportsKen SidhartaÎncă nu există evaluări
- 3 IntroductionDocument5 pagini3 IntroductionKhamvanh PhengnaoneÎncă nu există evaluări
- Electrical and Electronic Measurements and InstrumentationDocument12 paginiElectrical and Electronic Measurements and InstrumentationKarthik VÎncă nu există evaluări
- Insta Grid Products PamphletDocument2 paginiInsta Grid Products PamphletShawn Paul BoikeÎncă nu există evaluări
- 4x & 6x Night Vision Weapon Sights Operator ManualDocument15 pagini4x & 6x Night Vision Weapon Sights Operator Manualakms1982Încă nu există evaluări
- Material Balance: Lecture By: Ir. Dewi Tristantini Mt. Phd. University of IndonesiaDocument29 paginiMaterial Balance: Lecture By: Ir. Dewi Tristantini Mt. Phd. University of IndonesiaEdward Gustaf100% (3)
- t9 PDFDocument21 paginit9 PDFselvaganapathy1992Încă nu există evaluări
- 1 - Pdfsam - 51 - Pdfsam - Jane Bennett Vibrant Matter A Political Ecology of Things 2010 PDFDocument25 pagini1 - Pdfsam - 51 - Pdfsam - Jane Bennett Vibrant Matter A Political Ecology of Things 2010 PDFAnna PrzytomskaÎncă nu există evaluări
- 2nd PUC Question Papers Physics 2006-2010Document21 pagini2nd PUC Question Papers Physics 2006-2010Mohan Kumar P100% (1)
- Lab 6 Translating Solving EquationsDocument8 paginiLab 6 Translating Solving Equationsapi-389057247Încă nu există evaluări
- Solutions To Practice Problems, Module 3: Engineering MechanicsDocument13 paginiSolutions To Practice Problems, Module 3: Engineering MechanicsShaun Patrick AlbaoÎncă nu există evaluări
- Long Range Acoustic DeviceDocument2 paginiLong Range Acoustic Devicebingwazzup100% (2)
- Chul Park The Limits of Two-Temperature ModelDocument13 paginiChul Park The Limits of Two-Temperature ModellazharÎncă nu există evaluări
- Least Cost PathDocument29 paginiLeast Cost PathGaneshan ParamathmaÎncă nu există evaluări
- Cohesive Energy 1Document5 paginiCohesive Energy 1kalloliÎncă nu există evaluări
- Report WritingDocument24 paginiReport WritingVasudevanÎncă nu există evaluări
- False-Position Method of Solving A Nonlinear Equation: Exact RootDocument6 paginiFalse-Position Method of Solving A Nonlinear Equation: Exact Rootmacynthia26Încă nu există evaluări
- Introduction To Vehicle Electronic Systems and Fault DiagnosisDocument20 paginiIntroduction To Vehicle Electronic Systems and Fault Diagnosisyogita patil100% (1)
- Experiences of ISFOC On Concentration Photovoltaic: Francisca RubioDocument49 paginiExperiences of ISFOC On Concentration Photovoltaic: Francisca RubioHikary AcevesÎncă nu există evaluări
- Modified Moment Estimation For A Two Parameter Gamma DistributionDocument9 paginiModified Moment Estimation For A Two Parameter Gamma DistributionInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- AppNote 07 FPSO and Offshore PlatformsDocument4 paginiAppNote 07 FPSO and Offshore PlatformsRao MadepalliÎncă nu există evaluări
- Volumetric Efficiency: Object: To TheoryDocument3 paginiVolumetric Efficiency: Object: To Theoryahmad shaheenÎncă nu există evaluări
- Positioning of Air Cooled CondensersDocument9 paginiPositioning of Air Cooled CondensersAlexÎncă nu există evaluări
- RT Finalpresenatation08 161118104713Document56 paginiRT Finalpresenatation08 161118104713sajay2010Încă nu există evaluări
- BlastingDocument138 paginiBlastingcklconÎncă nu există evaluări
- Leica ICD Brochure enDocument4 paginiLeica ICD Brochure enCsaba GibártiÎncă nu există evaluări
- Dss Question Bank 2022Document7 paginiDss Question Bank 2022vcb57xbtd5Încă nu există evaluări
- An Introduction To Proteomics: The Protein Complement of The GenomeDocument40 paginiAn Introduction To Proteomics: The Protein Complement of The GenomeJohn Louie BarquerosÎncă nu există evaluări
- Tank Design CalculationDocument20 paginiTank Design CalculationHairil HerliansyahÎncă nu există evaluări