S-ar putea să vă placă și
- Tor and Deep Web Secrets PDFDocument127 paginiTor and Deep Web Secrets PDFOssas One100% (8)
- Kinematics of Mechanisms from the Time of WattDe la EverandKinematics of Mechanisms from the Time of WattEvaluare: 5 din 5 stele5/5 (2)
- Epicyclic Gearing and The Antikythera Mechanism PT 1 A.H. MaDocument10 paginiEpicyclic Gearing and The Antikythera Mechanism PT 1 A.H. Maantikythera_fanÎncă nu există evaluări
- (History of Mechanism and Machine Science 04) International Symposium On History of Machines and Mechanisms - Proceedings of HMM 2008Document386 pagini(History of Mechanism and Machine Science 04) International Symposium On History of Machines and Mechanisms - Proceedings of HMM 2008YUDY LILIA TORRES CHANGANAÎncă nu există evaluări
- Vdocuments - MX - Classical Mechanics With Mathematica PDFDocument523 paginiVdocuments - MX - Classical Mechanics With Mathematica PDFOrlando Baca100% (2)
- Mechanisms IllustrationsDocument310 paginiMechanisms IllustrationsManea Grosu100% (2)
- R. Wittkower Architectural Principles Age of Humanism Influence On Modern ArchitectureDocument9 paginiR. Wittkower Architectural Principles Age of Humanism Influence On Modern ArchitectureRazvan LuscovÎncă nu există evaluări
- 5G Bootcamp Day 2-Building 5G System PDFDocument18 pagini5G Bootcamp Day 2-Building 5G System PDFfjwoemcuÎncă nu există evaluări
- Modelos de Reuleaux en Impresoras 3DDocument22 paginiModelos de Reuleaux en Impresoras 3DdariosandroneÎncă nu există evaluări
- 3D Printing of MechanismDocument22 pagini3D Printing of MechanismKwanÎncă nu există evaluări
- Synthesis of Linkages Assignment 1Document5 paginiSynthesis of Linkages Assignment 1Gabrielle EkhasomhiÎncă nu există evaluări
- Picturing Machines 1400-1700Document6 paginiPicturing Machines 1400-1700Anonymous mKdAfWif0% (1)
- Artículo 2. Systems Theory, Theory of Chaos, EmergenceDocument14 paginiArtículo 2. Systems Theory, Theory of Chaos, EmergenceIVAN DE LA CRUZ GUILLENÎncă nu există evaluări
- Drawing Mechanics - M.SDocument17 paginiDrawing Mechanics - M.Sadrip01Încă nu există evaluări
- Mind EllDocument23 paginiMind Ellcamila chinchillaÎncă nu există evaluări
- Lecture1 Introduction PDFDocument19 paginiLecture1 Introduction PDFAmartya MondalÎncă nu există evaluări
- MIT16 07F09 Lec01Document2 paginiMIT16 07F09 Lec01soulsellÎncă nu există evaluări
- 2005 3-D Printing The History of MechanismsDocument5 pagini2005 3-D Printing The History of MechanismsOstrogradski Sacks AlembertÎncă nu există evaluări
- Mechanical Engineering PDFDocument5 paginiMechanical Engineering PDFhardikpandya20Încă nu există evaluări
- Garber. Descartes, Mechanics, and The Mechanical PhilosophyDocument20 paginiGarber. Descartes, Mechanics, and The Mechanical PhilosophyfilosofiacartesianaÎncă nu există evaluări
- Early Modern Machine DrawingsDocument32 paginiEarly Modern Machine DrawingsJuan Jose TirigallÎncă nu există evaluări
- 978-3-031-39872-8Document354 pagini978-3-031-39872-8qiaoxingliuÎncă nu există evaluări
- Movement Equations 1: Location, Kinematics and KineticsDe la EverandMovement Equations 1: Location, Kinematics and KineticsÎncă nu există evaluări
- Chapter 2Document20 paginiChapter 2yaaawÎncă nu există evaluări
- ArchimedesDocument8 paginiArchimedesRubénGómezMÎncă nu există evaluări
- Automatic Control Engineering: Assignment IDocument4 paginiAutomatic Control Engineering: Assignment IArjun SadanandÎncă nu există evaluări
- TCV 4213 Analysis of Structures OneDocument22 paginiTCV 4213 Analysis of Structures OnePatrick MachariaÎncă nu există evaluări
- Assignment 1 ASADocument9 paginiAssignment 1 ASALowel Jay DegamonÎncă nu există evaluări
- New Directions in Dynamical Systems, Automatic Control and Singular PerturbationsDe la EverandNew Directions in Dynamical Systems, Automatic Control and Singular PerturbationsÎncă nu există evaluări
- Cities in TransformationDocument4 paginiCities in TransformationPanos MinopoulosÎncă nu există evaluări
- Synthesis of Epicyclic Gear TrainsDocument40 paginiSynthesis of Epicyclic Gear TrainsAshok DargarÎncă nu există evaluări
- Mechanical EngineeringDocument2 paginiMechanical EngineeringBabar RaufÎncă nu există evaluări
- Introduction To Structural Analysis2-1Document27 paginiIntroduction To Structural Analysis2-1kaisser091202Încă nu există evaluări
- история радараDocument19 paginiистория радараНатали СмитÎncă nu există evaluări
- Pengantar Teknik MesinDocument5 paginiPengantar Teknik Mesin'biyandd NTuu AKkuu'Încă nu există evaluări
- Kinematic Design and Description of Industrial Robotic Chains PDFDocument36 paginiKinematic Design and Description of Industrial Robotic Chains PDFkwastekÎncă nu există evaluări
- History of Mechanical EngineeringDocument4 paginiHistory of Mechanical Engineeringkate trishaÎncă nu există evaluări
- New Monu (Full Doc)Document76 paginiNew Monu (Full Doc)MONUPRIYA.M.K 17BCO334Încă nu există evaluări
- Machine - Wikipedia, The Free Encyclopedia PDFDocument8 paginiMachine - Wikipedia, The Free Encyclopedia PDFakr_659Încă nu există evaluări
- MachineDocument12 paginiMachinemanuelaristotleÎncă nu există evaluări
- Tensegrity SistemsDocument9 paginiTensegrity SistemsAdrian NairdaÎncă nu există evaluări
- Lab Report: Exploration of The Working Principle of Pantograph MechanismDocument4 paginiLab Report: Exploration of The Working Principle of Pantograph Mechanismhuzaifa sarwarÎncă nu există evaluări
- Tom 09.01.2015Document66 paginiTom 09.01.2015deepakmahalecoepÎncă nu există evaluări
- 232 Reuleaux Collection of Kinematic Mechanisms at Cornell UniversityDocument18 pagini232 Reuleaux Collection of Kinematic Mechanisms at Cornell UniversityEuber RondonÎncă nu există evaluări
- Introduction To Mechatronics and Mechatronics in Real LifeDocument13 paginiIntroduction To Mechatronics and Mechatronics in Real LifeNaza HadiramadanÎncă nu există evaluări
- All Systems Go Recovering Jack Burnham's Systems Aesthetics'Document11 paginiAll Systems Go Recovering Jack Burnham's Systems Aesthetics'Iván D. Marifil MartinezÎncă nu există evaluări
- Machine and Ecology: AngelakiDocument14 paginiMachine and Ecology: Angelakifilter547Încă nu există evaluări
- Art in The Information Age - Technology and Conceptual ArtDocument6 paginiArt in The Information Age - Technology and Conceptual ArtdoragreenissleepyÎncă nu există evaluări
- Meca2170 JFR Cours1 PDFDocument31 paginiMeca2170 JFR Cours1 PDFastudespusÎncă nu există evaluări
- TACN Lesson 7 Reading 1 RoboticsDocument3 paginiTACN Lesson 7 Reading 1 Roboticssanbay phanthietÎncă nu există evaluări
- Introduction to Structural AnalysisDocument2 paginiIntroduction to Structural AnalysisMelvin EsguerraÎncă nu există evaluări
- Shop Practice 3Document14 paginiShop Practice 3Aaron PranadaÎncă nu există evaluări
- WM0312CIE Philosophy, Technology Assessment and Ethics For Civil EngineeringDocument48 paginiWM0312CIE Philosophy, Technology Assessment and Ethics For Civil EngineeringAmeyÎncă nu există evaluări
- Mechanics of Machines ME 312Document30 paginiMechanics of Machines ME 312Hassan AliÎncă nu există evaluări
- Applied Mechanics - WikipediaDocument29 paginiApplied Mechanics - WikipediaUchechukwu MarizuÎncă nu există evaluări
- DampingDocument4 paginiDampingMARIA RHODORA BITBITÎncă nu există evaluări
- Drexler MIT DissertationDocument487 paginiDrexler MIT DissertationMelanie Allen100% (1)
- Module III: Six Important Characteristics of Contemporary Science and TechnologyDocument13 paginiModule III: Six Important Characteristics of Contemporary Science and TechnologyCarmsÎncă nu există evaluări
- The Reuleaux Collection of Kinematic Mechanisms at Cornell UniversityDocument18 paginiThe Reuleaux Collection of Kinematic Mechanisms at Cornell Universityfieramina100% (2)
- Random Processes in Nonlinear Control Systems by A A PervozvanskiiDe la EverandRandom Processes in Nonlinear Control Systems by A A PervozvanskiiÎncă nu există evaluări
- SPR-V1 2100.00-A Plate Frame Upper Sub AssemblyDocument1 paginăSPR-V1 2100.00-A Plate Frame Upper Sub AssemblyAlanÎncă nu există evaluări
- Weight Material: Units Unless Specified Scale Sheet Size SheetDocument1 paginăWeight Material: Units Unless Specified Scale Sheet Size SheetAlanÎncă nu există evaluări
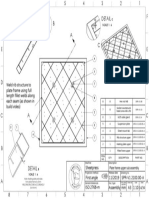
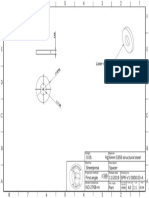
- Laser-cut Hood Bracket Assembly InstructionsDocument1 paginăLaser-cut Hood Bracket Assembly InstructionsAlanÎncă nu există evaluări
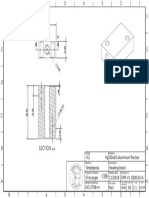
- SPR-V1 2000.02-A Heating BlockDocument1 paginăSPR-V1 2000.02-A Heating BlockAlanÎncă nu există evaluări
- SPR-V1 0000.00-A Sheetpress AssemblyDocument1 paginăSPR-V1 0000.00-A Sheetpress AssemblyAlanÎncă nu există evaluări
- SPR-V1 1000.01-A Side FrameDocument1 paginăSPR-V1 1000.01-A Side FrameAlanÎncă nu există evaluări
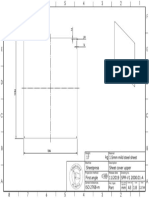
- SPR-V1 2000.01-A Sheet Cover UpperDocument1 paginăSPR-V1 2000.01-A Sheet Cover UpperAlanÎncă nu există evaluări
- Heating block assemblyDocument1 paginăHeating block assemblyAlanÎncă nu există evaluări
- Laser-cut Hood Bracket Assembly InstructionsDocument1 paginăLaser-cut Hood Bracket Assembly InstructionsAlanÎncă nu există evaluări
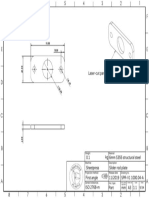
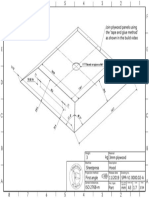
- Laser-cut sliding bracket drawingDocument1 paginăLaser-cut sliding bracket drawingAlanÎncă nu există evaluări
- SPR-V1 1000.00-A Side Frame AssemblyDocument1 paginăSPR-V1 1000.00-A Side Frame AssemblyAlanÎncă nu există evaluări
- 02 - Shredding Laser Overview Part AnsweldingDocument1 pagină02 - Shredding Laser Overview Part AnsweldingCoordinador DicÎncă nu există evaluări
- SPR-V1 1000.04-A Slider Rod PlateDocument1 paginăSPR-V1 1000.04-A Slider Rod PlateAlanÎncă nu există evaluări
- SPR-V1 0000.03-A SpacerDocument1 paginăSPR-V1 0000.03-A SpacerAlanÎncă nu există evaluări
- SPR-V1 0000.01-A Bottom FrameDocument1 paginăSPR-V1 0000.01-A Bottom FrameAlanÎncă nu există evaluări
- SPR-V1 0000.02-A HoodDocument1 paginăSPR-V1 0000.02-A HoodAlanÎncă nu există evaluări
- Oxygen Control: Version No: 2.4Document16 paginiOxygen Control: Version No: 2.4AlanÎncă nu există evaluări
- 00 - Shredder Overview PDFDocument1 pagină00 - Shredder Overview PDFs.senthil nathanÎncă nu există evaluări
- Visual Properties A1Document1 paginăVisual Properties A1AlanÎncă nu există evaluări
- Automation Control Theory and PracticeDocument360 paginiAutomation Control Theory and PracticespretkovÎncă nu există evaluări
- 01 Shredding OverviewDocument1 pagină01 Shredding OverviewAna LopezÎncă nu există evaluări
- Fuel Oil System: Other Pages The Basics The 2 Stroke Engine The 4 Stroke Engine Operation MembersDocument8 paginiFuel Oil System: Other Pages The Basics The 2 Stroke Engine The 4 Stroke Engine Operation MembersAlanÎncă nu există evaluări
- Linde PLC LE Brochure Customized Air Separation Plants 2020 EN 41271 RZ VIEW2 tcm19-392416Document16 paginiLinde PLC LE Brochure Customized Air Separation Plants 2020 EN 41271 RZ VIEW2 tcm19-392416DZADZA YAOVIÎncă nu există evaluări
- Dozer Simulator Training Pack: OverviewDocument2 paginiDozer Simulator Training Pack: OverviewAnyam TilneyÎncă nu există evaluări
- Catalogue AMF Standard Clamping ElementsDocument168 paginiCatalogue AMF Standard Clamping ElementsLang AwÎncă nu există evaluări
- Leading The Industry In: Solar Microinverter TechnologyDocument2 paginiLeading The Industry In: Solar Microinverter TechnologydukegaloÎncă nu există evaluări
- BE46-122-03 J52 SwitchesDocument2 paginiBE46-122-03 J52 SwitchesMichaelÎncă nu există evaluări
- Optimum 4-Cylinder Engine Design via 1D CFD SimulationDocument7 paginiOptimum 4-Cylinder Engine Design via 1D CFD SimulationZohaib AliÎncă nu există evaluări
- Smart CFL Ni DownlightDocument8 paginiSmart CFL Ni DownlightBass KomkotakÎncă nu există evaluări
- BPSK, QamDocument6 paginiBPSK, QamYassine El HadakÎncă nu există evaluări
- Elapan Company Profile 2023Document7 paginiElapan Company Profile 2023Mas SamÎncă nu există evaluări
- Automatic Transmission / Trans: PreparationDocument2 paginiAutomatic Transmission / Trans: PreparationRodrigo RubioÎncă nu există evaluări
- Myths and Legends in High-Performance ComputingDocument12 paginiMyths and Legends in High-Performance ComputingisnullÎncă nu există evaluări
- Business Plug-In B6 Information Security: Learning OutcomesDocument7 paginiBusiness Plug-In B6 Information Security: Learning OutcomesThao TrungÎncă nu există evaluări
- Cpsu Hinigaran Campus: Central Philippines State UniversityDocument3 paginiCpsu Hinigaran Campus: Central Philippines State UniversityChristian anthony SerfinoÎncă nu există evaluări
- Script FontDocument76 paginiScript FontJulio Gomez SilvermanÎncă nu există evaluări
- DSASW00375052Document22 paginiDSASW00375052RodríguezÎncă nu există evaluări
- Deakin Learning Futures AGENDA 2020 Stage 2: Assessment and Learning DesignDocument6 paginiDeakin Learning Futures AGENDA 2020 Stage 2: Assessment and Learning DesignAmel Abbas Abbas AbbakerÎncă nu există evaluări
- Power Electronics Devices LectureDocument19 paginiPower Electronics Devices Lecturehabte gebreial shrashrÎncă nu există evaluări
- JWT Service ImplDocument2 paginiJWT Service ImplscribdÎncă nu există evaluări
- How Does Work Order Capitalization and Billing Functionalities WorkDocument2 paginiHow Does Work Order Capitalization and Billing Functionalities Workreco83Încă nu există evaluări
- Simulation and Implementation of A BPSK Modulator On FPGADocument14 paginiSimulation and Implementation of A BPSK Modulator On FPGAAnonymous 01LLHnZTSÎncă nu există evaluări
- Technical Specifications for Security SystemsDocument21 paginiTechnical Specifications for Security Systemsbenyaki100% (1)
- SDD TemplateDocument7 paginiSDD Templatede_jvÎncă nu există evaluări
- Blue Prism Process TemplatesDocument29 paginiBlue Prism Process TemplatesSanket KanganeÎncă nu există evaluări
- Configuring Huawei Router Interfaces and Static RoutesDocument9 paginiConfiguring Huawei Router Interfaces and Static RoutesSidy Elbechir DrameÎncă nu există evaluări
- Power Cycle Apg40cDocument4 paginiPower Cycle Apg40cPhuong Nguyen ThanhÎncă nu există evaluări
- Grade 2 Computer Exams Mid Term TwoDocument4 paginiGrade 2 Computer Exams Mid Term TwoRichard MathiwaÎncă nu există evaluări
- CPH Micro Project PDFDocument10 paginiCPH Micro Project PDFAbhay PotdarÎncă nu există evaluări
- Souvik Ghosh - ResumeDocument2 paginiSouvik Ghosh - ResumeAnonymous 5XUZZE7Încă nu există evaluări