S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Lec 1Document20 paginiLec 1Naeemo IraqiÎncă nu există evaluări
- Fuzzy Sets and Fuzzification: Prof. Dr. Allaeldin H. KassamDocument95 paginiFuzzy Sets and Fuzzification: Prof. Dr. Allaeldin H. KassamNaeemo IraqiÎncă nu există evaluări
- Performance Analysis of Siso /miso For Inter-Uavs Swarm With Pointing Error EffectDocument4 paginiPerformance Analysis of Siso /miso For Inter-Uavs Swarm With Pointing Error EffectNaeemo IraqiÎncă nu există evaluări
- Fuzzy Sets and Fuzzification: Prof. Dr. Allaeldin H. KassamDocument95 paginiFuzzy Sets and Fuzzification: Prof. Dr. Allaeldin H. KassamNaeemo IraqiÎncă nu există evaluări
- PC Example SolutionDocument5 paginiPC Example SolutionJony AbrahamÎncă nu există evaluări
- 8 - DH Method of Forward Kinematic - 1Document5 pagini8 - DH Method of Forward Kinematic - 1Naeemo IraqiÎncă nu există evaluări
- Chapter Three Mathematical Modeling of ProcessDocument10 paginiChapter Three Mathematical Modeling of ProcessNaeemo IraqiÎncă nu există evaluări
- LT3Document2 paginiLT3Naeemo IraqiÎncă nu există evaluări
- Raleigh Distributions PDFDocument10 paginiRaleigh Distributions PDFNaeemo IraqiÎncă nu există evaluări
- C8 CusslerDocument33 paginiC8 Cusslerraj_zzz80Încă nu există evaluări
- LT2Document2 paginiLT2Naeemo IraqiÎncă nu există evaluări
- UcucucDocument97 paginiUcucucJV Custodio100% (2)
- Denavit Hartenberg Parameters: June 17, 2009Document4 paginiDenavit Hartenberg Parameters: June 17, 2009Naeemo IraqiÎncă nu există evaluări
- 2014 Monthly CalendarDocument12 pagini2014 Monthly CalendarBansboyÎncă nu există evaluări
- EE 451 - Kinematics & Inverse Kinematics: H.I. BozmaDocument47 paginiEE 451 - Kinematics & Inverse Kinematics: H.I. BozmaNaeemo IraqiÎncă nu există evaluări
- Robotics Lec3 IKDocument28 paginiRobotics Lec3 IKNaeemo IraqiÎncă nu există evaluări
- Naeem AL Iraqi Problems Solution RoboticsDocument57 paginiNaeem AL Iraqi Problems Solution RoboticsNaeemo IraqiÎncă nu există evaluări
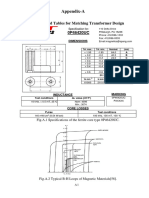
- Appendix ADocument3 paginiAppendix ANaeemo IraqiÎncă nu există evaluări
- DhparamsDocument7 paginiDhparamsTolution OdujinrinÎncă nu există evaluări
- Robotics Lec2Document23 paginiRobotics Lec2Naeemo IraqiÎncă nu există evaluări
- Two Dimensional TrussDocument2 paginiTwo Dimensional Trussgreat2007Încă nu există evaluări
- 2014 Monthly CalendarDocument12 pagini2014 Monthly CalendarBansboyÎncă nu există evaluări
- Appendix ADocument3 paginiAppendix ANaeemo IraqiÎncă nu există evaluări
- RefrencesDocument1 paginăRefrencesNaeemo IraqiÎncă nu există evaluări
- Q1:Find Figure - Show Poistion AB: DateDocument12 paginiQ1:Find Figure - Show Poistion AB: DateNaeemo IraqiÎncă nu există evaluări
- IRANIAN JOURNAL OF ELECTRICAL AND ELECTRONIC ENGIN - Volume 15 - Issue 1 - Pages 94-113 PDFDocument20 paginiIRANIAN JOURNAL OF ELECTRICAL AND ELECTRONIC ENGIN - Volume 15 - Issue 1 - Pages 94-113 PDFNaeemo IraqiÎncă nu există evaluări
- CH 1Document19 paginiCH 1Naeemo IraqiÎncă nu există evaluări
- Q1:Find Figure - Show Poistion AB: DateDocument12 paginiQ1:Find Figure - Show Poistion AB: DateNaeemo IraqiÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- PP Checklist (From IB)Document2 paginiPP Checklist (From IB)Pete GoodmanÎncă nu există evaluări
- Schermer 1984Document25 paginiSchermer 1984Pedro VeraÎncă nu există evaluări
- (Kazantzakis Nikos) Freedom or DeathDocument195 pagini(Kazantzakis Nikos) Freedom or DeathTarlan FisherÎncă nu există evaluări
- Ep Docx Sca SMSC - V2Document45 paginiEp Docx Sca SMSC - V290007Încă nu există evaluări
- WellaPlex Technical 2017Document2 paginiWellaPlex Technical 2017Rinita BhattacharyaÎncă nu există evaluări
- U2 KeyDocument2 paginiU2 KeyHằng ĐặngÎncă nu există evaluări
- How Muslim Inventors Changed The WorldDocument4 paginiHow Muslim Inventors Changed The WorldShadab AnjumÎncă nu există evaluări
- PEA Comp Study - Estate Planning For Private Equity Fund Managers (ITaback, JWaxenberg 10 - 10)Document13 paginiPEA Comp Study - Estate Planning For Private Equity Fund Managers (ITaback, JWaxenberg 10 - 10)lbaker2009Încă nu există evaluări
- Listening Tests 81112Document13 paginiListening Tests 81112luprof tpÎncă nu există evaluări
- Resa Auditing Theorydocx - CompressDocument64 paginiResa Auditing Theorydocx - CompressMaeÎncă nu există evaluări
- AWS Compete CustomerDocument33 paginiAWS Compete CustomerSergeyÎncă nu există evaluări
- ProjectDocument22 paginiProjectSayan MondalÎncă nu există evaluări
- Carbonate Platform MateriDocument8 paginiCarbonate Platform MateriNisaÎncă nu există evaluări
- New Text DocumentDocument13 paginiNew Text DocumentJitendra Karn RajputÎncă nu există evaluări
- Measuring and Modeling Vertical Crosshead Vibration in Api-618 Reciprocating CompressorsDocument18 paginiMeasuring and Modeling Vertical Crosshead Vibration in Api-618 Reciprocating CompressorshmshawkiÎncă nu există evaluări
- Serenity RPG Firefly Role Playing Game PDFDocument225 paginiSerenity RPG Firefly Role Playing Game PDFNathaniel Broyles67% (3)
- Previous Papers GPSC Veterinary Officer AHI Advt. No. 33 2016 17 Date of Preliminary Test 08 01 2017 Subject Concerned Subject Que 101 To 300 Provisional Key PDFDocument18 paginiPrevious Papers GPSC Veterinary Officer AHI Advt. No. 33 2016 17 Date of Preliminary Test 08 01 2017 Subject Concerned Subject Que 101 To 300 Provisional Key PDFDrRameem Bloch100% (1)
- Necromunda CatalogDocument35 paginiNecromunda Catalogzafnequin8494100% (1)
- Types of Intermolecular ForcesDocument34 paginiTypes of Intermolecular ForcesRuschan JaraÎncă nu există evaluări
- Assignment 4 Job Order Costing - ACTG321 - Cost Accounting and Cost ManagementDocument3 paginiAssignment 4 Job Order Costing - ACTG321 - Cost Accounting and Cost ManagementGenithon PanisalesÎncă nu există evaluări
- Service Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesDocument3 paginiService Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesSamarÎncă nu există evaluări
- Crusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabDocument3 paginiCrusader Castle Al-Karak Jordan Levant Pagan Fulk, King of Jerusalem MoabErika CalistroÎncă nu există evaluări
- Case Study Managerial EconomicsDocument4 paginiCase Study Managerial EconomicsZaza Afiza100% (1)
- Teambinder Product BrochureDocument7 paginiTeambinder Product BrochurePrinceÎncă nu există evaluări
- 3 AcmeCorporation Fullstrategicplan 06052015 PDFDocument11 pagini3 AcmeCorporation Fullstrategicplan 06052015 PDFDina DawoodÎncă nu există evaluări
- ADMT Guide: Migrating and Restructuring Active Directory DomainsDocument263 paginiADMT Guide: Migrating and Restructuring Active Directory DomainshtoomaweÎncă nu există evaluări
- ACTIX Basic (Sample CDMA)Document73 paginiACTIX Basic (Sample CDMA)radhiwibowoÎncă nu există evaluări
- 04 Task Performance 1Document2 pagini04 Task Performance 1mart arvyÎncă nu există evaluări
- Text Extraction From Image: Team Members CH - Suneetha (19mcmb22) Mohit Sharma (19mcmb13)Document20 paginiText Extraction From Image: Team Members CH - Suneetha (19mcmb22) Mohit Sharma (19mcmb13)suneethaÎncă nu există evaluări
- Coefficient of Restitution - Center of MassDocument3 paginiCoefficient of Restitution - Center of MassMannyCesÎncă nu există evaluări