S-ar putea să vă placă și
- Y Yyy Y YyyDocument53 paginiY Yyy Y YyyDhrishya SyamÎncă nu există evaluări
- Transportation ProblemDocument16 paginiTransportation Problemmmaannttrraa100% (4)
- Transportation ProblemDocument27 paginiTransportation ProblemAthiraÎncă nu există evaluări
- The Transportation ProblemDocument60 paginiThe Transportation ProblemGeeta JoshiÎncă nu există evaluări
- Transportation ProblemDocument20 paginiTransportation ProblemChasity WrightÎncă nu există evaluări
- Transportation ProblemDocument155 paginiTransportation Problemmicky_chhabra55100% (2)
- A Project On Transportation ProblemDocument35 paginiA Project On Transportation ProblemRamapriya MÎncă nu există evaluări
- Practice Problems For Mid Term TestDocument11 paginiPractice Problems For Mid Term TestAkshada VinchurkarÎncă nu există evaluări
- Transportation ProblemDocument63 paginiTransportation ProblemlulughoshÎncă nu există evaluări
- CHAPTER 6 - TransportationDocument35 paginiCHAPTER 6 - Transportationshirley lynÎncă nu există evaluări
- Chapter 03 TP EndDocument43 paginiChapter 03 TP EndMesfin MekuriaÎncă nu există evaluări
- Transportation ProblemDocument17 paginiTransportation ProblemHarjeet Kaur100% (2)
- Transportation Problem A Special Case For Linear Programming Problems PDFDocument36 paginiTransportation Problem A Special Case For Linear Programming Problems PDFCaz Tee-NahÎncă nu există evaluări
- MODI Method Examples Transportation Problem PDFDocument4 paginiMODI Method Examples Transportation Problem PDFsukhdev thakurÎncă nu există evaluări
- Lecture 9. Transportation and Assignment ModelsDocument84 paginiLecture 9. Transportation and Assignment ModelsJamora ManilynÎncă nu există evaluări
- Chapter V Transportation and Assignment ProblemsDocument56 paginiChapter V Transportation and Assignment ProblemsErit AhmedÎncă nu există evaluări
- Kalai or ProjectDocument30 paginiKalai or ProjectKalai SÎncă nu există evaluări
- Transportation and Assignment ProblemDocument67 paginiTransportation and Assignment ProblemRovick TarifeÎncă nu există evaluări
- Quantitative Techniques: Transportation AnalysisDocument15 paginiQuantitative Techniques: Transportation AnalysisalexÎncă nu există evaluări
- Transportation, Assignment & Transshipment ProblemDocument7 paginiTransportation, Assignment & Transshipment ProblemNeha TayalÎncă nu există evaluări
- Transportation Problem in Operation ResearchDocument60 paginiTransportation Problem in Operation ResearchRatnesh SinghÎncă nu există evaluări
- R5311304-Operations ResearchDocument4 paginiR5311304-Operations ResearchsivabharathamurthyÎncă nu există evaluări
- Queuing AnalysisDocument17 paginiQueuing AnalysisJerson OpisÎncă nu există evaluări
- CHAPTER 3 Transportatiofor Night ClassDocument10 paginiCHAPTER 3 Transportatiofor Night ClassHACHALU FAYE100% (1)
- Lesson Test For Optimal Solution To A Transportation ProblemDocument10 paginiLesson Test For Optimal Solution To A Transportation ProblemBindia ChandelÎncă nu există evaluări
- Dual Simplex MethodDocument27 paginiDual Simplex MethodKirtibant Naha100% (2)
- Chapter 3 Transportation and Assignment ProblemDocument33 paginiChapter 3 Transportation and Assignment ProblemfekadeÎncă nu există evaluări
- DS-Session-Transportation Models and TransshipmnetDocument101 paginiDS-Session-Transportation Models and TransshipmnetMeghna Adhikary100% (1)
- Linear Programming Transportation ProblemDocument73 paginiLinear Programming Transportation ProblemHakim Kakembo100% (5)
- Chap4 Exercise On Sensitivity Analysis SolutionDocument2 paginiChap4 Exercise On Sensitivity Analysis SolutionIves LeeÎncă nu există evaluări
- Exercise On Transportation, Transshipment and Assignment ProblemsDocument3 paginiExercise On Transportation, Transshipment and Assignment ProblemsKate Iannel VicenteÎncă nu există evaluări
- Mathematical Models For Facility LocationDocument28 paginiMathematical Models For Facility LocationaddayesudasÎncă nu există evaluări
- SCM 16 Transportation Management - Part-2Document11 paginiSCM 16 Transportation Management - Part-2swagat mohapatra100% (1)
- Transporatation Problems ExercisesDocument38 paginiTransporatation Problems ExercisesAshish Dhote100% (1)
- LocationDocument30 paginiLocationAlok RajÎncă nu există evaluări
- A Project On The Economic Order QuantityDocument26 paginiA Project On The Economic Order QuantityFortune Fmx MushongaÎncă nu există evaluări
- Solving A Transportation Problem Actual Problem Using Excel SolverDocument5 paginiSolving A Transportation Problem Actual Problem Using Excel SolverKim HyunaÎncă nu există evaluări
- Cost Ii CH 2Document23 paginiCost Ii CH 2TESFAY GEBRECHERKOSÎncă nu există evaluări
- HW1Document12 paginiHW1roberto tumbacoÎncă nu există evaluări
- Linear Programming Formulation ExamplesDocument22 paginiLinear Programming Formulation ExamplesDymphna Ann CalumpianoÎncă nu există evaluări
- Handout 03 Continuous Random VariablesDocument18 paginiHandout 03 Continuous Random Variablesmuhammad ali100% (1)
- Mathematical ModelingDocument3 paginiMathematical Modelingcumimayang0% (1)
- Location StrategyDocument15 paginiLocation Strategyhesham hassanÎncă nu există evaluări
- Linear ProgrammingDocument15 paginiLinear Programmingjogindra singh100% (1)
- Transportation Problems 5Document50 paginiTransportation Problems 5Anisha Gulia100% (1)
- X X X X: Answer: 300Document4 paginiX X X X: Answer: 300zohaibÎncă nu există evaluări
- Application of Linear Programming Techniques To PracticalDocument13 paginiApplication of Linear Programming Techniques To PracticalAlexander Decker100% (1)
- Transportation Method of Linear Programming: Obtaining The Initial Feasible SolutionDocument31 paginiTransportation Method of Linear Programming: Obtaining The Initial Feasible SolutionGela Soriano100% (1)
- Queuing Theory QuestionsDocument2 paginiQueuing Theory QuestionsDeepanshu DimriÎncă nu există evaluări
- OR2 - Transportation Cost Optimization - Nawaf Alshaikh1Document7 paginiOR2 - Transportation Cost Optimization - Nawaf Alshaikh1Nawaf ALshaikhÎncă nu există evaluări
- Operation Research Assignment - Transportation ProblemsDocument5 paginiOperation Research Assignment - Transportation ProblemsjeganrajrajÎncă nu există evaluări
- The Assignment ProblemDocument13 paginiThe Assignment ProblemAnonymous lrILoRYJWÎncă nu există evaluări
- Primal Dual LPPDocument26 paginiPrimal Dual LPPTech_MXÎncă nu există evaluări
- Transportation ProblemDocument18 paginiTransportation ProblemNaveen Kumar PagadalaÎncă nu există evaluări
- Four Sector ModelDocument2 paginiFour Sector ModelVishal Patel100% (1)
- Transportation and Assignment ProblemsDocument45 paginiTransportation and Assignment ProblemsAnomoi Septentrio50% (2)
- TransDocument10 paginiTransutpalitÎncă nu există evaluări
- TRANsSHIPMENT PROBLEMDocument12 paginiTRANsSHIPMENT PROBLEMsalim1321100% (5)
- Transportation ModelsDocument2 paginiTransportation ModelsLIM, KIARRA ANNIKA R.Încă nu există evaluări
- Summary of Findings and Recommendations:: Appointment of A Safety ConsultantDocument2 paginiSummary of Findings and Recommendations:: Appointment of A Safety ConsultantBilal Ahmed BarbhuiyaÎncă nu există evaluări
- Yamuna ExpresswayDocument7 paginiYamuna Expresswaybhagirathl50% (2)
- SCHOTTEL Hybrid Propulsion - Lester BokDocument21 paginiSCHOTTEL Hybrid Propulsion - Lester BokKenneth TanÎncă nu există evaluări
- Sport - Ty3 Brake Disc 59.e115.44Document2 paginiSport - Ty3 Brake Disc 59.e115.44Bruno BrunacciÎncă nu există evaluări
- Rail Track Resistance Verification Considering Track-Bridge-InteractionDocument122 paginiRail Track Resistance Verification Considering Track-Bridge-InteractionAltomar100% (1)
- Overview of Aai Managed AirportsDocument4 paginiOverview of Aai Managed AirportsArun JayankondanÎncă nu există evaluări
- 10 Chapter 3Document51 pagini10 Chapter 3moinsulemanmullaÎncă nu există evaluări
- 11th Street Bridge Winter Newsletter 2011-12-02Document4 pagini11th Street Bridge Winter Newsletter 2011-12-02AnacostiaWaterfrontÎncă nu există evaluări
- Captura 2020-07-20 A Las 22.58.15Document1 paginăCaptura 2020-07-20 A Las 22.58.15joseÎncă nu există evaluări
- Part Catalog Canter PDFDocument749 paginiPart Catalog Canter PDFYulius Purnama100% (1)
- Book 7 - Flight Performance and Planning 2 Segregated INDEXDocument15 paginiBook 7 - Flight Performance and Planning 2 Segregated INDEXBilalÎncă nu există evaluări
- ComputadoraDocument14 paginiComputadoraLaan AmbrizÎncă nu există evaluări
- Specifications: General InformationDocument15 paginiSpecifications: General InformationyemenÎncă nu există evaluări
- Terra SV Digital BrochureDocument21 paginiTerra SV Digital BrochureJoselito Azarraga VÎncă nu există evaluări
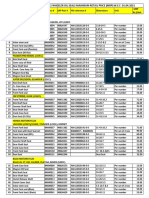
- Nok Two Wheeler MRP List Wef 1.4.2021Document4 paginiNok Two Wheeler MRP List Wef 1.4.2021Senthil KumarÎncă nu există evaluări
- Casr 103Document7 paginiCasr 103FirmansyahFandi100% (1)
- ĐỀ CHUYÊN NGỮ 01Document8 paginiĐỀ CHUYÊN NGỮ 01Hieu NguyenÎncă nu există evaluări
- Etops Briefing History 1999Document19 paginiEtops Briefing History 1999Wee Yang LimÎncă nu există evaluări
- Fisa Tehnica Scania - EnglishDocument5 paginiFisa Tehnica Scania - Englishshtou2Încă nu există evaluări
- Group 2 Intersection - Elements, Types, Design Parameters, and Levels of ControlDocument63 paginiGroup 2 Intersection - Elements, Types, Design Parameters, and Levels of ControlCharles Mari S. Ramos100% (1)
- Matheri G 2013-06 Uon WebsiteDocument5 paginiMatheri G 2013-06 Uon WebsitePal D' ColloÎncă nu există evaluări
- Thesis On Road SafetyDocument102 paginiThesis On Road SafetySumon Chowdhury88% (16)
- 2018 Yilan Train Derailment - WikipediaDocument4 pagini2018 Yilan Train Derailment - WikipediaDenis PegoraroÎncă nu există evaluări
- Parking LayoutsDocument1 paginăParking LayoutsArushi singhÎncă nu există evaluări
- Report On Century Ply CFS, KolkatDocument6 paginiReport On Century Ply CFS, Kolkatrishikapoor007100% (1)
- DL 600Document108 paginiDL 600timothycbautistaÎncă nu există evaluări
- Understanding Traffic Congestion From Stakeholders' Perceptions in The Central Area of Lahore, PakistanDocument13 paginiUnderstanding Traffic Congestion From Stakeholders' Perceptions in The Central Area of Lahore, PakistanRahim RajarÎncă nu există evaluări
- cp1 Aviation ReportDocument150 paginicp1 Aviation ReportvedantÎncă nu există evaluări
- I RRZ+ F) Invn Ix, - (S:: Ievn N . I Rns I Rez+Document3 paginiI RRZ+ F) Invn Ix, - (S:: Ievn N . I Rns I Rez+Lycv Montederamos Asis100% (1)
- Traffic and Revenue Forecasting For The Dhaka-Chittagong Expressway: Distributed Values of Time and Vehicle-Specific Volume-Delay FunctionsDocument19 paginiTraffic and Revenue Forecasting For The Dhaka-Chittagong Expressway: Distributed Values of Time and Vehicle-Specific Volume-Delay FunctionsRichard Di BonaÎncă nu există evaluări