S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Essential Calculus Skills Practice Workbook With Full SolutionsDocument528 paginiEssential Calculus Skills Practice Workbook With Full SolutionsGerardo Navarro Sánchez94% (65)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Filipino Construction TermsDocument6 paginiFilipino Construction TermsAdrian Perez75% (4)
- Iodide and Bromide Ions in Brackish Water, Seawater, and Brines D 3869 - 04Document12 paginiIodide and Bromide Ions in Brackish Water, Seawater, and Brines D 3869 - 04stevgonÎncă nu există evaluări
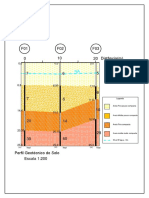
- Perfil2 PDFDocument1 paginăPerfil2 PDFrubensc778Încă nu există evaluări
- Sunthonkanokpong (2011) PDFDocument5 paginiSunthonkanokpong (2011) PDFrubensc778Încă nu există evaluări
- Evolutionary Computation Volume 10 Issue 1 2002 (Doi 10.1162 - 106365602317301754) Smith, Tom Husbands, Phil O'Shea, Michael - Fitness Landscapes and Evolvability PDFDocument34 paginiEvolutionary Computation Volume 10 Issue 1 2002 (Doi 10.1162 - 106365602317301754) Smith, Tom Husbands, Phil O'Shea, Michael - Fitness Landscapes and Evolvability PDFrubensc778Încă nu există evaluări
- Funções Singulares 2 PDFDocument7 paginiFunções Singulares 2 PDFrubensc778Încă nu există evaluări
- SelectionDocument4 paginiSelectionrubensc778Încă nu există evaluări
- Maintenance Páginas-509-580Document72 paginiMaintenance Páginas-509-580Alexandra Gabriela Pacheco PrietoÎncă nu există evaluări
- Carrefour-SA Shopping Center TurkeyDocument2 paginiCarrefour-SA Shopping Center TurkeyVineet JogalekarÎncă nu există evaluări
- AS and A Level: ChemistryDocument11 paginiAS and A Level: ChemistryStingy BieÎncă nu există evaluări
- Volvo Penta GensetDocument4 paginiVolvo Penta GensetafandybaharuddinÎncă nu există evaluări
- Coding Decoding Sheet - 01 1678021709186Document9 paginiCoding Decoding Sheet - 01 1678021709186Sumit VermaÎncă nu există evaluări
- BITS Pilani: Determination of Extreme Pressure, Wear Preventive Characteristics of Lubricants Using Four Ball TesterDocument10 paginiBITS Pilani: Determination of Extreme Pressure, Wear Preventive Characteristics of Lubricants Using Four Ball Testerakash chÎncă nu există evaluări
- English2 Q2 Summative Assessment 4 2Document4 paginiEnglish2 Q2 Summative Assessment 4 2ALNIE PANGANIBANÎncă nu există evaluări
- The History of AstrologyDocument36 paginiThe History of AstrologyDharani Dharendra DasÎncă nu există evaluări
- Manuscript FsDocument76 paginiManuscript FsRalph HumpaÎncă nu există evaluări
- Frye LGD As A Function of The Default Rate 091013 PDFDocument13 paginiFrye LGD As A Function of The Default Rate 091013 PDFSushant SinghÎncă nu există evaluări
- Eco JetDocument15 paginiEco JetJustin CoyÎncă nu există evaluări
- SR No Service CodeDocument30 paginiSR No Service CodeShiva KrishnaÎncă nu există evaluări
- EDS-A-0101: Automotive Restricted Hazardous Substances For PartsDocument14 paginiEDS-A-0101: Automotive Restricted Hazardous Substances For PartsMuthu GaneshÎncă nu există evaluări
- PANASONIC - WebCam-TQZJ402 - TY-CC20W PDFDocument188 paginiPANASONIC - WebCam-TQZJ402 - TY-CC20W PDF123anthonyÎncă nu există evaluări
- Free Electron TheoryDocument8 paginiFree Electron TheoryNeelam KapoorÎncă nu există evaluări
- Las Tech Drafting 3Q WKDocument13 paginiLas Tech Drafting 3Q WKClemenda TuscanoÎncă nu există evaluări
- Project ReportDocument14 paginiProject ReportNoah100% (7)
- MA 106: Linear Algebra Tutorial 1: Prof. B.V. Limaye IIT DharwadDocument4 paginiMA 106: Linear Algebra Tutorial 1: Prof. B.V. Limaye IIT Dharwadamar BaroniaÎncă nu există evaluări
- Management of DredgedExcavated SedimentDocument17 paginiManagement of DredgedExcavated SedimentMan Ho LamÎncă nu există evaluări
- VavDocument8 paginiVavkprasad_56900Încă nu există evaluări
- SMC VM Eu PDFDocument66 paginiSMC VM Eu PDFjoguvÎncă nu există evaluări
- A Study On Traditional Medicinal Herbs Used by The Ethnic People of Goalpara District of Assam, North East IndiaDocument6 paginiA Study On Traditional Medicinal Herbs Used by The Ethnic People of Goalpara District of Assam, North East IndiaDr. Krishna N. SharmaÎncă nu există evaluări
- Discrete Wavelet TransformDocument10 paginiDiscrete Wavelet TransformVigneshInfotechÎncă nu există evaluări
- Physics Unit 11 NotesDocument26 paginiPhysics Unit 11 Notesp.salise352Încă nu există evaluări
- Worksheet - 143760187HS-II, TUTORIAL ON CH-5Document14 paginiWorksheet - 143760187HS-II, TUTORIAL ON CH-5A MusaverÎncă nu există evaluări
- Line Differential Protection Red670Document8 paginiLine Differential Protection Red670igorsfaceÎncă nu există evaluări
- c270 KW NTA855G2 60 HZDocument31 paginic270 KW NTA855G2 60 HZAhmad El KhatibÎncă nu există evaluări