S-ar putea să vă placă și
- Briz - ULO3a Let's Analyze (ELEC3)Document2 paginiBriz - ULO3a Let's Analyze (ELEC3)Briely BrizÎncă nu există evaluări
- Format For Final DefenseDocument12 paginiFormat For Final DefenseBriely BrizÎncă nu există evaluări
- Radiowave Propagation MCQDocument10 paginiRadiowave Propagation MCQBriely BrizÎncă nu există evaluări
- ECE542L - Laboratory Experiment 1 PDFDocument13 paginiECE542L - Laboratory Experiment 1 PDFBriely BrizÎncă nu există evaluări
- ECE542L - Laboratory Experiment 1 PDFDocument13 paginiECE542L - Laboratory Experiment 1 PDFBriely BrizÎncă nu există evaluări
- Lecture 5 8051 ArchitectureDocument22 paginiLecture 5 8051 ArchitectureBriely BrizÎncă nu există evaluări
- Lecture 5 8051 ArchitectureDocument22 paginiLecture 5 8051 ArchitectureBriely BrizÎncă nu există evaluări
- Water Dispenser BasicsDocument3 paginiWater Dispenser BasicsBriely BrizÎncă nu există evaluări
- FILEDocument4 paginiFILEBriely BrizÎncă nu există evaluări
- Mathcc 18 PDFDocument6 paginiMathcc 18 PDFBriely BrizÎncă nu există evaluări
- The Title ProposalDocument6 paginiThe Title ProposalBriely BrizÎncă nu există evaluări
- The Title ProposalDocument6 paginiThe Title ProposalBriely BrizÎncă nu există evaluări
- Development of Smart Solar-Powered Waste Bin Segregation Using Image ProcessingDocument7 paginiDevelopment of Smart Solar-Powered Waste Bin Segregation Using Image ProcessingBriely BrizÎncă nu există evaluări
- Trans PDF 2Document117 paginiTrans PDF 2Briely BrizÎncă nu există evaluări
- Transmission Line MCQ 2Document49 paginiTransmission Line MCQ 2Briely Briz100% (2)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Breaker Thesis PDFDocument121 paginiBreaker Thesis PDFKarthik SriramakavachamÎncă nu există evaluări
- Latent Graph Diffusion A Unified Framework For Generation and Prediction On GraphsDocument21 paginiLatent Graph Diffusion A Unified Framework For Generation and Prediction On GraphslinkzdÎncă nu există evaluări
- MathsDocument16 paginiMathsAmith LakshmanÎncă nu există evaluări
- ProblemDocument2 paginiProblemJishnuÎncă nu există evaluări
- Measuring The Acceleration Due To Gravity LabDocument6 paginiMeasuring The Acceleration Due To Gravity Labapi-616433899Încă nu există evaluări
- PPRF Complete Research Report PDFDocument53 paginiPPRF Complete Research Report PDFGuillermo Bautista FuerteÎncă nu există evaluări
- 5.2 Orthogonal Complements and ProjectionsDocument17 pagini5.2 Orthogonal Complements and ProjectionsCostalotÎncă nu există evaluări
- Problem Set 3 (Solution)Document5 paginiProblem Set 3 (Solution)Mark AstigÎncă nu există evaluări
- PDFDocument589 paginiPDFJean Raziel Cabansag BaysonÎncă nu există evaluări
- GR 4 Mathematics 1st 4thDocument230 paginiGR 4 Mathematics 1st 4thGolden SunriseÎncă nu există evaluări
- Mphasis Aptitude Questions AnswersDocument11 paginiMphasis Aptitude Questions Answersmaccha macchaÎncă nu există evaluări
- Stat Module 5Document10 paginiStat Module 5Remar Jhon PaineÎncă nu există evaluări
- Data Science Linear RegressionDocument105 paginiData Science Linear RegressionJaime Prades KošćinaÎncă nu există evaluări
- Calculate The Gradients of The Following Linear Graphs. Remember, GradientDocument10 paginiCalculate The Gradients of The Following Linear Graphs. Remember, GradientSuman JoyÎncă nu există evaluări
- Comparative Study of RP-HPLC and UV Spectrophotometric Techniques For The Simultaneous Determination of Amoxicillin and Cloxacillin in CapsulesDocument6 paginiComparative Study of RP-HPLC and UV Spectrophotometric Techniques For The Simultaneous Determination of Amoxicillin and Cloxacillin in Capsulesiabureid7460Încă nu există evaluări
- GATE 2020 Online Test Series:: Civil EngineeringDocument6 paginiGATE 2020 Online Test Series:: Civil EngineeringAvinash JhaÎncă nu există evaluări
- Abstract Classes Versus Interfaces: C# (And Other Languages) Polymorphism Explained To Young PadawansDocument4 paginiAbstract Classes Versus Interfaces: C# (And Other Languages) Polymorphism Explained To Young Padawanssridevishinas100% (1)
- Theory Notes of Newton's Laws of Motion For NEET & IIT 2017Document18 paginiTheory Notes of Newton's Laws of Motion For NEET & IIT 2017umved singh yadav90% (10)
- GD&T PDFDocument109 paginiGD&T PDFBikash Chandra SahooÎncă nu există evaluări
- Quarter 1: Learner'S MaterialDocument39 paginiQuarter 1: Learner'S MaterialCynara AlexaÎncă nu există evaluări
- Power SeriesDocument2 paginiPower SeriesAbhi DebÎncă nu există evaluări
- Strouhal ADocument8 paginiStrouhal Asivaaero41Încă nu există evaluări
- Trade-Off Strategies in Engineering DesignDocument27 paginiTrade-Off Strategies in Engineering DesignDan SantosÎncă nu există evaluări
- The Undiscovered Self - Carl Gustav JungDocument25 paginiThe Undiscovered Self - Carl Gustav JungYusuf IrawanÎncă nu există evaluări
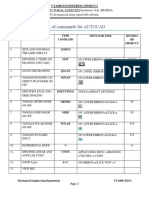
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 paginiList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelÎncă nu există evaluări
- Using Multibase Dienes For Basic Six Pupils of Assin NkranDocument41 paginiUsing Multibase Dienes For Basic Six Pupils of Assin NkranAiman UsmanÎncă nu există evaluări
- AI CLIPS TutorialDocument30 paginiAI CLIPS Tutorialintonation iÎncă nu există evaluări
- Measures of Dispersion: Greg C Elvers, PH.DDocument27 paginiMeasures of Dispersion: Greg C Elvers, PH.DorchuchiÎncă nu există evaluări
- Linear Algebra With Applications 9th Edition Leon Solutions ManualDocument32 paginiLinear Algebra With Applications 9th Edition Leon Solutions ManualLafoot BabuÎncă nu există evaluări