S-ar putea să vă placă și
- PROVA 1-VibraçoesDocument4 paginiPROVA 1-Vibraçoeswillian lopes peçanhaÎncă nu există evaluări
- Vibração Com Amortecimento ViscosoDocument11 paginiVibração Com Amortecimento ViscosoJosé LimaÎncă nu există evaluări
- 10 05.1 Artigo CassiaDocument4 pagini10 05.1 Artigo CassiaMiba InteligenteÎncă nu există evaluări
- Aerodinâmica VeicularDocument30 paginiAerodinâmica VeicularChuck LiddellÎncă nu există evaluări
- Freios 1 PDFDocument63 paginiFreios 1 PDFPaulo GomesÎncă nu există evaluări
- Vibrações MecânicaDocument12 paginiVibrações MecânicaGustavo MirandaÎncă nu există evaluări
- Aula 3 Vibrações 2019 - 2Document47 paginiAula 3 Vibrações 2019 - 2Robson OliveiraÎncă nu există evaluări
- Chassis TubularesDocument4 paginiChassis TubularesGabriel DottoÎncă nu există evaluări
- Eng Automotiva Aula 6Document48 paginiEng Automotiva Aula 6Matheus BolandiniÎncă nu există evaluări
- Aula 3Document6 paginiAula 3mateusÎncă nu există evaluări
- Eng Automotiva Aula 3Document35 paginiEng Automotiva Aula 3Matheus BolandiniÎncă nu există evaluări
- VP1 Dinâmica Das Máquinas 2019 2Document4 paginiVP1 Dinâmica Das Máquinas 2019 2Jose Rui BarbosaÎncă nu există evaluări
- Peneira Rotativa PDFDocument2 paginiPeneira Rotativa PDFFrancoÎncă nu există evaluări
- Lista 1 Segundo Semestre 2014Document10 paginiLista 1 Segundo Semestre 2014Grazielle Samara PereiraÎncă nu există evaluări
- Apostila de Vibrações MecânicasDocument22 paginiApostila de Vibrações MecânicasSávio Nunes da SilvaÎncă nu există evaluări
- Dinamica Veicular - 2022 - PRADocument34 paginiDinamica Veicular - 2022 - PRAFelipe Miranda Dos Santos100% (1)
- Mecânica de Autoveículos I - P1 - 2013 - Antônio Carlos CanaleDocument3 paginiMecânica de Autoveículos I - P1 - 2013 - Antônio Carlos CanalekhuekhueÎncă nu există evaluări
- Lista 5 TransmissibilidadeDocument4 paginiLista 5 TransmissibilidadeBruna Romanini BassoÎncă nu există evaluări
- VibraçãoDocument1 paginăVibraçãoLuciano Ferreira Dos SantosÎncă nu există evaluări
- Capítulo II - Vibração Livre de Sistemas Com Um Grau de LiberdadeDocument70 paginiCapítulo II - Vibração Livre de Sistemas Com Um Grau de LiberdadeJefferson R. MeloÎncă nu există evaluări
- 8 - Balanceamento de Massas RotativasDocument29 pagini8 - Balanceamento de Massas RotativasEveraldo FernandesÎncă nu există evaluări
- Artigo TFG II - Projeto de Barra Estabilizadora Traseira para o Veículo Baja SaeDocument27 paginiArtigo TFG II - Projeto de Barra Estabilizadora Traseira para o Veículo Baja SaeAlessander SchmitzÎncă nu există evaluări
- Unidade III - Vibrações de Sistemas Com 1 Grau de LiberdadeDocument89 paginiUnidade III - Vibrações de Sistemas Com 1 Grau de LiberdadeLuiz DanielÎncă nu există evaluări
- 9958 - Prova Vibrações Mecânicas 2022 - SUBSTITUTIVA 02Document5 pagini9958 - Prova Vibrações Mecânicas 2022 - SUBSTITUTIVA 02Gabriel Azevedo MoralÎncă nu există evaluări
- EleMec - 02 - Condição de GrashofDocument13 paginiEleMec - 02 - Condição de Grashoftheuseguigo CazarinÎncă nu există evaluări
- 5° Trabalho Vibrações PDFDocument5 pagini5° Trabalho Vibrações PDFJanderson Honorio Mazzine AfonsoÎncă nu există evaluări
- Aula 10 - Excitação Pela BaseDocument14 paginiAula 10 - Excitação Pela BaseMatheus Gama FonsecaÎncă nu există evaluări
- Experimento 6 RelatórioDocument11 paginiExperimento 6 RelatórioMaria Clara Santos QueirozÎncă nu există evaluări
- Projeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosDocument10 paginiProjeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosEliabel Alves Barreto JuniorÎncă nu există evaluări
- Balotario Mecanismos 3faseDocument14 paginiBalotario Mecanismos 3faseHector ValdiviaÎncă nu există evaluări
- Metodo Da BisseccaoDocument11 paginiMetodo Da BisseccaoVinícius LopesÎncă nu există evaluări
- ABNT NBR EB 2078 - 1990 - Bombas Hidraulicas de Fluxo RadiaDocument7 paginiABNT NBR EB 2078 - 1990 - Bombas Hidraulicas de Fluxo RadiaJairo JuniorÎncă nu există evaluări
- TCC Antonio DanielDocument105 paginiTCC Antonio DanielGabriel CorreiaÎncă nu există evaluări
- Estudo Sobre Suspensão Automotiva Focado em Veículos Off-RoadDocument6 paginiEstudo Sobre Suspensão Automotiva Focado em Veículos Off-RoadsunaramelloÎncă nu există evaluări
- Roteiro 3 Experimento Medidores de VazoDocument8 paginiRoteiro 3 Experimento Medidores de VazoFábio BernalÎncă nu există evaluări
- Análise de Vibração ForçadaDocument19 paginiAnálise de Vibração ForçadaEdson AndradeÎncă nu există evaluări
- Aula2 FragmentacaoDocument43 paginiAula2 FragmentacaoDébora Muniz de SouzaÎncă nu există evaluări
- Relatorio 1 - Vibraçoes Mecanicas PDFDocument10 paginiRelatorio 1 - Vibraçoes Mecanicas PDFYasser RodriguesÎncă nu există evaluări
- #01 - Sistemas Com 1 GDLDocument12 pagini#01 - Sistemas Com 1 GDLwillian lopes peçanhaÎncă nu există evaluări
- Balanceamento - Método de 3 PontosDocument8 paginiBalanceamento - Método de 3 PontosLuis Philipe Seles AlvesÎncă nu există evaluări
- Lista I - Vibrações MecânicasDocument2 paginiLista I - Vibrações MecânicasJonathanNeryÎncă nu există evaluări
- Formulário Vibrações Novo PDFDocument4 paginiFormulário Vibrações Novo PDFmarcioÎncă nu există evaluări
- Aula1 Vibraçoes PDFDocument55 paginiAula1 Vibraçoes PDFAlexandre GiraldiÎncă nu există evaluări
- Lista Av1Document10 paginiLista Av1Edson Gomes0% (1)
- Treinamento de Balanceamento de CampoDocument39 paginiTreinamento de Balanceamento de Campomauricio duberger lopesÎncă nu există evaluări
- Exercíicos Aula 3 - Sistemas Equivalentes - SoluçõesDocument11 paginiExercíicos Aula 3 - Sistemas Equivalentes - SoluçõesMarcos Freitas0% (1)
- Manual Tecnico Elleva Max 500 PortDocument36 paginiManual Tecnico Elleva Max 500 PortCarlos AugustoÎncă nu există evaluări
- Uma Discussão Sobre Transferência de Peso Lateral Estado-Fácil e Como Usá-Lo Na Configuraçaõ PDFDocument43 paginiUma Discussão Sobre Transferência de Peso Lateral Estado-Fácil e Como Usá-Lo Na Configuraçaõ PDFAlef GoncalvesÎncă nu există evaluări
- Apostila Básica para Curso de FresamentoDocument19 paginiApostila Básica para Curso de FresamentoMarcos RobertoÎncă nu există evaluări
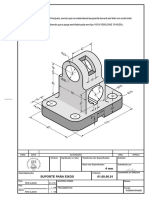
- 01.00.00.01 - Suporte para EixosDocument3 pagini01.00.00.01 - Suporte para EixosGuilherme PeicheÎncă nu există evaluări
- Exercícios de Vibrações MecânicasDocument46 paginiExercícios de Vibrações MecânicasFã boy do Atilinha100% (1)
- MecDocument71 paginiMecUeiglas VanderleiÎncă nu există evaluări
- 1a Lista ExerciciosDocument3 pagini1a Lista ExerciciosBernardo LemosÎncă nu există evaluări
- Vibrações Mecânicas - Tópico 1 - Aula 1 - Construção de Modelos VibratóriosDocument59 paginiVibrações Mecânicas - Tópico 1 - Aula 1 - Construção de Modelos VibratóriosPolly CruzÎncă nu există evaluări
- ClaudioKRS ARTDocument9 paginiClaudioKRS ARTcarlos.ivens.nascimentoÎncă nu există evaluări
- Vibrações 2Document10 paginiVibrações 2Vinicius FratiniÎncă nu există evaluări
- Dayvison e Italo - Relat 1 - Modos NormaisDocument15 paginiDayvison e Italo - Relat 1 - Modos NormaisItalo RodriguesÎncă nu există evaluări
- Índices De Instabilidade: O Que São E Para Que Servem?De la EverandÍndices De Instabilidade: O Que São E Para Que Servem?Încă nu există evaluări
- Comprovante de SolicitacaoDocument1 paginăComprovante de SolicitacaoEnzo Gomes KohlertÎncă nu există evaluări
- ATIVIDADES DE HISTÓRIA (2) VLDocument4 paginiATIVIDADES DE HISTÓRIA (2) VLEnzo Gomes KohlertÎncă nu există evaluări
- Introdução Ao Direito Processual - Aula 1Document16 paginiIntrodução Ao Direito Processual - Aula 1Enzo Gomes KohlertÎncă nu există evaluări
- Fases Metodológicas Do ProcessoDocument32 paginiFases Metodológicas Do ProcessoEnzo Gomes KohlertÎncă nu există evaluări
- Direito Das ObrigaçõesDocument24 paginiDireito Das ObrigaçõesEnzo Gomes KohlertÎncă nu există evaluări
- Jurisdição - Parte IDocument6 paginiJurisdição - Parte IEnzo Gomes KohlertÎncă nu există evaluări
- Teoria Geral Do DireitoDocument45 paginiTeoria Geral Do DireitoEnzo Gomes KohlertÎncă nu există evaluări
- Introdução A FilosofiaDocument26 paginiIntrodução A FilosofiaEnzo Gomes KohlertÎncă nu există evaluări
- Modelo Trabalho de História 2019Document6 paginiModelo Trabalho de História 2019Enzo Gomes KohlertÎncă nu există evaluări
- Teoria Geral Do DireitoDocument45 paginiTeoria Geral Do DireitoEnzo Gomes KohlertÎncă nu există evaluări
- ECONOMIADocument2 paginiECONOMIAEnzo Gomes KohlertÎncă nu există evaluări
- Imigração - Enzo, Rhyan, Caio, João Marcos e CarlosDocument9 paginiImigração - Enzo, Rhyan, Caio, João Marcos e CarlosEnzo Gomes KohlertÎncă nu există evaluări
- Enzo Gomes Kohlert, Cap. 5 Do Livro Tirania Do MéritoDocument2 paginiEnzo Gomes Kohlert, Cap. 5 Do Livro Tirania Do MéritoEnzo Gomes KohlertÎncă nu există evaluări
- Discurso de Formação M14Document3 paginiDiscurso de Formação M14Enzo Gomes KohlertÎncă nu există evaluări
- Teoria FreudianaDocument11 paginiTeoria FreudianaEnzo Gomes KohlertÎncă nu există evaluări
- Atividade Ferramentas - 04 - 11Document3 paginiAtividade Ferramentas - 04 - 11Enzo Gomes KohlertÎncă nu există evaluări
- Lista de Exercícios Primeiro AnoDocument1 paginăLista de Exercícios Primeiro AnoEnzo Gomes KohlertÎncă nu există evaluări
- Enzo Gomes Kohlert, Capítulo 8Document2 paginiEnzo Gomes Kohlert, Capítulo 8Enzo Gomes KohlertÎncă nu există evaluări
- Enzo Gomes Kohlert, Prova Segundo SemestreDocument6 paginiEnzo Gomes Kohlert, Prova Segundo SemestreEnzo Gomes KohlertÎncă nu există evaluări
- 1 - Fil02457 - Filosofia Politica IDocument1 pagină1 - Fil02457 - Filosofia Politica IEnzo Gomes KohlertÎncă nu există evaluări
- Agropecuaria SubdesenvolvidaDocument27 paginiAgropecuaria SubdesenvolvidaEnzo Gomes KohlertÎncă nu există evaluări
- PPC 2018 Bach MatematicaDocument49 paginiPPC 2018 Bach MatematicaEnzo Gomes KohlertÎncă nu există evaluări
- Uma Leitura Acerca Da Ciência Da Lógica Como Filosofia Primeira de HegelDocument14 paginiUma Leitura Acerca Da Ciência Da Lógica Como Filosofia Primeira de HegelDanilo BorinÎncă nu există evaluări
- Manutencao MecanicaDocument7 paginiManutencao MecanicaEnzo Gomes KohlertÎncă nu există evaluări
- Lista 01 - SoldagemDocument4 paginiLista 01 - SoldagemEnzo Gomes KohlertÎncă nu există evaluări
- Refrigeracao Ar CondicionadoDocument9 paginiRefrigeracao Ar CondicionadoEnzo Gomes KohlertÎncă nu există evaluări
- Binômio de NewtonDocument4 paginiBinômio de NewtonEnzo Gomes KohlertÎncă nu există evaluări
- ProbabilidadeDocument2 paginiProbabilidadeEnzo Gomes KohlertÎncă nu există evaluări
- Binômio de NewtonDocument2 paginiBinômio de NewtonEnzo Gomes KohlertÎncă nu există evaluări
- ProbabilidadeDocument5 paginiProbabilidadeEnzo Gomes KohlertÎncă nu există evaluări
- APOIO-Aula-Apostila Concreto Protendido 2Document21 paginiAPOIO-Aula-Apostila Concreto Protendido 2Gustavo ManicaÎncă nu există evaluări
- GGG40 - EN-GJS-400-15 - Fundição DijkkampDocument3 paginiGGG40 - EN-GJS-400-15 - Fundição Dijkkampengenharia metalicaÎncă nu există evaluări
- Avaliação Pá Mecânica - GabaritoDocument3 paginiAvaliação Pá Mecânica - GabaritoMAQ TrainingsÎncă nu există evaluări
- Atividade Fisica Aceleração e MuDocument1 paginăAtividade Fisica Aceleração e MuMarianna MoroÎncă nu există evaluări
- 2 Lista de Exercicios Do 3 Ano EM 4 Bim 2011 FIS C Massa-Mola Pend SimplesDocument4 pagini2 Lista de Exercicios Do 3 Ano EM 4 Bim 2011 FIS C Massa-Mola Pend SimplesDiego CiênciaÎncă nu există evaluări
- Degradação de PolímerosDocument2 paginiDegradação de Polímerosvanusa gomesÎncă nu există evaluări
- Ciclo Diag - Volume 14 PDFDocument260 paginiCiclo Diag - Volume 14 PDFgabrielzinho43100% (2)
- Kh-Solo e Kv-Solo - EberickDocument10 paginiKh-Solo e Kv-Solo - EberickLeandro Willian FreitasÎncă nu există evaluări
- Questões - SoldagemDocument7 paginiQuestões - SoldagemRamon MouraÎncă nu există evaluări
- FormulárioDocument9 paginiFormulárioGabriel QuinhonesÎncă nu există evaluări
- Avaliação Trator Esteiras - GabaritoDocument3 paginiAvaliação Trator Esteiras - GabaritoMAQ Trainings100% (1)
- Sebenta - Fenómenos de Transporte I - Cap6Document18 paginiSebenta - Fenómenos de Transporte I - Cap6Malcolm AntonioÎncă nu există evaluări
- ANSYS Elemento Link 1Document2 paginiANSYS Elemento Link 1CarlosWilliamAlmeidaÎncă nu există evaluări
- FT - FQA11 - Equilíbrio QuímicoDocument5 paginiFT - FQA11 - Equilíbrio QuímicoRui RodriguesÎncă nu există evaluări
- APOL 02, Química GeralDocument3 paginiAPOL 02, Química GeralSilas SampaioÎncă nu există evaluări
- Avaliação Das Instalações em Aviários de PosturaDocument68 paginiAvaliação Das Instalações em Aviários de PosturaGeraldo Nido OliveiraÎncă nu există evaluări
- 3451 GMV VDocument12 pagini3451 GMV VBlasphem NekÎncă nu există evaluări
- ICM - Caracterização de Argilas (Relatório)Document9 paginiICM - Caracterização de Argilas (Relatório)nat06Încă nu există evaluări
- QT ConteudosDocument31 paginiQT ConteudosSonex SualeheÎncă nu există evaluări
- Atividade Teoria de Estrutura 310721Document9 paginiAtividade Teoria de Estrutura 310721Ingénieur Molaisse Phoenix David0% (3)
- Trabalho Fundicao - AplicacaoDocument1 paginăTrabalho Fundicao - AplicacaotchetchetchetcheÎncă nu există evaluări
- 14 - LentesDocument5 pagini14 - LentesflaviomirandadesouzaÎncă nu există evaluări
- Exercícios de Equilíbrio Químico - Profº Agamenon RobertoDocument46 paginiExercícios de Equilíbrio Químico - Profº Agamenon Robertocb_penatrujillo92% (26)
- W8Document90 paginiW8tiago calderÎncă nu există evaluări
- Aula 03 - Cinemtica Dos Corpos RígidosDocument56 paginiAula 03 - Cinemtica Dos Corpos RígidosSergioÎncă nu există evaluări
- Mudanças de Estado Físico Da MatériaDocument1 paginăMudanças de Estado Físico Da MatériaSolange Alves de MatosÎncă nu există evaluări
- Prática O MOTOR SÍNCRONO E A CORREÇÃO DO FATOR DE POTÊNCIADocument3 paginiPrática O MOTOR SÍNCRONO E A CORREÇÃO DO FATOR DE POTÊNCIAPaulo HenriqueÎncă nu există evaluări
- Critérios de EscoamentoDocument20 paginiCritérios de EscoamentoGdamatta yahoo.com.br Da MattaÎncă nu există evaluări
- Prova 9º AnoDocument3 paginiProva 9º AnoJéssica LayneÎncă nu există evaluări
- Cálculo de Dissipadores de CalorDocument5 paginiCálculo de Dissipadores de CalormaurilioctbaÎncă nu există evaluări