S-ar putea să vă placă și
- Fisica Regular-Semana #05 Docentes PDFDocument3 paginiFisica Regular-Semana #05 Docentes PDFRafael Durand DurandÎncă nu există evaluări
- Preades Semana 05 Enero-Marzo 2018 Con Resaltos PDFDocument4 paginiPreades Semana 05 Enero-Marzo 2018 Con Resaltos PDFRafael Durand DurandÎncă nu există evaluări
- Electrodinámica Cepre Uni 2021-2Document27 paginiElectrodinámica Cepre Uni 2021-2FRANÎncă nu există evaluări
- Física - 4°-II Bal-Bim - 21Document6 paginiFísica - 4°-II Bal-Bim - 21Isabel Allende PomianoÎncă nu există evaluări
- Colision de ParticulasDocument15 paginiColision de ParticulasMARCELOÎncă nu există evaluări
- SEMANA 05 CINEMÁTICA III M.C. y M. Del Cuerpo Rigido 2009 BDocument34 paginiSEMANA 05 CINEMÁTICA III M.C. y M. Del Cuerpo Rigido 2009 BWalter Lauro Perez Terrel50% (2)
- Balotario GEOMETRIA - AC2-AC1-5to NicolDocument5 paginiBalotario GEOMETRIA - AC2-AC1-5to NicolEduard GiancarlommÎncă nu există evaluări
- Parcial Biofísica CBC UbaDocument1 paginăParcial Biofísica CBC UbaprofepeloverdeÎncă nu există evaluări
- Física Sem2 PitágorasDocument6 paginiFísica Sem2 PitágorasZagar SantosÎncă nu există evaluări
- Preguntas de FisicaDocument10 paginiPreguntas de FisicaRosa100% (1)
- Centro de MasaDocument21 paginiCentro de MasaWallo48100% (1)
- Espectros de Emisión de GasesDocument1 paginăEspectros de Emisión de GasesMaríaIsabelLarrivaÎncă nu există evaluări
- 2.4 Fórmula Integral de Cauchy - Teorema de Cauchy (Variable Compleja)Document2 pagini2.4 Fórmula Integral de Cauchy - Teorema de Cauchy (Variable Compleja)Luis GarcíaÎncă nu există evaluări
- Practica Dinamica LinealDocument2 paginiPractica Dinamica LinealAnthony Ortega Jiménez0% (1)
- Prueba Resuelta de Química Ing - Nov 2013Document10 paginiPrueba Resuelta de Química Ing - Nov 2013Gustavo Contreras TrujilloÎncă nu există evaluări
- Problemas Adicionales de Fisica Estadística: Ángel Hierro Gardeta Alejandro Jesús Pérez AparicioDocument2 paginiProblemas Adicionales de Fisica Estadística: Ángel Hierro Gardeta Alejandro Jesús Pérez AparicioJL DazaÎncă nu există evaluări
- Com 10TDocument3 paginiCom 10TAlexis Esmith Castañeda RequejoÎncă nu există evaluări
- 1er Material de Estudio PRE 2021-2Document50 pagini1er Material de Estudio PRE 2021-2Johan Enrique50% (2)
- 1movimiento Rectilineo Uniforme I - FISICA 1° - Sem 1Document6 pagini1movimiento Rectilineo Uniforme I - FISICA 1° - Sem 1JesusAvalosGuerreroÎncă nu există evaluări
- QUIMICA GENERAL Unidades PDFDocument281 paginiQUIMICA GENERAL Unidades PDFLechero De Corazon MHÎncă nu există evaluări
- Relación entre el periodo y la longitud en un péndulo simpleDocument10 paginiRelación entre el periodo y la longitud en un péndulo simpleAlvaro Espinoza TorresÎncă nu există evaluări
- Repaso San Marcos Semana 01 - Física - Nivel Pre UNI-UNMSMDocument6 paginiRepaso San Marcos Semana 01 - Física - Nivel Pre UNI-UNMSMMaster XdÎncă nu există evaluări
- Asimov - Ejercicios Revisados BiofísicaDocument46 paginiAsimov - Ejercicios Revisados BiofísicaCeleste MaguireÎncă nu există evaluări
- Teoria Semana IIIDocument39 paginiTeoria Semana IIIDiego CesarÎncă nu există evaluări
- Trabajo DinamicaDocument15 paginiTrabajo DinamicacarlosÎncă nu există evaluări
- Hoja 9. Resolución de TriángulosDocument3 paginiHoja 9. Resolución de TriángulosSa PeYaÎncă nu există evaluări
- Examen de MetalurgiaDocument2 paginiExamen de MetalurgiaDarwin Fisher RLÎncă nu există evaluări
- 004 - Elements of X-Ray Diffraction CullityDocument21 pagini004 - Elements of X-Ray Diffraction CullityJorge De Jesus Torres ReyesÎncă nu există evaluări
- Libro Fisica Basica 99 122Document24 paginiLibro Fisica Basica 99 122Rodolfo UreñaÎncă nu există evaluări
- Esfuerzos AxilesDocument29 paginiEsfuerzos AxilesIvanÎncă nu există evaluări
- 1 Ley de La TermodiniamicaDocument6 pagini1 Ley de La TermodiniamicaDeivid Carvajal CcoilloÎncă nu există evaluări
- Péndulo FísicoDocument9 paginiPéndulo FísicoJeronimo CorniolaÎncă nu există evaluări
- Simulación Con Microondas de La Difracción de Rayos X en Un CristalDocument5 paginiSimulación Con Microondas de La Difracción de Rayos X en Un CristalJaime Rocha MunozÎncă nu există evaluări
- DIFRACCION: ANALISIS DE PATRONES ÓPTICOSDocument4 paginiDIFRACCION: ANALISIS DE PATRONES ÓPTICOSKaren Lorena MonroyÎncă nu există evaluări
- Teorema de PappusDocument29 paginiTeorema de PappusLisbeth AraqueÎncă nu există evaluări
- Semana 07Document4 paginiSemana 07JofytYoveraTroncosÎncă nu există evaluări
- Semana 09 DINÁMICA Fisica I UNAC 2009 BDocument39 paginiSemana 09 DINÁMICA Fisica I UNAC 2009 BWalter Lauro Perez TerrelÎncă nu există evaluări
- Material de trabajo – Física IDocument2 paginiMaterial de trabajo – Física IJhon Delacruz TaipeÎncă nu există evaluări
- 4 Algebra I - Mendoza UNMSMDocument4 pagini4 Algebra I - Mendoza UNMSMFelipeÎncă nu există evaluări
- Modelos MatemáticosDocument26 paginiModelos MatemáticosBeebobÎncă nu există evaluări
- P.C. #12 - Fricción o RozamientoDocument4 paginiP.C. #12 - Fricción o Rozamientodaniexv91Încă nu există evaluări
- Trigonometria EsfericaDocument10 paginiTrigonometria EsfericaIvailo ApitzÎncă nu există evaluări
- Leyes de Newton y Trabajo en Tarea de FísicaDocument2 paginiLeyes de Newton y Trabajo en Tarea de FísicaCristhian Neira0% (1)
- 1er - Boletin 1eropcion AritmeticaDocument35 pagini1er - Boletin 1eropcion AritmeticaFranklim Soncco0% (1)
- Cinemática-MruDocument3 paginiCinemática-MruGustavo Huaman VilchezÎncă nu există evaluări
- Sintesis y Caracterizacion Del Jabon A Partir Del Aceite de CocoDocument6 paginiSintesis y Caracterizacion Del Jabon A Partir Del Aceite de CocoVALERIA ALEJANDRA VILLEGAS ALVAREZÎncă nu există evaluări
- Gua 20 Suficiencia de Datos-GeometrDocument12 paginiGua 20 Suficiencia de Datos-GeometrBernardita CaceresÎncă nu există evaluări
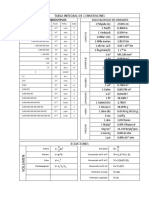
- Tabla Integral de ConversionDocument2 paginiTabla Integral de ConversionMichael SandiaÎncă nu există evaluări
- Volumen de Cono y EsferaDocument7 paginiVolumen de Cono y Esferaalfonsito2004Încă nu există evaluări
- Fis Hidros NArapaDocument27 paginiFis Hidros NArapaCarlitos Barreda CabreraÎncă nu există evaluări
- Movimiento Circunferencial UniformeDocument12 paginiMovimiento Circunferencial UniformemaklinfÎncă nu există evaluări
- ElectrostaticaDocument2 paginiElectrostaticaJosé MebarakÎncă nu există evaluări
- Medición de incertidumbres en práctica de laboratorioDocument1 paginăMedición de incertidumbres en práctica de laboratorioAna Cristina Ayllón VelardeÎncă nu există evaluări
- Ejercicio 1RESUELTOSDocument5 paginiEjercicio 1RESUELTOSJesus RiveraÎncă nu există evaluări
- PLANEAMIENTO2023 Bio Udelas-1Document10 paginiPLANEAMIENTO2023 Bio Udelas-1educ2008100% (1)
- Tomo II Física IIDocument26 paginiTomo II Física IIGeorge Chang Kai TongÎncă nu există evaluări
- Clase de Fisca TermoDocument5 paginiClase de Fisca TermoJohn Wuiliams Aguilar LizaÎncă nu există evaluări
- Ejercicios Resueltos ElectrostaticaDocument8 paginiEjercicios Resueltos ElectrostaticaLuis RodriguezÎncă nu există evaluări
- Covarianza Del ElectromagnetismoDocument3 paginiCovarianza Del ElectromagnetismoAnderson Vergaray AcevedoÎncă nu există evaluări
- Clase Itera 2016Document90 paginiClase Itera 2016Anderson Vergaray AcevedoÎncă nu există evaluări
- Clase 14 NDICES DE MILLER PARA PLANOS Y DIRECCIONES CRISTALINOS 2014 2 PDFDocument2 paginiClase 14 NDICES DE MILLER PARA PLANOS Y DIRECCIONES CRISTALINOS 2014 2 PDFRafael PimentelÎncă nu există evaluări
- Guía 2017Document54 paginiGuía 2017Anderson Vergaray AcevedoÎncă nu există evaluări
- Guía 2017Document54 paginiGuía 2017Anderson Vergaray AcevedoÎncă nu există evaluări
- Covarianza Del ElectromagnetismoDocument3 paginiCovarianza Del ElectromagnetismoAnderson Vergaray AcevedoÎncă nu există evaluări
- Diferencias Entre Metafisica y Dialectica ExamenDocument1 paginăDiferencias Entre Metafisica y Dialectica Examenaymei100% (1)
- Introduccion A La Cristalografia GeometricaDocument148 paginiIntroduccion A La Cristalografia GeometricaDiego Loaiza0% (1)
- Variable Compleja y Aplicaciones - Churchill PDFDocument210 paginiVariable Compleja y Aplicaciones - Churchill PDFLuis Velásquez100% (1)
- Capitulo2 PDFDocument20 paginiCapitulo2 PDFAnderson Vergaray AcevedoÎncă nu există evaluări
- BiodegradacionDocument41 paginiBiodegradacionluis angel mancera caroÎncă nu există evaluări
- El Fraude de Chivo WalletDocument7 paginiEl Fraude de Chivo WalletYuri Rodyl Cruz MartínezÎncă nu există evaluări
- Historia y evolución del mantenimiento industrialDocument10 paginiHistoria y evolución del mantenimiento industrialAlejandro PuenteÎncă nu există evaluări
- Aplicaciones Al Área de ArquitecturaDocument6 paginiAplicaciones Al Área de ArquitecturaLuisAngelOsunaEstrada0% (2)
- Colocacion Implantes Paso A Paso IIDocument65 paginiColocacion Implantes Paso A Paso IIperiopuello100% (1)
- Propuesta de Plan de Implementación 2022 SemiprencialidadDocument45 paginiPropuesta de Plan de Implementación 2022 Semiprencialidaddeyvi system100% (1)
- Las Tres Leyes de Desempeño Fue Escrito Por Steve Zaffron y Dave LoganDocument2 paginiLas Tres Leyes de Desempeño Fue Escrito Por Steve Zaffron y Dave LoganOsvaldo gonzalezÎncă nu există evaluări
- Rosa y Carolina Agazzi: Sus principios educativosDocument2 paginiRosa y Carolina Agazzi: Sus principios educativosSalva Gimenez NavasÎncă nu există evaluări
- Actividad 03 - NormogramaDocument11 paginiActividad 03 - NormogramaDani MosqueraÎncă nu există evaluări
- P 51Document14 paginiP 51Javier GorzaÎncă nu există evaluări
- Desarrollo habilidades psicoterapiaDocument7 paginiDesarrollo habilidades psicoterapiawookieman2010Încă nu există evaluări
- LENGUAJEDocument2 paginiLENGUAJEYoselyn Esther Flores CarmonaÎncă nu există evaluări
- Ir-Pr-Civ-05, Rev 0. Demolicion de Carpeta Asfaltica...Document7 paginiIr-Pr-Civ-05, Rev 0. Demolicion de Carpeta Asfaltica...kengely24100% (1)
- Junin-CA-Depuracion de Las Aguas Del RioDocument16 paginiJunin-CA-Depuracion de Las Aguas Del RioJorge Luis Rojas DiezÎncă nu există evaluări
- Rompe Hielo - ExpresionDocument2 paginiRompe Hielo - ExpresionDaniel FuentesÎncă nu există evaluări
- Presentacion para ContratistasDocument96 paginiPresentacion para Contratistasums.recursoshumanos1Încă nu există evaluări
- Aplicación de Las MatematicasDocument7 paginiAplicación de Las Matematicasandrea cumbalÎncă nu există evaluări
- Contenidosyprocesos PropuestaDocument2 paginiContenidosyprocesos PropuestaTrabajoÎncă nu există evaluări
- Análisis de MensajesDocument6 paginiAnálisis de MensajesPavel DelgadoÎncă nu există evaluări
- Mediacion Proyecto Consultorio Juridicos Ucc PastoDocument17 paginiMediacion Proyecto Consultorio Juridicos Ucc PastoJuan Sebastian Rosero PÎncă nu există evaluări
- Hidrograma Tipico Gamarra Ulloa CapuñayDocument9 paginiHidrograma Tipico Gamarra Ulloa CapuñayMarcelo Herrera SanchezÎncă nu există evaluări
- Capacitación Manual de BioseguridadDocument22 paginiCapacitación Manual de BioseguridadEdwin SanchezÎncă nu există evaluări
- Proyecto de Instalacion Electrica de Una Casa HabitacionDocument23 paginiProyecto de Instalacion Electrica de Una Casa Habitaciondiego fernandezÎncă nu există evaluări
- SE-OE-XI.1 Pruebas Preoperativas y Puesta en ServicioDocument4 paginiSE-OE-XI.1 Pruebas Preoperativas y Puesta en ServiciojonklanÎncă nu există evaluări
- Construcción Cancha Fútbol 7 Pasto SintéticoDocument7 paginiConstrucción Cancha Fútbol 7 Pasto SintéticoJorge Alexis Pérez MartínezÎncă nu există evaluări
- Ensayo Sobre Industria Creativa y CulturalDocument1 paginăEnsayo Sobre Industria Creativa y Culturallola duarteÎncă nu există evaluări
- Tecnología y Artística - Grado QuintoDocument3 paginiTecnología y Artística - Grado Quintogladys zea plazasÎncă nu există evaluări
- Proyecto - Vedia Zenteno DavidDocument8 paginiProyecto - Vedia Zenteno DavidareloÎncă nu există evaluări
- Mitra Capítulo 9 - La Educación Mínimamente InvasivaDocument16 paginiMitra Capítulo 9 - La Educación Mínimamente Invasivacandela gonzalezÎncă nu există evaluări
- 10 Semana 10-GENERADOR de PotenciaDocument17 pagini10 Semana 10-GENERADOR de PotenciaMabu GojeÎncă nu există evaluări