S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Handbook of Ship Calculations, Construction and OperationDocument776 paginiHandbook of Ship Calculations, Construction and OperationYuriyAK91% (11)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Inclining Experiment 111Document7 paginiInclining Experiment 111Rahul PhadakeÎncă nu există evaluări
- Inverted Delta Wig Effect Aircraft 1Document92 paginiInverted Delta Wig Effect Aircraft 1xxxguysÎncă nu există evaluări
- Carriage of GrainDocument11 paginiCarriage of GrainAndrija BoskovicÎncă nu există evaluări
- Short Condition Survey Report-2012-1Document7 paginiShort Condition Survey Report-2012-1alive2flirtÎncă nu există evaluări
- Stability and TrimDocument27 paginiStability and TrimДмитрий ЯрычÎncă nu există evaluări
- WP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012Document52 paginiWP 2 - Report 4 - Resistance and Propulsion Power - FINAL - October 2012jimmyy90Încă nu există evaluări
- Safety Guidelines For Design, Construction & Operation of TugsDocument50 paginiSafety Guidelines For Design, Construction & Operation of TugsTomash Verbitsky100% (2)
- Mec Aug12Document88 paginiMec Aug12Fermin Arteaga RiveraÎncă nu există evaluări
- Maxsurf Hydromax TrainingDocument20 paginiMaxsurf Hydromax Trainingramy abaza100% (1)
- Liquefaction of Bulk CargoesDocument24 paginiLiquefaction of Bulk CargoesAlexEcnom100% (1)
- Captain Ysr QuestionsDocument40 paginiCaptain Ysr QuestionsDin100% (1)
- Lashing Containers On DeckDocument10 paginiLashing Containers On DeckReda HmrÎncă nu există evaluări
- Marine Survey Practice - Surveyor Guide Notes For Ship Stability, Inclining Test ProcedureDocument11 paginiMarine Survey Practice - Surveyor Guide Notes For Ship Stability, Inclining Test ProcedureshahjadaÎncă nu există evaluări
- TRB Fungsi 2 SinduDocument82 paginiTRB Fungsi 2 Sinduinovia darnaÎncă nu există evaluări
- 405 4Document65 pagini405 4y_596688032Încă nu există evaluări
- B.5.2 Bulk Carrier Structure Details: Figure B.5.2: Typical Midship Section Nomenclature For Bulk CarriersDocument56 paginiB.5.2 Bulk Carrier Structure Details: Figure B.5.2: Typical Midship Section Nomenclature For Bulk Carriersy_596688032Încă nu există evaluări
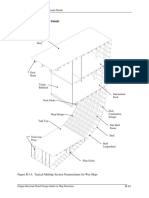
- B.5.4 Warship Structure Details: Figure B.5.4: Typical Midship Section Nomenclature For War ShipsDocument28 paginiB.5.4 Warship Structure Details: Figure B.5.4: Typical Midship Section Nomenclature For War Shipsy_596688032Încă nu există evaluări
- M B P RDocument73 paginiM B P Ry_596688032Încă nu există evaluări
- Fatigue-Resistant Detail Design Guide For Ship StructuresDocument79 paginiFatigue-Resistant Detail Design Guide For Ship Structuresy_596688032Încă nu există evaluări
- Ship Operations in Cold Climate: DNV MaritimeDocument4 paginiShip Operations in Cold Climate: DNV Maritimey_596688032Încă nu există evaluări
- Fatigue-Resistant Detail Design Guide For Ship StructuresDocument6 paginiFatigue-Resistant Detail Design Guide For Ship Structuresy_596688032Încă nu există evaluări
- Mixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen UniversityDocument10 paginiMixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen Universityy_596688032Încă nu există evaluări
- A Simple Formula For Insertion Loss Prediction of Large Acoustical Enclosures Using Statistical Energy Analysis MethodDocument10 paginiA Simple Formula For Insertion Loss Prediction of Large Acoustical Enclosures Using Statistical Energy Analysis MethodIngLuigiDiFrancescoÎncă nu există evaluări
- Brosjyre Tankers - QXDDocument8 paginiBrosjyre Tankers - QXDy_596688032Încă nu există evaluări
- A Mathematical Scheme For Calculation of Lift of Planing Crafts With Large Mean Wetted Length and A Comparative Study of Effective ParametersDocument20 paginiA Mathematical Scheme For Calculation of Lift of Planing Crafts With Large Mean Wetted Length and A Comparative Study of Effective Parametersy_596688032Încă nu există evaluări
- PublistJuly2003 tcm4-10019Document12 paginiPublistJuly2003 tcm4-10019y_596688032Încă nu există evaluări
- DNV Supports The Tanker IndustryDocument4 paginiDNV Supports The Tanker Industryy_596688032Încă nu există evaluări
- Small Craft Weigth PredictionDocument12 paginiSmall Craft Weigth PredictionFederico Babich100% (1)
- Small Craft Weigth PredictionDocument12 paginiSmall Craft Weigth PredictionFederico Babich100% (1)
- 7000CBM LNG Tanker PoweringDocument39 pagini7000CBM LNG Tanker Poweringy_596688032Încă nu există evaluări
- Mixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen UniversityDocument10 paginiMixed-Integer Quadrangulation: David Bommes Henrik Zimmer Leif Kobbelt RWTH Aachen Universityy_596688032Încă nu există evaluări
- Parametric Rolling at Main Resonance: Dan Obreja Radoslav NABERGOJ Liviu CRUDU Sandita PACURARU (Popoiu)Document8 paginiParametric Rolling at Main Resonance: Dan Obreja Radoslav NABERGOJ Liviu CRUDU Sandita PACURARU (Popoiu)y_596688032Încă nu există evaluări
- 1349 NotesDocument152 pagini1349 NotesnatalaricÎncă nu există evaluări
- Finding The Hull Form For Given Seakeeping Characteristics PDFDocument8 paginiFinding The Hull Form For Given Seakeeping Characteristics PDFy_596688032Încă nu există evaluări
- Finding The Hull Form For Given Seakeeping Characteristics PDFDocument8 paginiFinding The Hull Form For Given Seakeeping Characteristics PDFy_596688032Încă nu există evaluări
- Parametric Rolling at Main Resonance: Dan Obreja Radoslav NABERGOJ Liviu CRUDU Sandita PACURARU (Popoiu)Document8 paginiParametric Rolling at Main Resonance: Dan Obreja Radoslav NABERGOJ Liviu CRUDU Sandita PACURARU (Popoiu)y_596688032Încă nu există evaluări
- 2005 05Document393 pagini2005 05Kenneth LeeÎncă nu există evaluări
- BaanDocument68 paginiBaany_596688032Încă nu există evaluări
- 1557 PDFDocument26 pagini1557 PDFy_596688032Încă nu există evaluări
- A Simple Formula For Insertion Loss Prediction of Large Acoustical Enclosures Using Statistical Energy Analysis MethodDocument10 paginiA Simple Formula For Insertion Loss Prediction of Large Acoustical Enclosures Using Statistical Energy Analysis MethodIngLuigiDiFrancescoÎncă nu există evaluări
- 1557 PDFDocument26 pagini1557 PDFy_596688032Încă nu există evaluări
- 2313Document4 pagini2313y_596688032Încă nu există evaluări
- Structural Members of A Ship: Unit 2Document12 paginiStructural Members of A Ship: Unit 2sathi11189Încă nu există evaluări
- MGN 280-2Document148 paginiMGN 280-2Scott Ross MooreÎncă nu există evaluări
- Calculation of Stability For Ships Carrying Bulk GrainDocument11 paginiCalculation of Stability For Ships Carrying Bulk GrainЕкатерина РожковаÎncă nu există evaluări
- Report 27 - 5 - 17Document84 paginiReport 27 - 5 - 17Arun K RajÎncă nu există evaluări
- Naval QB Jan 2010 Apr 2016Document47 paginiNaval QB Jan 2010 Apr 2016Sanjay Kumar100% (2)
- The Implementation of SOLAS 1960: Marine TechnologyDocument6 paginiThe Implementation of SOLAS 1960: Marine TechnologyMichel IsereÎncă nu există evaluări
- Imo 1989 - A649Document98 paginiImo 1989 - A649bratkpÎncă nu există evaluări
- Block LoadingDocument3 paginiBlock Loadingagite1212Încă nu există evaluări
- PollutionDocument84 paginiPollutionbernardinodinoÎncă nu există evaluări
- QB NavarcDocument33 paginiQB Navarckum512100% (1)
- Analysis of The Impact of The Unified Main Dimensions On The Productivity of Shipbuilding SmeDocument9 paginiAnalysis of The Impact of The Unified Main Dimensions On The Productivity of Shipbuilding SmeПетър ГеоргиевÎncă nu există evaluări
- (Vol A), 2015 Guidance For FRP and Wooden Fishing Vessel Up To 24 M, 2015Document139 pagini(Vol A), 2015 Guidance For FRP and Wooden Fishing Vessel Up To 24 M, 2015Dandy Adrianto0% (1)
- CR Contact ReferenceDocument6 paginiCR Contact ReferenceMuchammatAlvinurÎncă nu există evaluări
- General Cargoes HazardDocument9 paginiGeneral Cargoes Hazardtom80% (5)
- 305 - The Sinking of KM BJL Ship in Tanjung FixDocument9 pagini305 - The Sinking of KM BJL Ship in Tanjung FixPramavirsa WnwÎncă nu există evaluări
- SD 1.1.3 Design CriteriaDocument10 paginiSD 1.1.3 Design Criterianapoleonpt2Încă nu există evaluări
- Optimization of The Tank Rotating Machine in Estanc AsDocument81 paginiOptimization of The Tank Rotating Machine in Estanc AssauravÎncă nu există evaluări