S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Aerials & Radio Frequency PropagationDocument30 paginiAerials & Radio Frequency Propagationjoeven64Încă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Radio Frequency PlanDocument40 paginiRadio Frequency PlanuzmmbÎncă nu există evaluări
- Radar Magnetrons Product GuideDocument27 paginiRadar Magnetrons Product GuideMahfooz Ali100% (2)
- Microwave Frequency Planning GuideDocument38 paginiMicrowave Frequency Planning GuideAdesoji Lawal100% (1)
- 8-Shipboard External CommunicationsDocument64 pagini8-Shipboard External CommunicationsErnestoDom50% (4)
- Radar Frequency Bands Band Name Frequency Range Wavelength Range NotesDocument4 paginiRadar Frequency Bands Band Name Frequency Range Wavelength Range NotesKaharul AfandiÎncă nu există evaluări
- Millimeter Wave Microstrip Patch Antenna For 5G MoDocument6 paginiMillimeter Wave Microstrip Patch Antenna For 5G MoOwaisKhanÎncă nu există evaluări
- Wave Propagation & Antennas: Lab Report # 1Document4 paginiWave Propagation & Antennas: Lab Report # 1Shahzeb AwanÎncă nu există evaluări
- Impact of Roof Types on Reducing ELF Magnetic Field Intensity Below 150 kV Transmission LinesDocument9 paginiImpact of Roof Types on Reducing ELF Magnetic Field Intensity Below 150 kV Transmission Linesrizky maulidiyahÎncă nu există evaluări
- How to program Baofeng UV-5R for police scanner use in under 40 stepsDocument3 paginiHow to program Baofeng UV-5R for police scanner use in under 40 stepsvu3razÎncă nu există evaluări
- 1 Frequency BandsDocument39 pagini1 Frequency BandsRehan QureshiÎncă nu există evaluări
- Nokia Umts PCIDocument105 paginiNokia Umts PCIRockyÎncă nu există evaluări
- DCS Table of Frequencies SyriaDocument2 paginiDCS Table of Frequencies SyriaJosé CarlosÎncă nu există evaluări
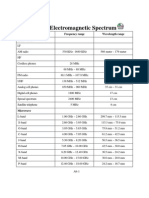
- Electromagnetic Spectrum Frequencies and Wavelengths ChartDocument3 paginiElectromagnetic Spectrum Frequencies and Wavelengths Chartsushant sharmaÎncă nu există evaluări
- Regulation For Charging The Tariffs of Frequency SpectrumDocument10 paginiRegulation For Charging The Tariffs of Frequency SpectrumterzikaÎncă nu există evaluări
- Alat KomunikasiDocument3 paginiAlat KomunikasiSugeng DjatmikoÎncă nu există evaluări
- Tushar Jain StatsDocument9 paginiTushar Jain Statstushar jainÎncă nu există evaluări
- Radio Frequency - Wikipedia, The Free EncyclopediaDocument3 paginiRadio Frequency - Wikipedia, The Free EncyclopediaAlina MariaÎncă nu există evaluări
- Umts Bc1,..Bc8Document3 paginiUmts Bc1,..Bc8fkkgđkjkÎncă nu există evaluări
- Wilkinson Power DividerDocument21 paginiWilkinson Power Dividerhim92Încă nu există evaluări
- Daiwa CNA-2002 - Instruction ManualDocument12 paginiDaiwa CNA-2002 - Instruction Manuallockhimupasap100% (1)
- TD0641Document1 paginăTD0641Kartik JoshiÎncă nu există evaluări
- Bang&Oluben service manual RF and AF diagramsDocument61 paginiBang&Oluben service manual RF and AF diagramsDJALMA MOREIRAÎncă nu există evaluări
- The Malawi Government Gazette: (Published by Authority)Document8 paginiThe Malawi Government Gazette: (Published by Authority)fazadoÎncă nu există evaluări
- Antenna TypeDocument7 paginiAntenna TypeSony SonjayaÎncă nu există evaluări
- Radio Frequency Plan for NEC Pasolink NEO Digital Radio SystemDocument90 paginiRadio Frequency Plan for NEC Pasolink NEO Digital Radio Systemlibo gomezÎncă nu există evaluări
- MC 05-89Document3 paginiMC 05-89Sanji VinsmokeÎncă nu există evaluări
- Ieee 521-2002Document10 paginiIeee 521-2002Dante P. ChÎncă nu există evaluări
- INDUCTANCES PRICE LISTDocument8 paginiINDUCTANCES PRICE LISThermesÎncă nu există evaluări
- Electromagnetic SpectrumDocument3 paginiElectromagnetic SpectrumJavierÎncă nu există evaluări