S-ar putea să vă placă și
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDe la EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkÎncă nu există evaluări
- Common Source Amplifier ExperimentDocument3 paginiCommon Source Amplifier Experimentappuamreddy100% (3)
- Faraday Law of Electromagnetic InductionDocument5 paginiFaraday Law of Electromagnetic Inductionantex nebyuÎncă nu există evaluări
- Polyphase Induction MachinesDocument7 paginiPolyphase Induction Machinespurushg62Încă nu există evaluări
- Bee Unit4 Lecture2Document7 paginiBee Unit4 Lecture2haiderÎncă nu există evaluări
- Sardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramDocument23 paginiSardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramSANJAYÎncă nu există evaluări
- Slip Power Recovery SchemesDocument24 paginiSlip Power Recovery SchemesMagudeeswaran MagudeeswaranÎncă nu există evaluări
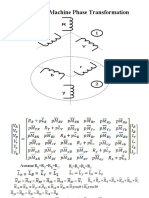
- Induction Machine Phase TransformationDocument20 paginiInduction Machine Phase Transformation7sn omerÎncă nu există evaluări
- High Chopper Frequency Drive of Wound Rotor Induction MotorDocument5 paginiHigh Chopper Frequency Drive of Wound Rotor Induction MotorchandanjuenggÎncă nu există evaluări
- Lab 3Document10 paginiLab 3Vinay RevanuruÎncă nu există evaluări
- Induction MotorDocument6 paginiInduction MotorMuhamad NafianÎncă nu există evaluări
- Induction Motor Torque-Speed CurveDocument5 paginiInduction Motor Torque-Speed CurveKATY LISBETH MOROCHO GUACHOÎncă nu există evaluări
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorDocument12 paginiPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarÎncă nu există evaluări
- ISM To Accompany Electric Machinery and Power System Fundamentals 1 - eDocument2 paginiISM To Accompany Electric Machinery and Power System Fundamentals 1 - eLia PalmaÎncă nu există evaluări
- Kramer DriveDocument42 paginiKramer DriveSenthil Kumar100% (1)
- Three-Phase Induction MotorDocument17 paginiThree-Phase Induction MotorAdarsh AdarshÎncă nu există evaluări
- Synchronous Machine Characteristics and OperationDocument20 paginiSynchronous Machine Characteristics and Operationhozipek5599Încă nu există evaluări
- The Dynamic Braking of Induction MotorsDocument9 paginiThe Dynamic Braking of Induction MotorsSúta SzalaiÎncă nu există evaluări
- Module 7 - AC Drives Induction MotorDocument32 paginiModule 7 - AC Drives Induction MotorsyakirmustapaÎncă nu există evaluări
- Electric Machine Ch06Document12 paginiElectric Machine Ch06carlos abreuÎncă nu există evaluări
- Induction Motor Modeling - Steady StateDocument43 paginiInduction Motor Modeling - Steady Statedivinelight100% (3)
- Soal UTS 2017Document6 paginiSoal UTS 2017Kukuh WidarsonoÎncă nu există evaluări
- EE 4PM4 Quiz 1 Solutions - 2016-17Document4 paginiEE 4PM4 Quiz 1 Solutions - 2016-17PreethamÎncă nu există evaluări
- Induction Motor Drive PDFDocument8 paginiInduction Motor Drive PDFSwostik RoutÎncă nu există evaluări
- Ac Motors War-MebDocument10 paginiAc Motors War-MebolingxjcÎncă nu există evaluări
- 17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7Document18 pagini17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7ming yangÎncă nu există evaluări
- Chapter Two on ServomotorsDocument48 paginiChapter Two on ServomotorsBehnamÎncă nu există evaluări
- 3 PhaseInductionMotors BookChapter 1Document19 pagini3 PhaseInductionMotors BookChapter 1Rohan ShrivastavaÎncă nu există evaluări
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocument15 paginiLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuÎncă nu există evaluări
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocument63 paginiElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeÎncă nu există evaluări
- Lecture 4 - DC Machines ApplicationsDocument29 paginiLecture 4 - DC Machines ApplicationsAbdo EssaÎncă nu există evaluări
- CH 3 - Induction MotorsDocument46 paginiCH 3 - Induction MotorsMiz AelyfhaÎncă nu există evaluări
- EEE3001 Lab ManualDocument66 paginiEEE3001 Lab ManualReshab Sahoo100% (1)
- Dynamic Modeling of PMSMDocument10 paginiDynamic Modeling of PMSMHisham Magdi El DeebÎncă nu există evaluări
- Induction Motor Construction and OperationDocument23 paginiInduction Motor Construction and OperationDaniyar SeytenovÎncă nu există evaluări
- Chapter 3 Induction MotorDocument21 paginiChapter 3 Induction Motorahmed aliÎncă nu există evaluări
- Unit-II - Part - III - Electric Braking FEDDocument11 paginiUnit-II - Part - III - Electric Braking FEDHarish ChandraÎncă nu există evaluări
- Electrical Machines: Induction Motors - NoteDocument41 paginiElectrical Machines: Induction Motors - NotealeeshaÎncă nu există evaluări
- Speed Control of Wound Rotor Induction Motor Using Rotor Resistance ControlDocument5 paginiSpeed Control of Wound Rotor Induction Motor Using Rotor Resistance ControlvpzfarisÎncă nu există evaluări
- Chapter 3 - Induction Motor ContDocument37 paginiChapter 3 - Induction Motor ContMuhammadÎncă nu există evaluări
- Lecture Note - ED - Speed Control of IMDocument5 paginiLecture Note - ED - Speed Control of IMsashaikhÎncă nu există evaluări
- نجيبDocument10 paginiنجيبMalik ZaidÎncă nu există evaluări
- InductionMotors Gate Material PartBDocument38 paginiInductionMotors Gate Material PartBpraveen6494Încă nu există evaluări
- Chapter 3Document15 paginiChapter 3Moin AshrafÎncă nu există evaluări
- Induction Motor Equivalent Circuit ExplainedDocument15 paginiInduction Motor Equivalent Circuit ExplainedJonathan ArturoÎncă nu există evaluări
- 21EE44-Module 3Document18 pagini21EE44-Module 3AshwiniÎncă nu există evaluări
- Three-Phase Induction MachinesDocument46 paginiThree-Phase Induction MachinesWakgari TadesaÎncă nu există evaluări
- 3-Phase Induction Motor GuideDocument108 pagini3-Phase Induction Motor GuideKshitij ShrivastavaÎncă nu există evaluări
- Induction Motor FundamentalsDocument26 paginiInduction Motor FundamentalsarifulÎncă nu există evaluări
- ECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Document9 paginiECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Tran Nguyen KhangÎncă nu există evaluări
- EMII - Lecture 18 - Induction MachinesDocument14 paginiEMII - Lecture 18 - Induction MachinesHassan Al BaityÎncă nu există evaluări
- 3-Phase AC Induction Motor PrinciplesDocument8 pagini3-Phase AC Induction Motor PrinciplesKristine VicenteÎncă nu există evaluări
- Speed Control Of Wound Rotor Induction Motor Using Rotor Resistance ControlDocument3 paginiSpeed Control Of Wound Rotor Induction Motor Using Rotor Resistance ControlHitesh PanigrahiÎncă nu există evaluări
- Dcmotors and Their RepresentationDocument61 paginiDcmotors and Their RepresentationSoeprapto AtmariÎncă nu există evaluări
- 7 Induction Motor BasicsDocument51 pagini7 Induction Motor BasicsFos AlharbiÎncă nu există evaluări
- Lec4 Polyphase Induction Motor IIDocument14 paginiLec4 Polyphase Induction Motor IIMohammed Dyhia AliÎncă nu există evaluări
- Beee Unit-4 Induction & Synchronous MotorsDocument27 paginiBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriÎncă nu există evaluări
- Salient Pole Alternator Theory and AnalysisDocument7 paginiSalient Pole Alternator Theory and Analysiskjel reida jøssanÎncă nu există evaluări
- 7 - Lecture - Induction MotorsDocument41 pagini7 - Lecture - Induction MotorspaurushgodharÎncă nu există evaluări
- Data - User - 0 - Org - Mozilla.firefox - App - Tmpdir - Full Adder in Digital Logic - GeeksforGeeks PDFDocument3 paginiData - User - 0 - Org - Mozilla.firefox - App - Tmpdir - Full Adder in Digital Logic - GeeksforGeeks PDFSuleiman Abubakar AuduÎncă nu există evaluări
- A Financial Statement Analysis Project FDocument2 paginiA Financial Statement Analysis Project FSuleiman Abubakar AuduÎncă nu există evaluări
- Boolean Algebra ExplainedDocument18 paginiBoolean Algebra ExplainedSuleiman Abubakar AuduÎncă nu există evaluări
- Complex EigenvaluesDocument21 paginiComplex EigenvaluesSuleiman Abubakar AuduÎncă nu există evaluări
- Full AdderDocument4 paginiFull AdderSuleiman Abubakar AuduÎncă nu există evaluări
- Transformer CalculationDocument25 paginiTransformer CalculationSathiyanathan ManiÎncă nu există evaluări
- Profile 1 PDFDocument1 paginăProfile 1 PDFSuleiman Abubakar AuduÎncă nu există evaluări
- Boolean Algebra ExplainedDocument18 paginiBoolean Algebra ExplainedSuleiman Abubakar AuduÎncă nu există evaluări
- Sec 1Document7 paginiSec 1Suleiman Abubakar AuduÎncă nu există evaluări
- EngineerDocument4 paginiEngineerSuleiman Abubakar AuduÎncă nu există evaluări
- Data - User - 0 - Org - Mozilla.firefox - App - Tmpdir - Full Adder in Digital Logic - GeeksforGeeksDocument3 paginiData - User - 0 - Org - Mozilla.firefox - App - Tmpdir - Full Adder in Digital Logic - GeeksforGeeksSuleiman Abubakar AuduÎncă nu există evaluări
- A Financial Statement Analysis Project FDocument2 paginiA Financial Statement Analysis Project FAliÎncă nu există evaluări
- Chine PDFDocument2 paginiChine PDFSuleiman Abubakar AuduÎncă nu există evaluări
- Power System Protection and Switchgear Power System Protection and Switchgear Power System Protection and Switchgear Power System Protection, Volume 2 Switchgear and Power System ProtectionDocument1 paginăPower System Protection and Switchgear Power System Protection and Switchgear Power System Protection and Switchgear Power System Protection, Volume 2 Switchgear and Power System ProtectionSatish PurviÎncă nu există evaluări
- MachineDocument74 paginiMachineSuleiman Abubakar AuduÎncă nu există evaluări
- BT3S15JUN17Document44 paginiBT3S15JUN17Suleiman Abubakar AuduÎncă nu există evaluări
- The Impact of Road Transport On The EnviDocument8 paginiThe Impact of Road Transport On The EnviSuleiman Abubakar AuduÎncă nu există evaluări
- Drmajidaltamimi - Abet CV 2015 PDFDocument2 paginiDrmajidaltamimi - Abet CV 2015 PDFSuleiman Abubakar AuduÎncă nu există evaluări
- Three-Phase Alternator Performance AnalysisDocument11 paginiThree-Phase Alternator Performance AnalysisOnofre Algara Jr.100% (4)
- Free Mechanical Aptitude Questions 1Document5 paginiFree Mechanical Aptitude Questions 1Michael WestÎncă nu există evaluări
- Ch05 NotesDocument6 paginiCh05 NotesKaneÎncă nu există evaluări
- Tax Incentives and Growth of SMEs in NigeriaDocument19 paginiTax Incentives and Growth of SMEs in NigeriaSuleiman Abubakar AuduÎncă nu există evaluări
- IT Business Plans Chicago PDFDocument2 paginiIT Business Plans Chicago PDFSuleiman Abubakar AuduÎncă nu există evaluări
- The Impact of Road Transport On The EnviDocument8 paginiThe Impact of Road Transport On The EnviSuleiman Abubakar AuduÎncă nu există evaluări
- Scilab Textbook Companion For Digital Electronics: Circuits and Systems by V. K. PuriDocument134 paginiScilab Textbook Companion For Digital Electronics: Circuits and Systems by V. K. PuriSuleiman Abubakar AuduÎncă nu există evaluări
- MANAGEMENT OF NIGER DELTA CRISESDocument16 paginiMANAGEMENT OF NIGER DELTA CRISESSuleiman Abubakar AuduÎncă nu există evaluări
- Section A: Overview of The Research Project ProposalDocument5 paginiSection A: Overview of The Research Project ProposalSuleiman Abubakar AuduÎncă nu există evaluări
- Lateral Earth Pressure For Non-Geotechnical EngineersDocument10 paginiLateral Earth Pressure For Non-Geotechnical EngineersMahaveer Janapala75% (8)
- Reservoir Characterization A Case Study of Wells in Niger Delta, NigeriaDocument13 paginiReservoir Characterization A Case Study of Wells in Niger Delta, NigeriaSuleiman Abubakar AuduÎncă nu există evaluări
- TP48200A-HT19C3&HT19C4 Outdoor Power System Datasheet 01 - (20140225)Document2 paginiTP48200A-HT19C3&HT19C4 Outdoor Power System Datasheet 01 - (20140225)se7en_csÎncă nu există evaluări
- Fault Current For Solid 3-Phase FaultDocument3 paginiFault Current For Solid 3-Phase Faultleoluckose100% (1)
- Case Study On Averting Distribution Transformers FailureDocument18 paginiCase Study On Averting Distribution Transformers FailureLalit ChoudharyÎncă nu există evaluări
- 240-62772907 Spec For Diesel GeneratorsDocument62 pagini240-62772907 Spec For Diesel GeneratorsMohsin ElgondiÎncă nu există evaluări
- Watt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var TransducerDocument2 paginiWatt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var TransducerAdam SatrioÎncă nu există evaluări
- Product Brochure: Suzhou Cosuper Energy Technology Co.,LtdDocument8 paginiProduct Brochure: Suzhou Cosuper Energy Technology Co.,LtdshaidaÎncă nu există evaluări
- DSR Ktps Sat-Thu 19-02-2024Document2 paginiDSR Ktps Sat-Thu 19-02-2024amit kumarÎncă nu există evaluări
- Price List: PFC and Key Components CapacitorsDocument24 paginiPrice List: PFC and Key Components CapacitorsChristina BoydÎncă nu există evaluări
- Sri Lanka's Shift to Renewable Energy SourcesDocument8 paginiSri Lanka's Shift to Renewable Energy SourcesGayan Sanka PereraÎncă nu există evaluări
- Transmission Line Fault Detection Using Android Application Via BluetoothDocument5 paginiTransmission Line Fault Detection Using Android Application Via BluetoothRavi VermaÎncă nu există evaluări
- Inverter 2000: Stand-Alone Telecom InverterDocument2 paginiInverter 2000: Stand-Alone Telecom InverterJohn WikieÎncă nu există evaluări
- SymetricalDocument49 paginiSymetricalAlvii RahmahÎncă nu există evaluări
- Electromagnetic-Induction Practice Worksheet PhysicsDocument9 paginiElectromagnetic-Induction Practice Worksheet PhysicsSimrithi SÎncă nu există evaluări
- Ra 9136Document117 paginiRa 9136Jan VegaÎncă nu există evaluări
- Chapter 5 (Synchoronous Machine)Document77 paginiChapter 5 (Synchoronous Machine)Lij Girmachew Tekel HawariatÎncă nu există evaluări
- A. CHANDRA-Cap. Bank DesigningDocument5 paginiA. CHANDRA-Cap. Bank Designingluizwillcox100% (2)
- Taylor Lifts SMSCatalogueDocument18 paginiTaylor Lifts SMSCatalogueMohd Abu AjajÎncă nu există evaluări
- Three-Phase AC Machines: Resource 6Document12 paginiThree-Phase AC Machines: Resource 6krishnareddy_chintalaÎncă nu există evaluări
- Unit-I: 1. What Is An Inverter?Document12 paginiUnit-I: 1. What Is An Inverter?Gnanaseharan ArunachalamÎncă nu există evaluări
- SOP For Turbine ChecklistDocument11 paginiSOP For Turbine Checklistpradeep.selvarajanÎncă nu există evaluări
- Sivaramakrishnan Part 1Document23 paginiSivaramakrishnan Part 1ShadifÎncă nu există evaluări
- Industrial Visit ReportDocument1 paginăIndustrial Visit ReportDennis SamuelÎncă nu există evaluări
- SOLAR PV EMULATOR NEW MANUAL - Rev 1 PDFDocument33 paginiSOLAR PV EMULATOR NEW MANUAL - Rev 1 PDFSatyaraj SharmaÎncă nu există evaluări
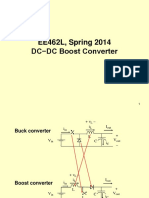
- DC DC Boost ConverterDocument21 paginiDC DC Boost Converterrokbraihan2Încă nu există evaluări
- Reversing Three Phase Induction MotorsDocument4 paginiReversing Three Phase Induction MotorsBehind SilhouetteÎncă nu există evaluări
- Siemens Wiac - Info PDF Iec 62271 200 Switchgear PRDocument22 paginiSiemens Wiac - Info PDF Iec 62271 200 Switchgear PRAu Psl FightFor GreatVictoryÎncă nu există evaluări
- Sliding Pressure Operation in Combined CyclesDocument5 paginiSliding Pressure Operation in Combined CyclesAnonymous knICaxÎncă nu există evaluări
- Install and operate 10000HY hybrid inverter less than 40 charactersDocument32 paginiInstall and operate 10000HY hybrid inverter less than 40 charactersCyrille Aubry KAMGNO T.Încă nu există evaluări
- Global Electric Service Provider: TBEA Shandong Luneng Taishan Cable Co., LTDDocument32 paginiGlobal Electric Service Provider: TBEA Shandong Luneng Taishan Cable Co., LTDmd saikotÎncă nu există evaluări
- Bussbarr Corp Power Circuit Breaker SpecsDocument3 paginiBussbarr Corp Power Circuit Breaker SpecsLucio Loyloy SanchezÎncă nu există evaluări