S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Answer Keys Are at The End of The Document.: Section #1 - These Questions Are Worth Two Marks EachDocument26 paginiThe Answer Keys Are at The End of The Document.: Section #1 - These Questions Are Worth Two Marks Eachdsa0% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Exploring Science International ContentsDocument4 paginiExploring Science International ContentsR S67% (6)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Solidification and Crystalline Imperfection Part 1Document25 paginiSolidification and Crystalline Imperfection Part 1Aiman MutallidÎncă nu există evaluări
- Transformer Protection - ProjectDocument12 paginiTransformer Protection - ProjectDEADMANÎncă nu există evaluări
- Analytical Cross Sections For Monte Carlo Simulation of Photon Transport PDFDocument22 paginiAnalytical Cross Sections For Monte Carlo Simulation of Photon Transport PDFFernanda RibeiroÎncă nu există evaluări
- Chandak 2015 IOP Conf. Ser. Mater. Sci. Eng. 88 012033Document9 paginiChandak 2015 IOP Conf. Ser. Mater. Sci. Eng. 88 012033luis900000Încă nu există evaluări
- Transient Behaviour of Grounding GridsDocument115 paginiTransient Behaviour of Grounding Gridsluis900000Încă nu există evaluări
- Aditya Paperx 12 ECCE Asia Common Mode Current ControlDocument7 paginiAditya Paperx 12 ECCE Asia Common Mode Current Controlluis900000Încă nu există evaluări
- ZigZag Transformer in ATPDocument10 paginiZigZag Transformer in ATPCesar ZamudioÎncă nu există evaluări
- Didik FinalDocument80 paginiDidik FinalK Vijay Bhaskar ReddyÎncă nu există evaluări
- EV&T July2013 ArticleDocument1 paginăEV&T July2013 Articleluis900000Încă nu există evaluări
- 3 F 55Document5 pagini3 F 55luis900000Încă nu există evaluări
- Factors Influency The Design of Large High-Voltage Power Transformers 2ProceedingsofJan1968Document28 paginiFactors Influency The Design of Large High-Voltage Power Transformers 2ProceedingsofJan1968luis900000Încă nu există evaluări
- Pyrhonen Squirrel Cage Motor Calculation Mathcad13 PDFDocument35 paginiPyrhonen Squirrel Cage Motor Calculation Mathcad13 PDFluis900000Încă nu există evaluări
- Solvers and Geometry Simplification (M01) : Quick Reference GuideDocument2 paginiSolvers and Geometry Simplification (M01) : Quick Reference Guideluis900000Încă nu există evaluări
- Flux & FluxMotor New Features 12.2Document88 paginiFlux & FluxMotor New Features 12.2luis900000Încă nu există evaluări
- 3 F 55Document5 pagini3 F 55luis900000Încă nu există evaluări
- Prius Motor - Maxwell 2D Transient To FLUENT 3D Steady State Maxwell 2D Transient To FLUENT 3D Steady State CouplingDocument11 paginiPrius Motor - Maxwell 2D Transient To FLUENT 3D Steady State Maxwell 2D Transient To FLUENT 3D Steady State Couplingluis900000Încă nu există evaluări
- Prace Autumn School 2013 Ponzini Cineca SailddeslectureDocument20 paginiPrace Autumn School 2013 Ponzini Cineca Sailddeslectureluis900000Încă nu există evaluări
- Ansoft HFSS - 3D Boundary Manager Topics: BoundariesDocument24 paginiAnsoft HFSS - 3D Boundary Manager Topics: Boundariesluis900000Încă nu există evaluări
- Maxwell ANSYS Tutorial For Simulating Conductors For Inductance/Resistance Measurements Includes Analysis of Mesh Setup For ANSYS Adaptive SolutionsDocument14 paginiMaxwell ANSYS Tutorial For Simulating Conductors For Inductance/Resistance Measurements Includes Analysis of Mesh Setup For ANSYS Adaptive Solutionsluis900000Încă nu există evaluări
- P1755 WebDocument104 paginiP1755 Webluis900000Încă nu există evaluări
- Pid1879911 PDFDocument8 paginiPid1879911 PDFluis900000Încă nu există evaluări
- WTI CircuitDocument1 paginăWTI Circuitluis900000Încă nu există evaluări
- Ansys TutorialDocument17 paginiAnsys Tutorialluis900000Încă nu există evaluări
- Simcenter 3D LFEM - Tutorial Power TransformerDocument40 paginiSimcenter 3D LFEM - Tutorial Power Transformerluis900000Încă nu există evaluări
- TSWDocument15 paginiTSWluis900000Încă nu există evaluări
- Overcoming The Challenges of Hybrid/Electric Vehicle Traction Motor DesignDocument12 paginiOvercoming The Challenges of Hybrid/Electric Vehicle Traction Motor Designluis900000Încă nu există evaluări
- Simcenter 3D LFEM - Tutorial Power TransformerDocument40 paginiSimcenter 3D LFEM - Tutorial Power Transformerluis900000Încă nu există evaluări
- Appendix C: ANSYS TEG TutorialDocument11 paginiAppendix C: ANSYS TEG Tutorialluis900000Încă nu există evaluări
- 2004 UGM Tips TricksDocument75 pagini2004 UGM Tips Tricksero262Încă nu există evaluări
- XFMRDocument16 paginiXFMRluis900000Încă nu există evaluări
- Science8 q1 Mod2 LawsOfMotion FINAL07282020Document21 paginiScience8 q1 Mod2 LawsOfMotion FINAL07282020Grayson RicardoÎncă nu există evaluări
- Beam Deflection 2bDocument2 paginiBeam Deflection 2bKrisia MartinezÎncă nu există evaluări
- Chapter 12 Notes Gas Laws NotesDocument2 paginiChapter 12 Notes Gas Laws NotesNancy Richardson RollinsÎncă nu există evaluări
- Saas-Fee Advanced Course 36Document381 paginiSaas-Fee Advanced Course 36Maria TeresaÎncă nu există evaluări
- Particle Model of MatterDocument25 paginiParticle Model of Matterapi-422428700Încă nu există evaluări
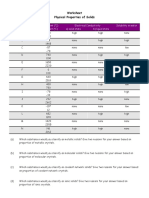
- 8 WORKSHEET Properties of SolidsDocument1 pagină8 WORKSHEET Properties of Solidskomal sheikhÎncă nu există evaluări
- Mansfield E. H., The Bending and Stretching of Plates, 2nd Ed, 1989Document240 paginiMansfield E. H., The Bending and Stretching of Plates, 2nd Ed, 1989Allan GavinoÎncă nu există evaluări
- Me402 HW 4 Finals PDFDocument1 paginăMe402 HW 4 Finals PDFMikko Omaña0% (2)
- 9702 Nos Ps 5 PDFDocument4 pagini9702 Nos Ps 5 PDFDe NimÎncă nu există evaluări
- Differential Transformation MethodDocument11 paginiDifferential Transformation MethodSergio UrquietaÎncă nu există evaluări
- Phy213 CH29 Worksheet-KeyDocument5 paginiPhy213 CH29 Worksheet-KeynjparÎncă nu există evaluări
- Radio Wave PropagationDocument12 paginiRadio Wave Propagationمصطفى نوزادÎncă nu există evaluări
- Forces Part 3Document67 paginiForces Part 3Sivaraman AlagappanÎncă nu există evaluări
- Tesla Coil For Electro-MagnetsDocument13 paginiTesla Coil For Electro-Magnetsdllabarre100% (1)
- (Unit) Title of The Chapter Name of FacilitatorDocument35 pagini(Unit) Title of The Chapter Name of FacilitatorDipesh BasnetÎncă nu există evaluări
- Analysis of Residual Stresses and Distortions in T Joint Fillet WeldsDocument16 paginiAnalysis of Residual Stresses and Distortions in T Joint Fillet WeldsDebabrata PodderÎncă nu există evaluări
- PARATIE EN - Advanced-Modelling-2014 PDFDocument50 paginiPARATIE EN - Advanced-Modelling-2014 PDFJPachasÎncă nu există evaluări
- Gas DiffusionDocument15 paginiGas DiffusionOh DausÎncă nu există evaluări
- Transgressing The BoundariesDocument24 paginiTransgressing The BoundariesRandolph DibleÎncă nu există evaluări
- ChemDocument4 paginiChemdebabrata_nagÎncă nu există evaluări
- Microwave Lab ManualDocument56 paginiMicrowave Lab ManualPrem Sharma100% (1)
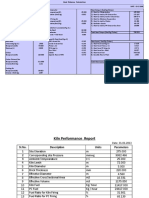
- Heat Balance GCLDocument6 paginiHeat Balance GCLIrshad HussainÎncă nu există evaluări
- X. Rotational Equilibrium and Rotational DynamicsDocument17 paginiX. Rotational Equilibrium and Rotational DynamicsPatrick SibandaÎncă nu există evaluări
- Make An Atomic Theory Timeline! PDFDocument4 paginiMake An Atomic Theory Timeline! PDFNathan KenmognieÎncă nu există evaluări
- Dynamic Stability Analysis of A Tethered AerostatDocument8 paginiDynamic Stability Analysis of A Tethered AerostatNick SetarÎncă nu există evaluări
- S1-3 MicrosensorsDocument15 paginiS1-3 Microsensorssrinathgudur11100% (1)