S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- A Significant Step Forward in Electric Propulsion Increasing Vessel Efficiency Up To 20%Document2 paginiA Significant Step Forward in Electric Propulsion Increasing Vessel Efficiency Up To 20%ArturoÎncă nu există evaluări
- BXW-L Safety Brakes - Datasheet: Braking UseDocument4 paginiBXW-L Safety Brakes - Datasheet: Braking UseDaniel DorettoÎncă nu există evaluări
- 8-Turbine PerformanceDocument17 pagini8-Turbine PerformanceYohan ManaligodÎncă nu există evaluări
- 7I Energy ResourcesDocument25 pagini7I Energy ResourcesChristineÎncă nu există evaluări
- Agri-Voltaic System:: Crop Production and Photovoltaic-Based Electricity Generation From A Single Land UnitDocument4 paginiAgri-Voltaic System:: Crop Production and Photovoltaic-Based Electricity Generation From A Single Land UnitPNV Srinivasa RaoÎncă nu există evaluări
- Applied Mechanics CH 1Document11 paginiApplied Mechanics CH 1Tushar KiranÎncă nu există evaluări
- 78-Sine and Cosine RuleDocument8 pagini78-Sine and Cosine RuleSameh SalahÎncă nu există evaluări
- Shindengen: Super Fast Recovery RectifiersDocument7 paginiShindengen: Super Fast Recovery RectifiersCharbel TadrosÎncă nu există evaluări
- Bluestar VRV SystemDocument19 paginiBluestar VRV SystemArun Kumar PÎncă nu există evaluări
- Renewable and Sustainable Energy Reviews: F. Martin-Martínez, A. Sánchez-Miralles, M. RivierDocument21 paginiRenewable and Sustainable Energy Reviews: F. Martin-Martínez, A. Sánchez-Miralles, M. Riviermohammadreza babaieÎncă nu există evaluări
- Manual Casio Qw5239Document9 paginiManual Casio Qw5239Radu Cosmin TudorÎncă nu există evaluări
- 3x25mm FCU-PVC-PVC 1 KV (TD)Document2 pagini3x25mm FCU-PVC-PVC 1 KV (TD)HaikalÎncă nu există evaluări
- Trane Taystat 370 371 380 Electronic Thermostats Owners Guide ENDocument12 paginiTrane Taystat 370 371 380 Electronic Thermostats Owners Guide ENTerrence JonesÎncă nu există evaluări
- Bliss Anand America - Magnetic Level Gauges - NewDocument25 paginiBliss Anand America - Magnetic Level Gauges - NewNikhil WadhwaÎncă nu există evaluări
- Four Quadrant Chopper or Class-E Chopper - Electrical ConceptsDocument3 paginiFour Quadrant Chopper or Class-E Chopper - Electrical ConceptsGOVERNMENT APPRENTICESHIPÎncă nu există evaluări
- Aicte Syllabus 2018Document71 paginiAicte Syllabus 2018Vishal K. DhimanÎncă nu există evaluări
- Lecture RadiationDocument16 paginiLecture Radiationzakibrant23Încă nu există evaluări
- Radial Leaded 3PTC Resettable Fuse: FRX 050-60F: 1. SummaryDocument7 paginiRadial Leaded 3PTC Resettable Fuse: FRX 050-60F: 1. SummaryАнатолий ДонецкÎncă nu există evaluări
- SuperpositionDocument4 paginiSuperpositionHatta AimanÎncă nu există evaluări
- ElectroDocument4 paginiElectroSUYASH SHARTHIÎncă nu există evaluări
- Harmonicguard Series Drive-Applied Harmonic Filter Installation, Operation, and Maintenance ManualDocument67 paginiHarmonicguard Series Drive-Applied Harmonic Filter Installation, Operation, and Maintenance ManualGanesh MurthyÎncă nu există evaluări
- Plane Balancing of Rotors PresentationDocument29 paginiPlane Balancing of Rotors PresentationOleg1142Încă nu există evaluări
- Paper 35 Hazards24Document11 paginiPaper 35 Hazards24Sri NivasÎncă nu există evaluări
- PDFDocument9 paginiPDFjayonline_4uÎncă nu există evaluări
- HL-Relativity WorksheetDocument2 paginiHL-Relativity WorksheetshilmisahinÎncă nu există evaluări
- Temperature Rise Estimations in Rogers High Frequency Circuit Boards Carrying Direct or RF CurrentDocument2 paginiTemperature Rise Estimations in Rogers High Frequency Circuit Boards Carrying Direct or RF Currentanon_901131682Încă nu există evaluări
- Naca 0012Document10 paginiNaca 0012Mohit GulatiÎncă nu există evaluări
- NT-Series UPS Installation and Commissioning Check ListDocument20 paginiNT-Series UPS Installation and Commissioning Check ListWalter AchayaÎncă nu există evaluări
- Electromagnetic Wave Propagation (II)Document21 paginiElectromagnetic Wave Propagation (II)vasanthi_thiyagarajaÎncă nu există evaluări
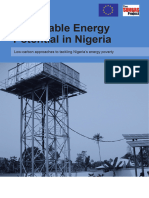
- Renewable Energy Potential in Nigeria: Low-Carbon Approaches To Tackling Nigeria's Energy PovertyDocument36 paginiRenewable Energy Potential in Nigeria: Low-Carbon Approaches To Tackling Nigeria's Energy PovertyOloyede JeremiahÎncă nu există evaluări