S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
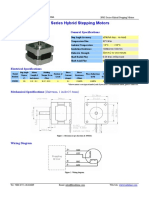
- 39HS Series Hybrid Stepping Motors: General SpecificationsDocument1 pagină39HS Series Hybrid Stepping Motors: General SpecificationsKevinÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Caspoc 2003: A Simulation Experience!Document70 paginiCaspoc 2003: A Simulation Experience!KevinÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Remotely Operated Underwater Vehicle (ROV) 100% Report: EML 4905 Senior Design ProjectDocument40 paginiRemotely Operated Underwater Vehicle (ROV) 100% Report: EML 4905 Senior Design ProjectKevinÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Getting Started Simulation Research: CASPOCDocument18 paginiGetting Started Simulation Research: CASPOCKevinÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Distributed Generation and Renewables: Power Quality and Utilisation GuideDocument14 paginiDistributed Generation and Renewables: Power Quality and Utilisation GuideKevinÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Hyundai Cma CGMDocument42 paginiHyundai Cma CGMKevinÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- 69NT40 - 551 - 500 TO 549: Container RefrigerationDocument114 pagini69NT40 - 551 - 500 TO 549: Container RefrigerationKevinÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- CMP128010000 - MultiPlus 12V 800W 230V Inverter - Anleitung PDFDocument160 paginiCMP128010000 - MultiPlus 12V 800W 230V Inverter - Anleitung PDFKevinÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Tesla Sample EDR Report XDocument28 paginiTesla Sample EDR Report XarstjunkÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Polaris Atv Service Manual Repair 1985-1995 All ModelsDocument468 paginiPolaris Atv Service Manual Repair 1985-1995 All ModelsRodney Langley86% (151)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- TL 410 LHD Specification: Tunnel Mine Equipment Co.,LtdDocument10 paginiTL 410 LHD Specification: Tunnel Mine Equipment Co.,LtdМаксим СтратилаÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- MS16 Yaya Kumandalı İstif MakinalasıDocument5 paginiMS16 Yaya Kumandalı İstif Makinalasımehmetaliozgur100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Triumph Maintenance Chart 6k Mile Service IntervalDocument1 paginăTriumph Maintenance Chart 6k Mile Service IntervalalexÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Tom-I Question Bank UpdatedDocument174 paginiTom-I Question Bank Updatedkiran_wakchaureÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- CHWJ-1H Technical Data BF4L914Document5 paginiCHWJ-1H Technical Data BF4L914nikolaimendozasÎncă nu există evaluări
- L-4 COC Knowlge Exam 2013Document6 paginiL-4 COC Knowlge Exam 2013Abdulkerim Sebre100% (1)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Caracteristicas PS360CDocument12 paginiCaracteristicas PS360COscarÎncă nu există evaluări
- Pulverizador 4700Document780 paginiPulverizador 4700Fernando SabinoÎncă nu există evaluări
- Anti Skid SystemDocument9 paginiAnti Skid SystemBarkah Khoerun NissaÎncă nu există evaluări
- 18 Focus ElectricDocument2 pagini18 Focus ElectricchuhuynhÎncă nu există evaluări
- Allison Part ManualDocument16 paginiAllison Part ManualJacob AbrhamÎncă nu există evaluări
- TWG Mobile Crane Fact SheetDocument4 paginiTWG Mobile Crane Fact Sheetj24maybe5963Încă nu există evaluări
- Landini Rex4 Cab F-S-V-GT 80 90 100 110 120Document4 paginiLandini Rex4 Cab F-S-V-GT 80 90 100 110 120gennaro mongiardoÎncă nu există evaluări
- Evaluation of Braking Performance of Disc Brake Rotor With Different Pillar Ventilation Structures IJERTV10IS110170Document9 paginiEvaluation of Braking Performance of Disc Brake Rotor With Different Pillar Ventilation Structures IJERTV10IS110170Ivan FonsecaÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- 830e 5 PDFDocument20 pagini830e 5 PDFLovell Smith100% (1)
- Ezlimo CatalogDocument76 paginiEzlimo CatalogTran Tuan AnhÎncă nu există evaluări
- GDW6115HKDDocument56 paginiGDW6115HKDpl82Încă nu există evaluări
- Motor Grader Rig Out Catalog: Aftermarket Components and Common Maintenance PartsDocument40 paginiMotor Grader Rig Out Catalog: Aftermarket Components and Common Maintenance PartsZeena DeamilÎncă nu există evaluări
- SSP 861503 Noise Vibration and HarshnessDocument84 paginiSSP 861503 Noise Vibration and HarshnessMahmoud S NasereddinÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Brake SystemsDocument60 paginiBrake SystemsMgs RepuestosÎncă nu există evaluări
- Baylor Elmagco Composite PDFDocument12 paginiBaylor Elmagco Composite PDFWill BuickÎncă nu există evaluări
- Model Pl5 Service Manual 1418834752Document31 paginiModel Pl5 Service Manual 1418834752LuisÎncă nu există evaluări
- Mech Disc BrakesDocument19 paginiMech Disc BrakesAmit KhatuaÎncă nu există evaluări
- Checklist Cessna C-152 Checklist Cessna C-152: Forwx& Rnwy ConditionDocument2 paginiChecklist Cessna C-152 Checklist Cessna C-152: Forwx& Rnwy ConditionWilliam Rios100% (1)
- GMK5275 Product Guide ImperialDocument24 paginiGMK5275 Product Guide Imperialosky1954trigoÎncă nu există evaluări
- Friction Coefficient Measurements Between Tire and Pavement Using A Variable Slip TechniqueDocument8 paginiFriction Coefficient Measurements Between Tire and Pavement Using A Variable Slip TechniqueDannyChaconÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Piaggio X7 EVO 125 I.E. (En)Document333 paginiPiaggio X7 EVO 125 I.E. (En)Manualles50% (2)
- AbsDocument30 paginiAbsEhtishaam AbbasÎncă nu există evaluări